
基于升降套筒体积调整的海蟹养殖定量投饵机设计
2019-08-23 02:16胡海刚张林伟钱云霞
农业工程学报 2019年13期
胡海刚,唐 潮,张林伟,张 刚,钱云霞
基于升降套筒体积调整的海蟹养殖定量投饵机设计
胡海刚1,唐 潮1,张林伟2,张 刚1,钱云霞3
(1. 宁波大学海运学院,宁波 315211;2. 宁波城市职业技术学院,宁波 315100;3. 宁波大学海洋学院,宁波 315211)
为满足工厂化循环水养殖的需要,该文通过触摸屏后端控制单片机升降套筒调整体积定量设计了一套自动投饵机,克服了常用称重法的精度易受振动影响、行走式投饵设备称质量和行走不能同时进行的缺点,在保证性能的同时简化了结构、提高了效率。对系统投饵精度性能测试结果表明:该系统能够定时完成启停和控制过程,在设定投饵量在5~7 g/次时,误差控制在8%以内;设定投饵量在9~13 g时,误差不超过4%,可以满足工厂化海产养殖的需求。该研究可为今后海蟹类单筐养殖科学化、智能化提供参考价值。
水产养殖;设计;工厂化循环水;投饵机;自动投饵
0 引 言
近年来,中国水产养殖业逐渐从传统的粗放养殖发展到工厂化循环水养殖[1-3]。节水节地的集约化养殖模式给人工投喂方式带来了挑战,其投饵量凭养殖户经验确定,不能根据螃蟹的摄食量和体质量相应变化[4-5],极易造成饵料浪费,增加了养殖成本,同时残饵导致养殖水环境恶化、病害发生机率增加,更直接损害消费者的生命健康[6-8]。再加上城市化的进程加快,劳动力价格剧增,实现饵料的定量自动投喂成为发展的必然趋势[9]。
体积法定量的原理是将饵料的密度近似为定值,当饵料充满设定容积时便可换算为对应的饵料质量[10]。国外智能化投饵起步较早[11],也已经实现了饵料投放方面的数量控制[12-13],如美国ETI公司的oFEEDMASTER 自动投饵系统[14]和上世纪九十年代日本开发的YDF系列定量投饲机[15],定量部分由打有通孔(或气密腔室)的旋转盘在电机的驱动下进行回转运动,先后联通下料口和散料口实现定量投饵。该装置可以通过控制转速实现有级变量,但旋转盘与上下端面接触面积较大,加工精度高,成本高。
国内学者也对投饵设备进行了研究,有学者采用称重的方法确保定量[16-17],精度受工作环境如振动、摇摆等影响较大。体积法应用较少,孙月平等[18]设计了一种由喂料电机带动旋转叶轮实现定量的投饵机,并通过控制电机转速调整投饵量。周晓林等[19]设计了一种定量板式下料机构,电磁铁拉动充填定量饵料的定量板,使板上开孔正对散料口,完成定量投饵。其优点是结构简单,造价较低,缺点是依靠通孔的尺寸保证定量,无法调整投饵量,加上电磁铁往复运动频繁,震动和噪音较大,线圈寿命较短甚至有漏电隐患[20];邓素芳等[21]、徐志强等[22]采用精密定量搅龙排料投饵方案,饵料用电控启停的旋转螺杆推动饵料前进,根据旋转时间的长短保证饵料的定量供给,优点是可无级调整设定投饵量,其缺点是螺杆及其端面对于机械加工精度要求较高,价格昂贵,损坏后难修复[23]。李康宁等[24]设计了利用旋转叶轮和端盖容积保证定量的投饵机,通过控制叶轮旋转角度调整投饵量,但叶轮容积固定只能呈倍数增减,定量精度不高。
此外,“订单化”养殖模式是工厂化海蟹养殖的未来探索方向之一。海蟹的计划养殖、计划供应有利于养殖场按照订单需求提供不同生长阶段的商品蟹,实现错季节、错峰销售,缓解高峰期价格和需求波动[25-26]。这就要求一种结构简单、维护方便、成本低廉并且可以根据海蟹的不同生长阶段随时调整饵料设定量的投饵设备。从这个需求出发,本文提出一种基于升降套筒控制投饵定量的自动化下料方案,通过调整中间储料套筒的体积改变设定投饵量,不存在高速运动的摩擦副、难修复的精密结构和称重单元,降低了结构的复杂程度,避免了行走振动给投饵精度造成的影响,实现蟹类自动化养殖。
1 投饵机工作原理及运动分析
1.1 投饵机结构及工作原理
投饵机整体结构如图1所示,整套投饵系统由机架、储料机构、可伸缩下料筒、上下控制门开合机构、剪叉升降机构和控制系统组成, 并基于单片机进行自动控制,触摸屏实现人机交互操作。储料斗内储存多次投饵所需的饵料,光电传感器持续检测料位。

