
光伏并网逆变技术研究*
2019-08-24 03:12葛笑寒
浙江工贸职业技术学院学报 2019年2期
葛笑寒
(三门峡职业技术学院电气工程学院,河南三门峡472000)
0 引言
光伏技术成为新能源研究领域的焦点[1]。光伏系统要始终保持在最大功率点向电网提供电流。常用扰动观察法可以使面板的功率最大化[2],但常规扰动法易出现震荡和误判;智能跟踪算法有人工神经网络法、模糊逻辑法等[3],但方法较为复杂。
光伏逆变器并网运行,采用电流加权控制的LCL滤波技术能够快速响应消除谐波[4],但对参数变化敏感。逆变输出需要跟踪电网的变化,锁相PLL技术能够实现输出和电网的同步[5],但是计算复杂。因此,考虑用变步长的扰动观察法讨论最大功率跟踪,用电容电流反馈的有源阻尼法进行控制策略分析,用基于二阶积分的锁相技术对输出进行跟踪。
1 光伏逆变系统的结构
如图1所示,系统主要由光伏阵列、DC-DC变换器、有源逆变器及驱动电路构成。DC-DC接收光伏板的电流电压信号,经过双直流变换器,输出交流电信号,最后并网运行。控制器采用MPPT算法、锁相技术等产生PWM脉冲信号,用来驱动主电路工作。并且保障直流母线电压恒定,输出交流电流电压能够和电网电压电流同步。
2 光伏逆变系统的关键技术
2.1 MPPT技术
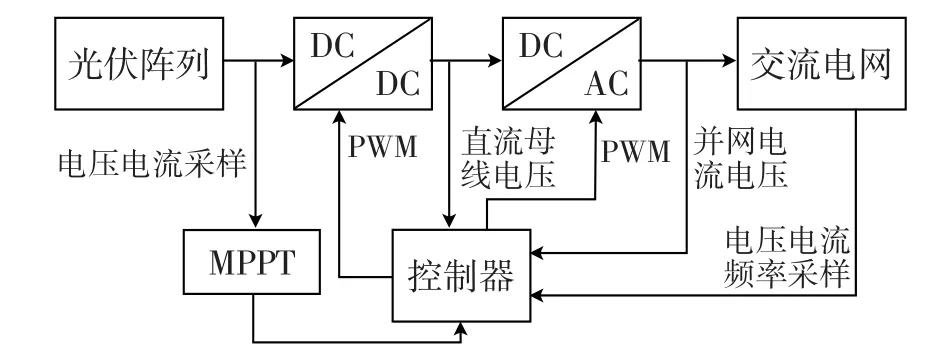
图1 光伏逆变系统结构
根据电路理论,当光伏系统的负载阻抗和电源阻抗相等时,有最大输出功率,因此MPPT控制就是不断调整负载阻抗,使其跟踪输出阻抗,进而实现最大功率传输。系统采集光伏板的电压和电流信号,MPPT计算光伏板的最大功率,直流变换器的控制器G(S)保证光伏板的输出电压始终跟踪MPPT的输出电压。从而使得光伏系统始终工作最大功率点。光伏控制策略主要有电导增量法和扰动观察法等。基于最优梯度的观察法的电压扰动步长能够跟随电池的伏安曲线的斜率自动调整,会随着最大功率点的的距离增加而增加。
假设光伏系统的环境恒定,则MPPT控制最优梯度工作流程如图2所示,设置系统的扰动系数及初始变化率,计算当前光伏电池的功率及梯度。然后设置下个时刻的输出电压参考值,重复这两个过程,直至找到最大功率点。控制器控制光伏板工作在该工作点。
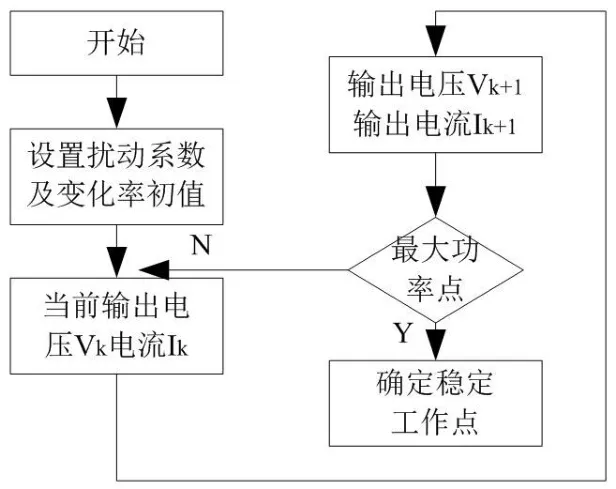
图2 MPPT工作流程
2.2 逆变器电流回路控制
为消除逆变谐波,在其输出侧有一个LCL滤波器,该滤波器就有好的高频衰减能力[6]。如图3所示,这里Vi是逆变器输出电压,Vg是电网电压。这假设电感电流iL的变化对电网电压Vg没有影响。也就是说,这是一个刚性网格系统。这里iL是主电感(逆变器侧电感)中的电流。
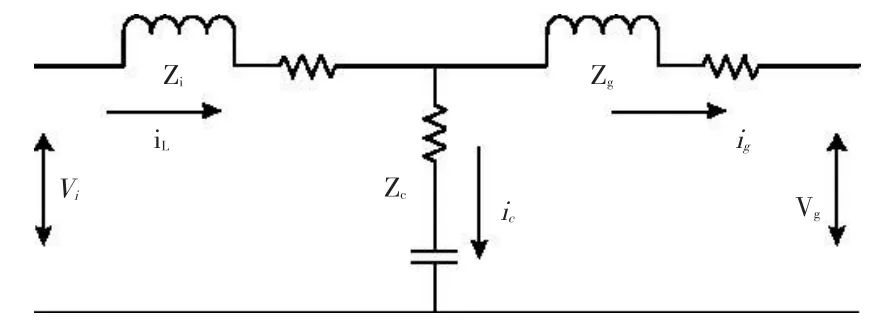
图3 LCL滤波控制器结构
假设流过滤波电容器的电流iC与电感器电流iL相比可以忽略不计,假设电流环控制器设计成使得电网频率下的电流环增益高的情况下使用反馈线性化方案。因此,与逆变器电感电流IL的动态特性相比,VLine可以作为直流参数,即电流环交叉频率远高于电网频率。根据这个假设,并把电流控制器Gc添加到功率图中。图4表明,电流环功率级输入是Ui,它控制电感器电流IL。当输入Ui由电流环路控制器控制时,使得电网频率下的环路增益较高。
图4中Ks是电流反馈增益。因此,控制环的环路增益传递函数是:φ()s=Gc(s)KsGp。

