一种ANPC逆变系统七电平调制策略研究
2019-08-23 09:23耿后来顾亦磊
通信电源技术 2019年7期
耿后来,李 顺,顾亦磊
(阳光电源股份有限公司,安徽 合肥 230088)
0 引 言
多电平变换器能够实现更高电压和容量,且采用低电压器件降低了成本,同时具有降低系统谐波和开关损耗等优点,得到了广泛应用。传统二极管箝位式变换器存在母线电容电压难以平衡的问题,而电容钳位型多电平变换器虽然可以实现任意电平输出和所有电容的电压平衡控制,但需要使用数目众多的钳位电容,控制较复杂,严重影响整个系统的可靠性[1-3]。H桥级联型多电平变换器所用的功率器件较多,整机综合成本高[1-3]。
文献[4]提出了一种五电平有源中点钳位逆变器拓扑,见图1(a)。该结构在ANPC三电平的基础上增加一个飞跨电容模块,与传统拓扑结构相比,中点平衡的控制更简单,输出的电平状态更加灵活,可靠性更高。为提高效率,文献[5]提出了一种新拓扑,见图1(b)。此拓扑能保证大电流时导通的开关管从3个降低为2个。然而,此拓扑效率虽然获得了提升,但是其在高压情况下开关管Q1和Q6的应力较大,尚待优化。