1. 料斗 2.机架 3. 触摸屏4. 下料筒(固定端) 5. 下料筒(活动端) 6.下位电机7. 中位电机 8. 剪叉升降机构 9上位电机 10.瞭望口及光电传感器
表1给出了系统主要部件的参数,下料筒容积范围主要依据梭子蟹养殖周期所需投饵量制定。
表1 系统部件参数
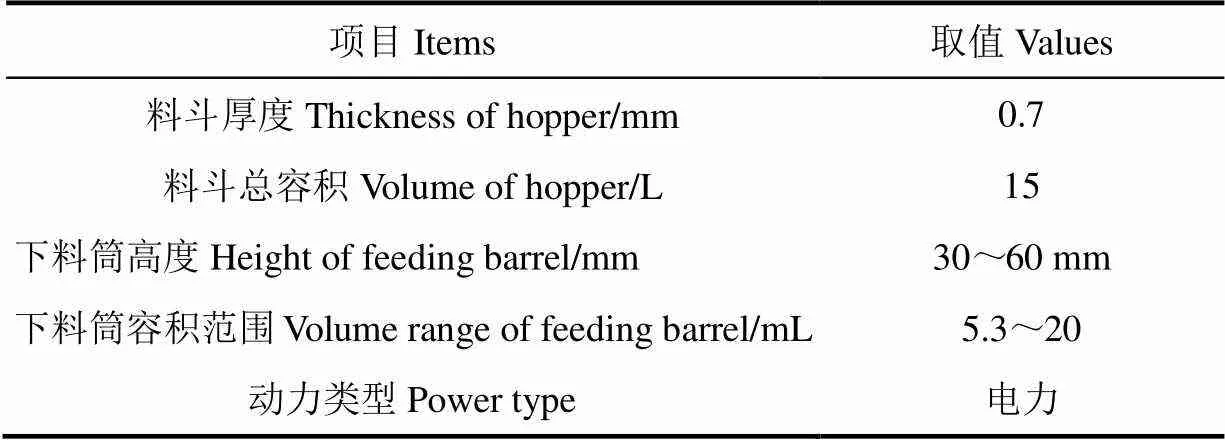
Table 1 Parameters of feeding system
系统工作原理如图2,图2a为投饵机的投饵量设定工况,Ⅰ为系统的初始位置,上下两阀门保持关闭。由触摸屏设定单次投饵量,单片机收发信号使中位电机动作,电机旋转带动剪叉收缩,下料筒固定端与活动端围成的有效容积减小,实现可变定量投饵。图2b表示投饵工况,每次工作前料位光电传感器检测储料斗是否有料。若有料,Ⅰ)单片机控制高位电机动作拉开上阀门,粉料落入下料筒内;Ⅱ)待上阀门开启时间达到设定时长确保下料筒内饵料装满后,上阀板关闭;Ⅲ)开启下阀板进行定量散料;Ⅳ)最后关闭上阀门,系统回归初始位置。
1.2 投饵机运动分析
假设在下部套筒抬升时,各个活动部件平面运动分析如图3,对连杆做速度分析,可以确定瞬心的位置。根据瞬心的性质,可以得出:



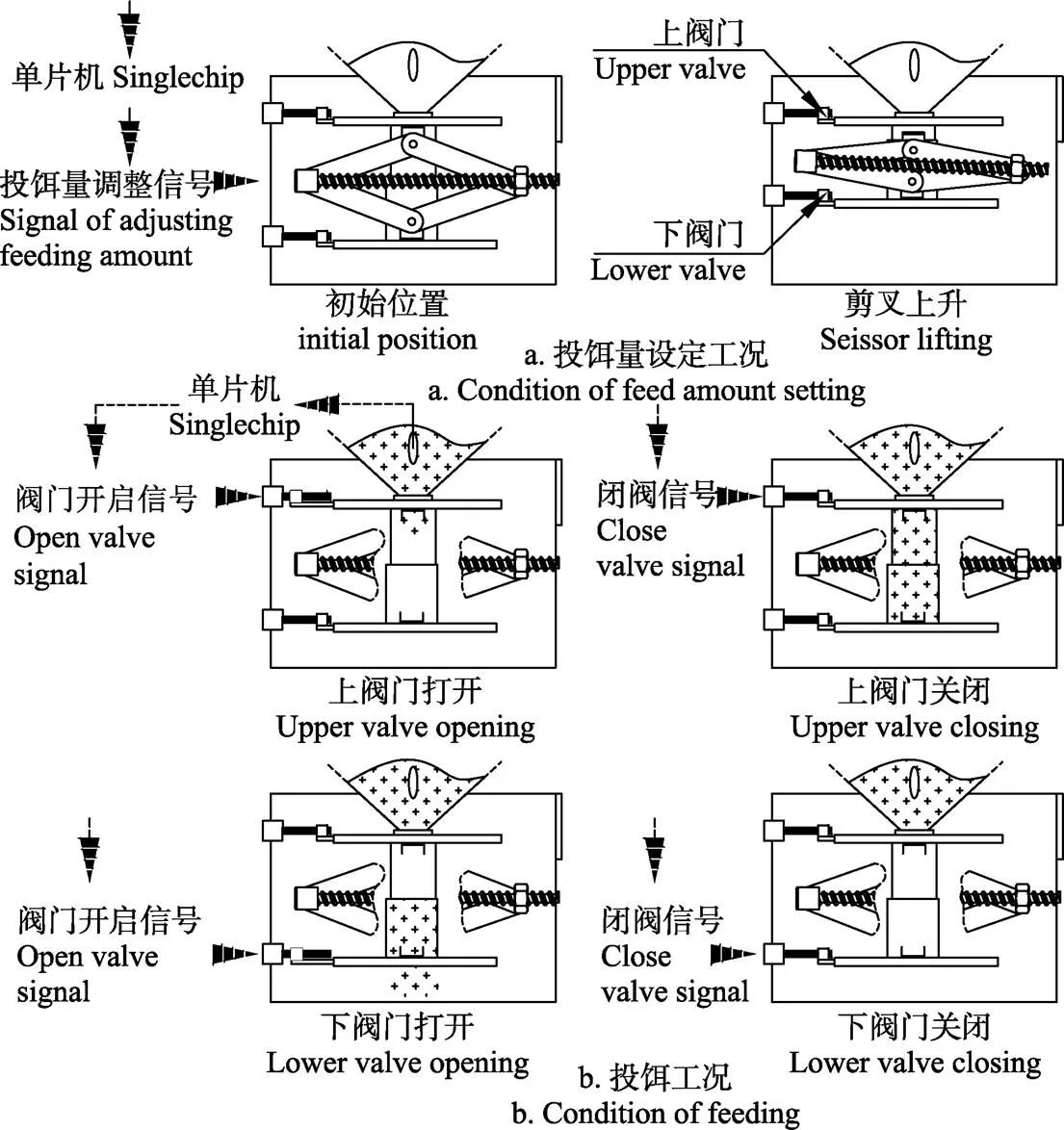
图2 投饵机工作原理图

注:中位电机对地速度为ν1,沿水平和竖直方向分解的速度分别为ν1x和ν1y,下料筒(活动端)速度为νf,连杆B与水平方向的夹角为α,连杆B的长度为l。
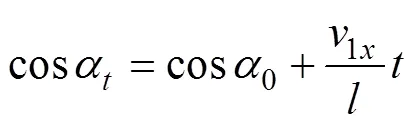
存在关系:

两边对1求导并化简后得出:

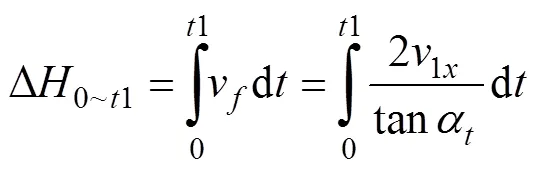
两边积分,得出:
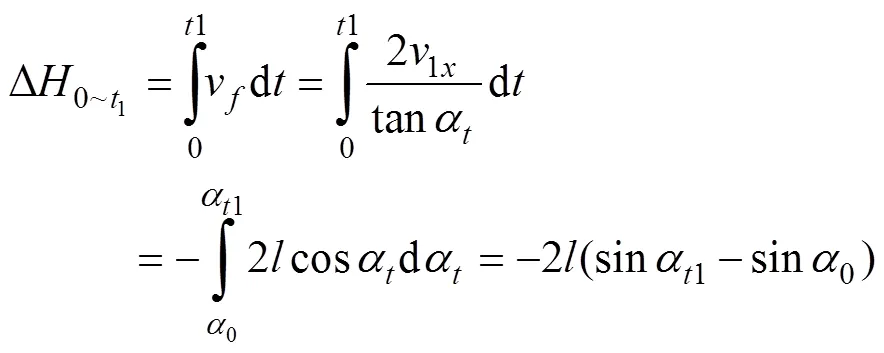
其中,