图4 电流控制回路结构
2.3 电网同步锁相环节
逆变器采用锁相环(PLL)使其输出电流与电网电压同步[7]。锁相环控制系统的结构如图5所示,该锁相环由鉴相器(PD),PI控制器和电压控制振荡器(VCO)三个单元组成。当锁相环处于锁定状态时,PD的两输入信号频率一致且有一定的相位差,如果它们的频率不同,则PD会产生一个输出信号,该信号经过PI控制器最终作用在VCO的输入端,VCO的振荡频率发生变化,实现对输入信号频率的自动跟踪,输出相位out与输入信号相位之间保持固定的差值,此时环路处于稳定状态。
鉴相器(PD)由正交信号发生器(QSG)和Park变换器组成,其输出可以用以下方程表示:
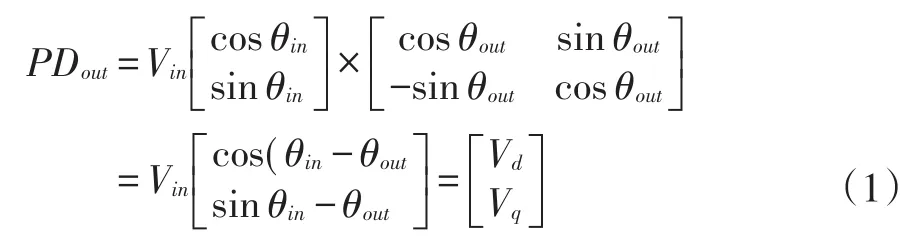
式中:Vin是为输入信号基波的幅值;θin是为基波的相位;θout是为输出相位。系统在稳定时,输出相位跟踪输入型号的相位,即偏差量为零。由式(1)通过Park变换,能够求解出输入和输出的相位差,实现相位鉴别。
根据控制理论,锁相环结构的闭环传递函数为
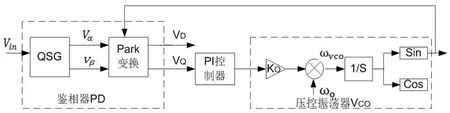
图5 电网同步锁相控制系统结构

将该传递函数和二阶系统标准函数进行比较:

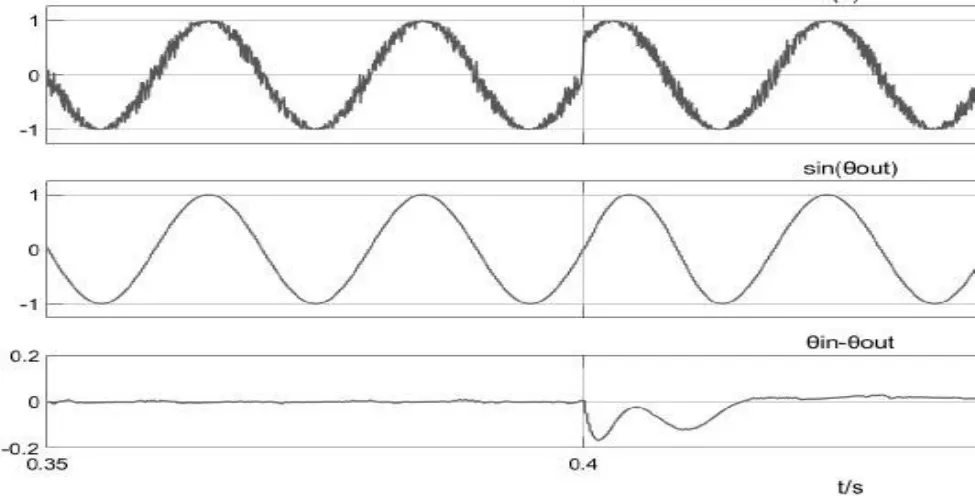
图6 锁相环仿真波形
3 结论
光伏电源的效率和并网运行的稳定性尤为重要。根据常规双直流变换的光伏并网逆变器的结构,对MPPT、锁相环节及LCL滤波控制等展开研究,研究了MPPT的控制策略及流程,对LCL电路的结构和控制原理进行分析;对锁相环节控制环节分析,并给出了传递函数,也仿真了波形。发现系统能够实现最大功率点跟踪,且具有较好的稳定裕度和动态响应能力,可以为光伏逆变系统的设计提供参考。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
北京航空航天大学学报(2021年7期)2021-08-13
通信技术(2020年12期)2020-12-23
电动工具(2020年4期)2020-08-20
中国惯性技术学报(2019年3期)2019-10-15
电子制作(2019年15期)2019-08-27
自动化学报(2019年6期)2019-07-23
中国惯性技术学报(2019年6期)2019-03-04
舰船电子工程(2014年3期)2014-11-23
筑路机械与施工机械化(2014年4期)2014-03-01