本文针对光伏系统中有源中点钳位的应用展开研究,提出一种分时悬浮电压控制策略。低压时还是五电平调制策略,高压时使得逆变器处于七电平调制策略下工作,以便获得更好的实际效果。最后,通过仿真验证了所提七电平调制策略的正确性,通过实验验证了可行性。
1 ANPC逆变器原理

图1 五电平有源中点钳位逆变器拓扑
有源中点钳位(ANPC)变换器的一相桥臂如图1(b)所示。它不同于传统五电平拓扑,需每相有一个悬浮电容Cf,通过控制悬浮电容电压Ucf和母线电容C1和C2的电压组合形成5个电平。相对其他五电平方案,ANPC方案降低了成本和控制复杂度。
正常情况下,控制悬浮电容的电压值为UPV/4,母线正负电容C1、C2的电压均为UPV/2,通过8个不同开关矢量组合使得逆变器输出达到5个输出电平的目的,详细的各个开关矢量见表1。
其中,Q1的驱动S1与Q4的驱动S4互补,Q2的驱动S2与Q5的驱动S5互补,Q3的驱动S3与Q6的驱动S6互补,Q7的驱动S7与Q8的驱动S8互补。表1中,“1”表示开关管导通,“0”表示开关管关断。对于正半周期,可推导出输出电平的计算公式为:

当驱动S1为0时,对应驱动S4为1;当驱动S5为0时,对应驱动S2为1;当驱动S7为0时,对应驱动S8为1。其中,Q5的驱动S5的状态为:

式中:Uo为调制波信号。