由于可调体积等于下料筒活动端有效高度乘以底面积,故

由于直线电机进给速度1x等于电机转速乘以螺距,对于固定系统来说1x大小恒定。
依据式(10),可按照设定的体积改变量求出电机运转的时间1,保证定量位置。
2 硬件设计
2.1 剪叉升降机构
下料筒活动端升降时采用双边剪叉机构,活动端与固定端对中良好,运动流畅。将单边剪叉机构简化为平面四杆机构,如图4对连杆进行受力分析,忽略其质量可以视为二力轻杆,边界受力大小相同方向相反,分别为1及2,1的竖直分量克服1/4负载,并在电机动力下完成升降。受力大小存在以下数学关系:

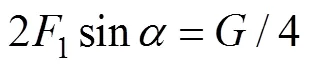

联立化简得出:
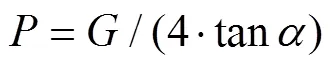
因此,为保证工作可靠,在设计时尽量增加初始夹角的正切值,减小电机负载。
2.2 控制系统设计
控制系统主要包括独立的配电箱和控制器组成。配电箱中主要安放步进电机的电机驱动器、电源、熔断开关等;控制器主要包含单片机、触摸屏、信号转换模块、远程通讯模块等,系统功能的实现框图如图5所示,工控机连接多台投饵机,每台投饵机由触摸屏后端控制,由单片机实现自动化投饵。
定量投饵功能由3个步进电机执行,其一实现下料筒的伸缩,其余负责实现下料筒上下阀门的开合。投饵采用膨化或颗粒饲料,饵料轻软易碎,下料筒是铝制材料,质量较轻,结合成本综合考虑,选取成本较低的86BYGH两相混合式步进电机,型号为42BYGH48- 401A。

注:料筒活动端及内部饵料的总重力为G,连杆B的两端受力分别为F1和F2,F3是与B相邻的连杆一端受到的压力,α为连杆B与水平面的夹角。
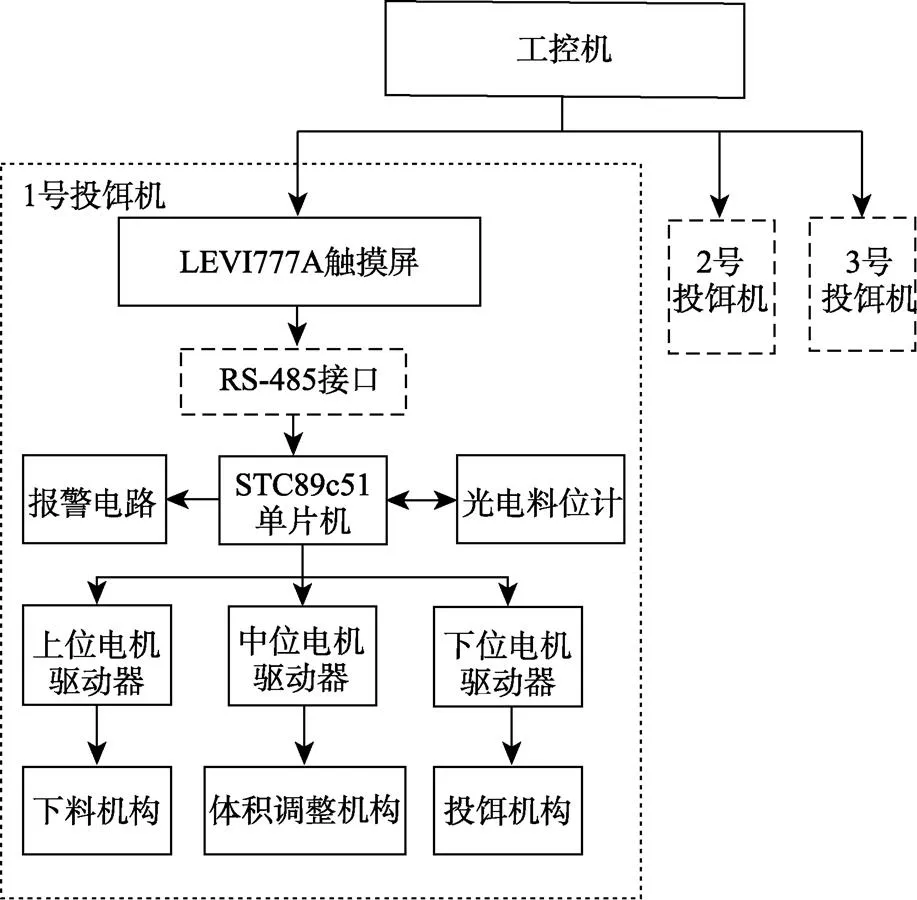
图5 海蟹定量投饵机控制系统框图
STC89c51单片机具有结构简单、价格低廉、使用可靠、操作方便、通用性强等特点[27],符合自动投饵系统对单片成本低廉、操作简单、可靠性高的需求,因此控制系统选用STC89c51单片机作为主控制芯片[28],利用RS-485通信接口与触摸屏进行双向数据通信,利用I/O口脉冲控制步进电机驱动器。系统运行时,首先控制器接收触摸屏数据帧,得到具体控制参数,如投饵时间、投饵量等,利用单片机片内时钟产生特定频率的脉冲信号通过L298N电机驱动器驱动步进电机产生预期的步距角,当步进电机连续接收脉冲时将能够持续稳定运行[29]。同时通过脉冲极性调节,可以实现步进电机的双向运行,实现下料控制门的自动开合。投饵系统每完成一次投饵动作,控制器会将已完成的投饵量数据上传给触摸屏界面进行显示,并实时反映控制系统的工作状态。当全部投饵作业量完成后,系统进入定时待机状态,下一次投饵时刻到达后,系统重新启动运行。
控制系统逻辑图如图6所示,其中S、R分别为置位和复位触发器:当S输入一个脉冲,输出为高电平;当R输入一个脉冲,则输出低电平。AND为与门,当所有的输入同时为高电平时,输出才为高电平,否则输出为低电平;OR为或门,只要输入存在高电平,输出即为高电平。图中包括型号为STC89c51的单片机、MAX485芯片、L298N驱动器、步进电机等。步进电机驱动原理图见图7,输入信号主要有3路:步进脉冲信号PUL、方向电平信号DIR、使能电平信号EN。同时还可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和正反转的目的。