以直流母线中点N为参考点,该电路输出电压VRN可以输出UPV/2、UPV/4、0、-UPV/4、-UPV/2五个电平,其中UPV/4、0、-UPV/4三个电平,各有两种冗余开关状态。
2 悬浮电容电压控制
2.1 现有五电平悬浮电容控制策略
ANPC逆变拓扑中,由于器件等原因会引起悬浮电容Cf的电压波动,而悬浮电容波动会影响逆变输出,因此必须继续控制悬浮电容的电压。从表1可以看出,有相同的输出电压电平(如UPV/4),而这些相同的输出电平是由不同的矢量(V2、V3)实现的。相同的矢量对悬浮电容的电压影响是相反的,因此通过控制这些相同的矢量,达到控制悬浮电容电压平衡的目的[4-6]。对于输出电平UPV/4,当输出电流为正时,矢量V2是对悬浮电容Cf进行充电,而矢量V3是对悬浮电容Cf进行放电,详细见图2。可推导知悬浮电容电压波动为:

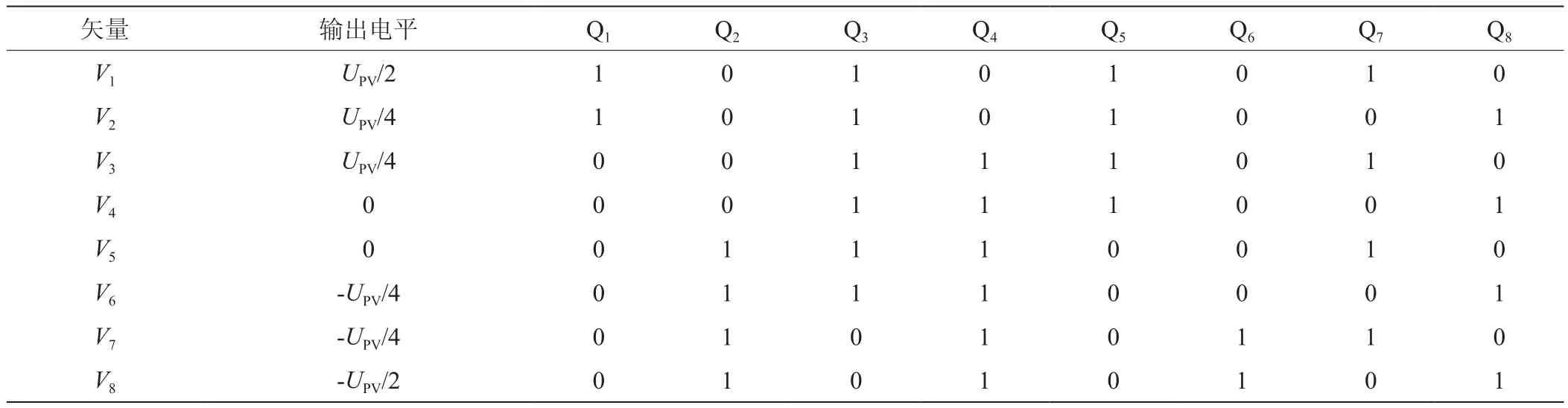
表1 五电平各个矢量及开关状态表
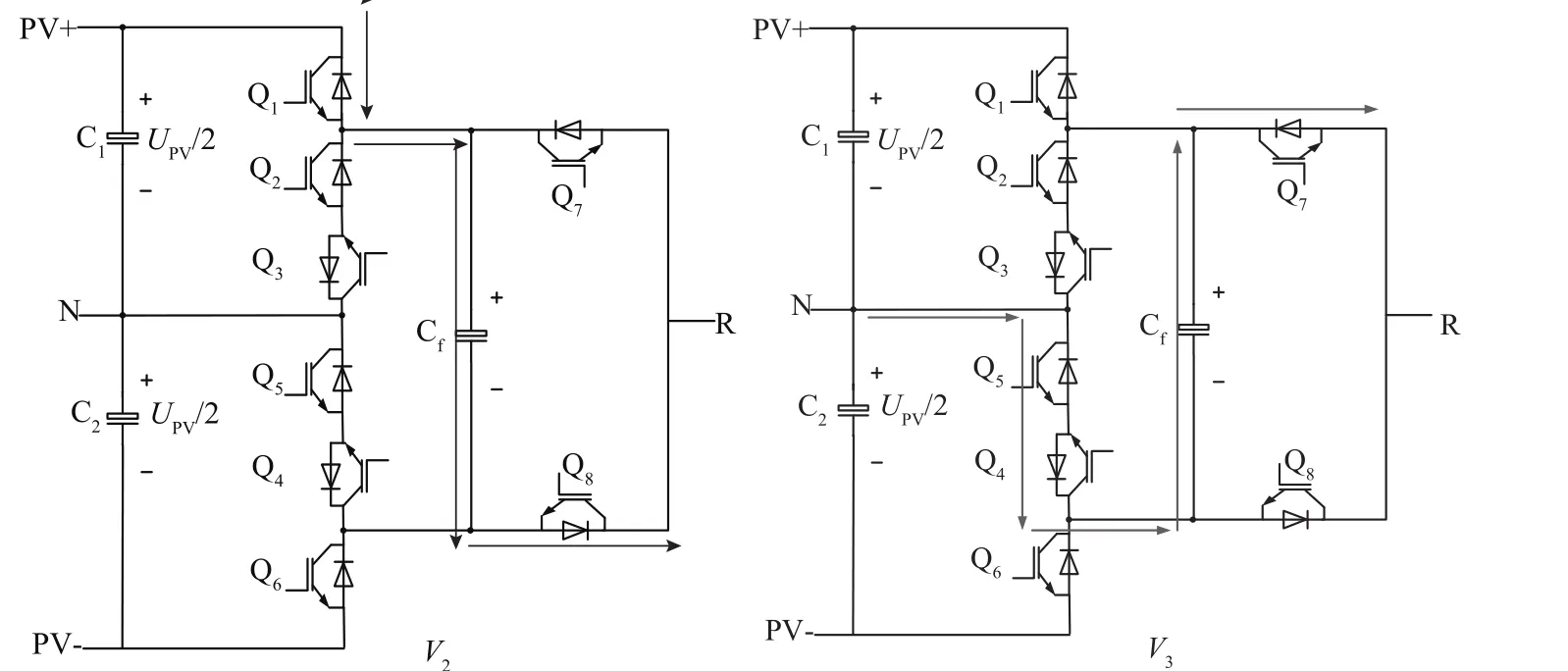
图2 冗余矢量V2和V3的流通路径
当驱动S1为0时,对应驱动S4为1;当驱动S7为0时,对应驱动S8为1。同理,当电流处于负半周期,矢量V6和矢量V7对悬浮电容的影响是一样的情况。因此,通过分析可知,依据电流方向,在正负半周期通过合适的选择不同矢量的切换状态,可以达到控制悬浮电容电压的平衡的目的,进而实现五电平输出。
2.2 新七电平悬浮电容控制策略
由图1可知,当高电压时,处于矢量V1时,Q6管承担的电压为:

同理,当矢量V7工作时,Q1管承担的电压为:

正常情况下,为保证高效率,开关管Q1和Q6的耐压不会选太高。如果串联开关管,不但系统效率会降低,而且开关管串联导致系统变得更复杂,因此需要在UPV较高时降低Q1和Q6的应力。本文提出一种高压七电平控制方案,即将UCf控制为高于UPV/4以上,以降低开关管Q1和Q6管应力。高压时,悬浮电容控制参考指令为:
UCf_ref=UPV/4+UPV×K (6)
其中,K为一较小比例,确保电容控制参考指令出现一定偏差。
然而,此时的输出电平电压则在UPV/4处有改变,矢量V2时为:

矢量V3时为:

依据表1、式(6)和式(7),整个矢量调制波形如图3所示。可以看出,新调制策略下,输出电平达到输出7个电平,同时开关管Q1和Q6的应力实现了降低。
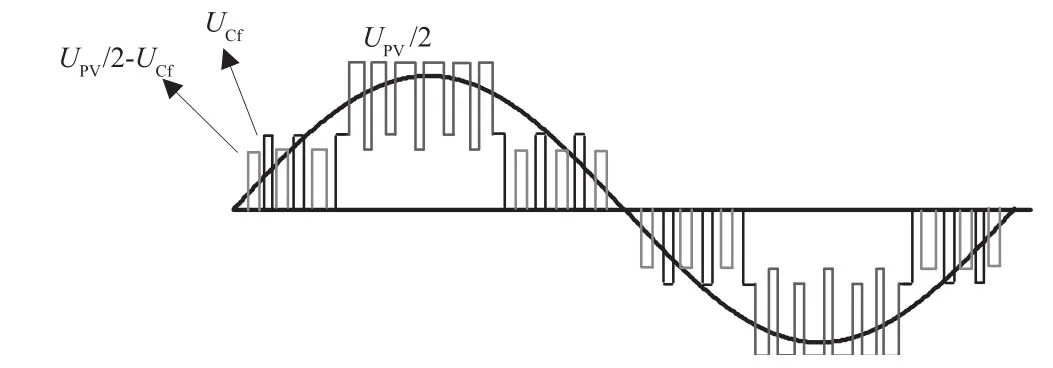
图3 新调制策略下输出电平示意图
3 仿真及实验验证
3.1 仿真结果及分析