注:S、R为置位和复位触发器;AND为与门;OR为或门。

图7 电机驱动原理图
触摸屏采用维控LEVI777A型通用人机界面,工作电压24V,通过RS-485接口与单片机控制器进行通信,完成投饵系统的参数设定和控制。
3 软件设计
触摸屏中自带组态软件,本系统触摸屏操作系统使用维控触摸屏配套的Levi studio组态开发[30]环境进行编写。
触摸屏主要包括参数设置、工作状态、历史数据查询、帮助4大功能界面。参数设置界面可以对整个系统所有运行的参数进行设置,例如投饵量的设置、步进电机转速和正反转的设置等;工作状态界面是显示当前系统工作运行的状态,显示当前电流、电压及各部分运行情况;历史数据查询界面可以查找之前所有执行过的投饵状态,例如投饵时间、投饵量等;帮助界面可以为用户提供系统的具体操作方法,系统使用的注意事项等等,帮助新用户熟练地运用该系统,系统人机界面如图8所示。
系统中所使用的LEVI777A工业级触摸屏有2个COM接口,支持RS-232和RS-485通信,同时带有USB接口支持在线调试和程序下载功能。由于单片机与触摸屏的通信距离在1 m以内,因此可以使用RS-485接口进行异步串行通信。工业触摸屏内部提供了用户自定义协议拓展功能,在串口通信中使用自定义协议进行串口控制程序编写较之使用工业标准协议更为简便,自定义协议数据格式,每帧数据占10位,包括起始位、数据位和校验位,数据校验采用奇偶校验法。

图8 人机界面图
触屏串口接收数据并进行数据校验,同时内部脚本程序循环执行,截取有效数据位数据进行数据处理,形成相应的触发指令和返回指令。触发信号引起的动作包括触屏界面中状态灯的状态切换,以及数据显示框中数值的变化。返回指令数据格式同上,包含步进电机参数调整数据。软件界面的设置是基于触摸屏自带软件组态形成,具体参数设置和命令执行是通过C语言来编写程序完成的。
系统投饵过程流程图如图9所示。