为了验证所提出的五电平电路拓扑的七电平调制算法的理论分析的有效性,对所提出的算法利用MATLAB/SIMULINK软件进行仿真。其中,母线电压设置为较高的电压1 400 V,正负母线电容设置为2 400 μF,悬浮电容容值为250 μF,控制悬浮电容电压为400 V,直接并入电网。
图4和图5为仿真的桥臂输出电压VRN和电网电压波形。可以看出,悬浮电压在400 V附近,桥臂输出电压VRN有7个电平,分别为700 V、400 V、300 V、0 V、-300 V、-400 V、-700 V,符合理论分析。
3.2 实验结果及分析

图4 输出电压
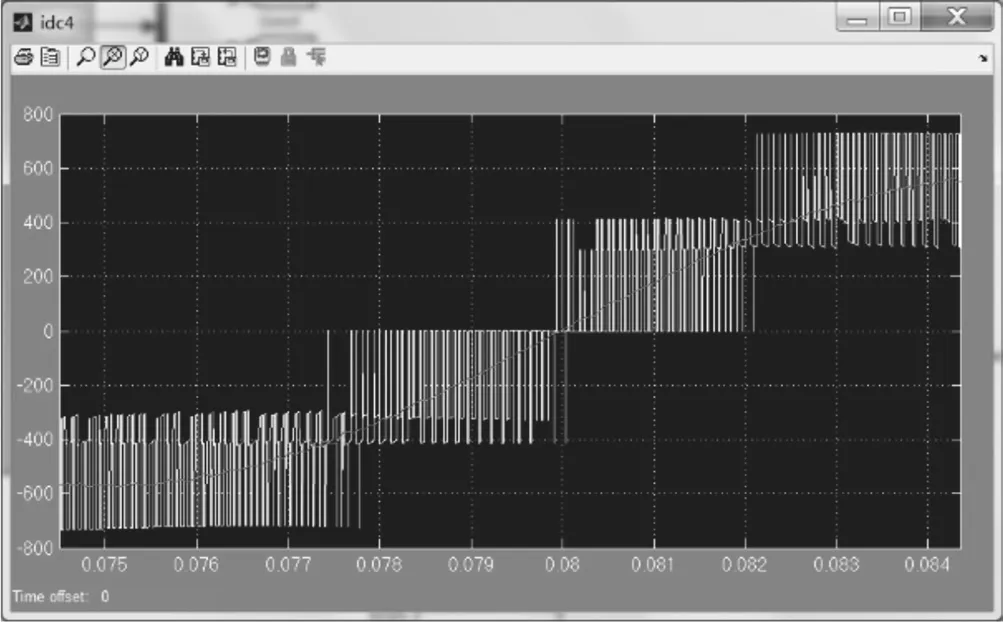
图5 电网电压的仿真波形
实际实验参数和控制需求和上述仿真相同,实验平台控制核心采用DSP芯片TMS320F28374S+LATTICE的FPGA芯片,其中FPGA主要用于PWM信号扩展及逻辑电平处理,开关器件采用IGBT,母线电压为1 400 V,悬浮电容电压参考设置为400 V,开关频率16 kHz。上下母线电容容值为2 400 μF,悬浮电容容值为 250 μF。
图6、图7为实际实验的桥臂输出电压VRN波形,其中通道1波形为输出电压VRN的波形,通道2为电网电压波形。可以看出,悬浮电压在400 V附近,桥臂输出电压有7个电平分别为700 V、400 V、300 V、0 V、-300 V、-400 V、-700 V,符合设计要求。实验结果表明,本文提出的七电平调制策略符合设计要求。
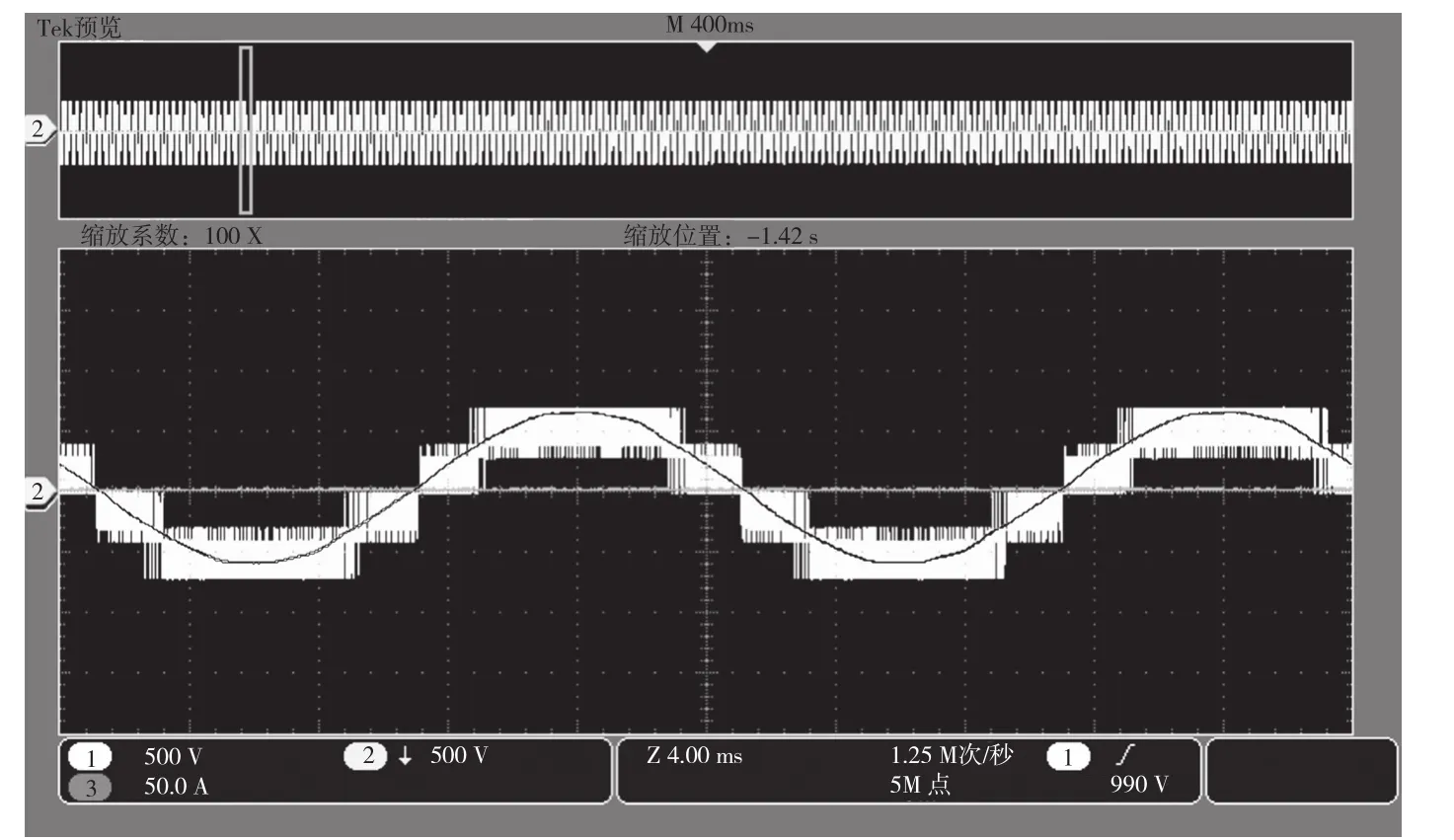
图6 硬件输出电压的波形
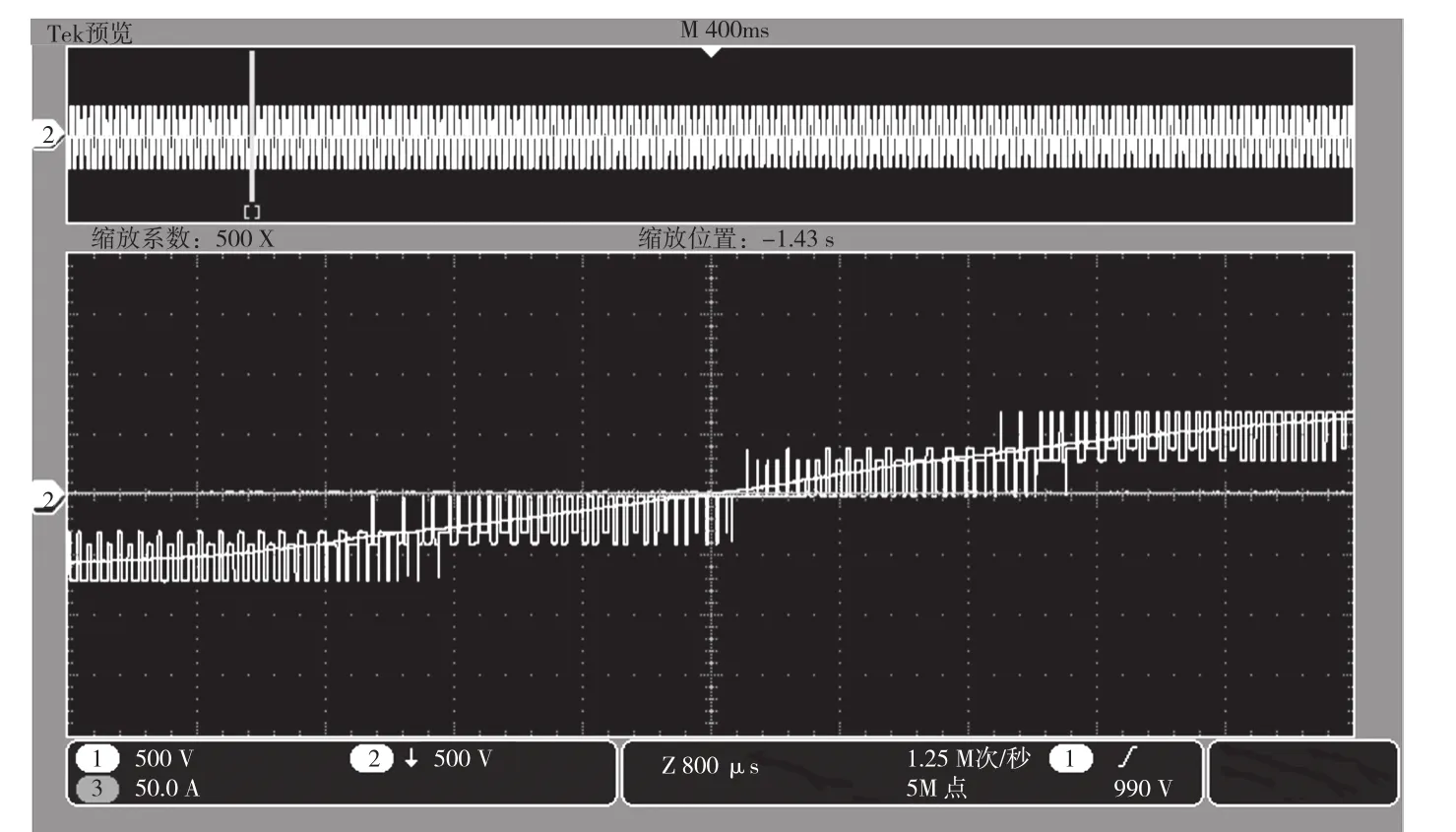
图7 硬件点位电压的波形
4 结 论
本文介绍了五电平ANPC逆变器的工作原理,研究了现有悬浮电容控制方案,并针对较高电压情况提出了一种悬浮不平衡控制策略,使得优化后的五电平逆变器能处于七电平调制策略运行。仿真及实验结果对照分析,验证了该控制策略的有效性。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2021年3期)2021-07-21
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
电子制作(2018年19期)2018-11-14
电子制作(2018年19期)2018-11-14
电子制作(2017年7期)2017-06-05
电子制作(2017年10期)2017-04-18
现代防御技术(2016年1期)2016-06-01