图9 定量投饵系统工作流程图
4 试验设计与结果分析
4.1 试验环境
系统性能试验于2016年3月在宁波市象山鑫亿鲜活水产有限公司的梭子蟹单筐养殖基地进行。在设计自动投饵系统定量投饵试验时,考虑到饵料在实际工厂化养殖中直接抛入水中而无法称量,故可在养殖池不蓄水的前提下,用其他容器收集投放的饵料,也便于测量系统投饵量的精度[31]。
投饵系统由单片机控制,单片机自身的时钟信号由内部振荡方式取得。在引脚外接晶振振荡器或陶瓷谐振器,就构成了单片机的内部振荡方式[32],可以按照之前设置的投饵时刻,准确无误地进行定时投饵,几乎不会有误差,因此设计试验着重测试投饵设备的定量精度。
4.2 定量性能测试
在工厂化海蟹(以三疣梭子蟹为例)单筐养殖时,当三疣梭子蟹成长到V期后才会进行单筐养殖,初期三疣梭子蟹个体质量平均为70 g,个体投饵量大约在占质量的8%~10%,后期梭子蟹平均体质量300 g,对应投饵占比为5%~8%[33]。故试验按照市场需求和量程设计,最小投饵量为5 g/次,设置梯度至最大投饵量为13 g/次,每个梯度投放20次,收集每次投放的饵料,用称重仪进行称量并与设定投放量进行比较,计算误差百分数,验证该自动投饵系统定量投饵的可行性。按照以上方法进行试验并获得5个梯度共100个试验数据,测得的试验结果如图10所示。
由图10中的试验数据可以看出,在设定投饵量5~13 g范围内,总体相对误差控制在8%以内,能够满足工厂化海洋蟹类单筐养殖自动投饵系统定量投饵性能的需求,达到定量投饵的目的。

图10 投饵机定量精度测试结果
4.3 结果与分析
由图10的试验数据可知,投饵量精度上存在一定的误差。当投饵量在5~7 g时,误差可以控制在8%以内;当投饵量在9~13 g时,误差则不超过4%。误差会随着投饵量的增加而逐步减少,但是总体上误差可以控制在8%以内,占梭子蟹体质量的1~1.25%,按照70 g幼蟹摄食量占体质量波动范围2%[33-35]计算,投饵精度可满足工厂化水产养殖行业的需求。经过分析认为,产生误差的主要原因包括3个方面:
1)饵料因在潮湿的环境中极易受潮而发生黏结,在下料的时候可能会结块,使下料筒填充不满。
2)有的饵料的形状不规则,在填充下料筒时会出现空隙过多的现象,一定程度上会影响投饵量的精度。
3)下料筒的加工精度上还存在不足。随着投饵量的减少,产生的误差会相对增大。该系统更适合水产养殖后期,饵料需求量较大,单次投放量较多的情况。后续在饵料加工方面有所改善,该系统的自动投饵量精度会再度提高。
5 结 论
该文基于单片机、触摸屏、可变体积的下料筒设计了一种适用于工厂化水产养殖的自动定量投饵系统。系统连接维控触摸屏人机界面,通过自带软件设计控制显示界面,实现集自动投饵、监测、控制于一体的人机界面设计,达到智能控制投饵系统的目的。在养殖基地实地考察研究,根据工厂化养殖需求,设置系统定量投饵性能试验方案:设计5组梯度投饵试验,设定范围自5 ~13 g/次,每组重复试验20次,对抛洒的饵料称质量、记录并计算误差。试验数据表明,即使是在单次投饵量较小的情况下,误差最大值仍保持在8%以内,占梭子蟹体质量的1%~1.25%,按照70 g幼蟹摄食量占体质量波动范围2%计算,投饵精度可满足工厂化水产养殖行业的需求,系统总体设计方案有效可行,能较好地满足自动定量投饵,实现工厂化水产的自动化、智能化养殖,降低养殖成本,提高海蟹品质。
[1] 刘思,俞国燕. 工厂化养殖自动投饵系统研究进展[J].渔业现代化,2017,44(2):1-5. Liu Si, Yu Guoyan. Progress of research on automatic feeding system in factory aquaculture[J]. Fishery Modernization, 2017,44(2):1-5. (in Chinese with English abstract)
[2] 曲克明,杜守恩. 海水工厂化高效养殖体系构建工程技术[M]. 北京: 海洋出版社,2010:1.
[3] 姜中蛟. 我国海水工业化养殖产业发展对策研究[D]. 大连:大连海洋大学,2018.Jiang Zhongjiao. Industry Development Strategy Research for Marine[D]. Dalian:Dalian Ocean University,2018. (in Chinese with English abstract)
[4] 庄保陆,郭根喜. 水产养殖自动投饵装备研究进展与应用[J]. 南方水产,2008,4(4): 67-72.Zhuang Baolu, Guo Genxi. The evolution and application of automatic feeding system in aquaculture[J]. South China Fisheries Science, 2008, 4(4): 67-72. (in Chinese with English abstract)
[5] 杨正宽,方怀义,雷宁,等. 拟穴青蟹养殖技术要点及养殖模式优劣分析[J]. 水产养殖,2019,40(3): 19-21.
[6] Aarseth K A , Perez V , Boe J K , et al. Reliable pneumatic conveying of fish feed[J]. Aquacultural Engineering, 2006, 35(1):14-25.
[7] 徐皓,刘兴国,吴凡. 池塘养殖系统模式构建主要技术与改造模式[J]. 中国水产,2009(8): 7-9.
[8] 王兴礼,叶志慧. 鱼类健康养殖的技术措施[J]. 内陆水产,2008,33(6): 8-9.
[9] 罗锡文,廖娟,胡炼,等. 提高农业机械化水平促进农业可持续发展[J]. 农业工程学报,2016,32(1): 1-11. Luo Xiwen, Liao Juan, Hu Lian, et al. Improving agricultural mechanization level to promote agricultural sustainable development[J]. Transactions of the Chinese Society of Agricultural Engineering (Toransactions of the CSAE), 2016,32(1): 1-11. (in Chinese with English abstract)
[10] 宁波大学. 一种定量下料装置及使用该定量下料装置的投饵机: 2015202366298.6[P]. 2015-08-05.
[11] 彭树锋,王云新,叶富良,等. 国内外工厂化养殖简述[J].渔业现代化,2007,34(2):12-13.
[12] Chada T, Mrobinson S, Barbaros C, et al. Design of a 20-ton capacity finfish aquaculture feed buoy [C]// Oceans. IEEE, 2007: 1-6.
[13] Tsunoda T, Kitazawa D, Kinoshita T, et al. Concept of an offshore aquaculture system with an automated feeding platform[C]//ASME 2008, International Conference on Offshore Mechanics and Arctic Engineering. 2008: 527-534.
[14] 庄保陆. 远程气力输送自动投饵技术与装备的研究[D].上海:上海海洋大学,2008.Zhuang Baolu. Study on the Design of the Centralized Air-powered Feed Systems[D]. Shanghai:Shanghai Ocean University, 2008.(in Chinese with English abstract)
[15] 方荣楠. 日本开发养鱼省力化设备[J]. 渔业现代化,1992,19(6): 9-12.
[16] 王志勇,谌志新,江涛,等. 标准化池塘养殖自动投饵系统设计[J]. 农业机械学报,2010,41(8):77-80. Wang Zhiyong, Shen Zhixin, Jiang Tao, et al. Design of automatic feeding system in standardization pond culture.[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(8): 77-80. (in Chinese with English abstract)
[17] 袁凯,庄保陆,倪琦,等. 室内工厂化水产养殖自动投饲系统设计与试验[J]. 农业工程学报,2013,29(3): 169-176. Yuan Kai, Zhuang Baolu, Ni Qi, et al. Design andexperIments of automatic feeding system for indoorindustrialization aquaculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(3): 169-176. (in Chinese with English abstract)
[18] 孙月平,赵德安,洪剑青,等. 河蟹养殖船载自动均匀投饵系统设计及效果试验[J]. 农业工程学报,2015,31(11):31-39. Sun Yueping, Zhao De’an, Hong Jianqing, et al. Design of automatic and uniform feeding system carried by workboat and effect test for raising river crab[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(11): 31-39. (in Chinese with English abstract)
[19] 周晓林, 焦仁育, 胡亚东. 自动投饵系统设计[J]. 渔业现代化, 2005(6):41-43.
[20] 焦仁育. 投饵机下料机构现状分析[J]. 河南水产, 2011(1): 23-24..
[21] 邓素芳,杨有泉,陈敏,全自动饵料精量投喂装置的研究[J]. 农机化研究,2010,32(11):103-105.Deng Sufang, Yang Youquan, Chen Min. Automaticquantitative bait feeding device[J]. Journal of Agricultural Mechanization Research, 2010, 32(11): 103-105. (in Chinese with English abstract)
[22] 徐志强,王涛,鲍旭腾,等. 池塘养殖自动投饲系统远程精准化升级与验证[J]. 中国工程机械学报,2015,13(3):272-276. Xu Zhiqiang, Wang Tao, Bao Xuteng, et al. Accurate upgrading and verification on automatic remote feeding system for pond culture[J]. Chinese Journal of Construction Machinery, 2015,13(3):272-276.(in Chinese with English abstract)
[23] 徐皓,刘兴国,田昌凤,等. 详解渔业投饲机械(上)[J]. 科学养鱼,2017(1):82-83..
[24] 李康宁,李南南,刘利,等. 淡水网箱养殖自动投饵机设计[J]. 河北渔业,2018(4):48-51.
[25] 蔡宁,尚丹,王莹,等.“订单农业”经营模式在现代农场发展过程中存在的问题研究[J/OL]. 河北农业科学,[2019-04-17].https://doi.org/10.16318/j.cnki.hbnykx. 2018-05-019.
[26] 蒋元方,袁荣干. 订单渔业: 促进渔民稳定增收的又一利器:江苏省姜堰市订单渔业发展状况调查[J]. 中国水产,2010(11): 26-27.
[27] 马昊伟,董继先. 基于STC89C51单片机的步进电动机的控制系统设计[J]. 煤矿机械,2012(7): 222-223.
[28] 楼然苗. 51系列单片机课程设计指导[M]. 北京:北京航空航天大学出版社,2016.
[29] 孟英红,齐婉玉,段学锋. 用L297,L298组成步进电机驱动电路[J]. 仪器仪表学报,2003,24(Z2): 573-574. Meng Yinghong, Qi Wanyu, Duan Xuefeng. Use L297 and L298 building a stepper motor driver circuit[J]. Chinese Journal of Scientific Instrument, 2003, 24(Z2): 573-574.(in Chinese with English abstract)
[30] LEVI STUDIO 2009版本手册[M]. LEVI HMI开发组,2009.
[31] 郝明珠,徐建瑜,王春琳,等. 梭子蟹单筐养殖自动投饲系统设计与试验[J]. 渔业现代化,2015,42(2): 20-23.Hao Mingzhu, Xu Jianyu, Wang Chunlin, et al. Design and experiments of automatic feeding system for the single-basket culture of Portunus trituberculatus[J]. Fishery Modernization, 2015, 42(2): 20-23. (in Chinese with English abstract)
[32] 赵瑞林. 基于单片机控制步进电机恒变速系统的设计[J].计算技术与自动化,2013,32(3): 37-40.Zhao Ruilin. Based on singlechip stepper motor control system design of constant speed[J]. Computing Technology & Automation, 2013, 32(3): 37-40. (in Chinese with English abstract)
[33] 沈烈峰,洪挺,顾建明,等. 三疣梭子蟹单体筐立体养殖技术研究[J]. 河北渔业,2013(4): 14-15.
[34] 杨辉. 三疣梭子蟹(Portunus trituberculatus)投喂技术的研究[D]. 青岛:中国海洋大学,2010. Yang Hui. Studys on Feeding Technology of Crab (Portunus trituberculatus)[D]. Qingdao: Ocean University of China, 2010. (in Chinese with English abstract)
[35] 原永党,孙本腾,毕复永,等. 梭子蟹池塘沉箱式单养试验[J]. 海洋湖沼通报,2002(3):80-84.
Design of quantitative feeding machine for sea crab cultivation based on volume adjustment of lifting sleeve
Hu Haigang1, Tang Chao1, Zhang Linwei2, Zhang Gang1, Qian Yunxia3
(1.3152112.3151003.315211,)
There are many uncertain factors in the amount of artificial feeding, which cause the waste of bait easily, moreover, a huge labor cost. The author briefly introduces the research status of automatic feeding machine at home and abroad, and points out that the existing quantitative feeding machine cannot take both the structural simplicity and functional perfection into account. Aiming at the complex structure and expensive price of the volume quantitative baiting machine, the author studies and designs a simple baiting machine for marine crabs. In the modern factory circulating aquaculture system, each crab is placed in separate baskets. Its amount of feeding and feeding time are strict, which needs to be adjusted according to the weight and food intake of the crabs. As a result, the designed feeding machine must have a stepless adjustment according to the real-time status of the breeding objects with the ability that can vary the amount of bait, simple structure, stable performance and easy maintenance. Therefore, based on the principle of variable volume method, this paper designs an automatic feeding system for single-cage culture sea crabs with a strong anti-interference ability, which overcomes the shortcoming that the accuracy of quantitative weighing method is susceptible to vibration. The author introduces the basic structure and basic working principles of this system. The whole feeding system consists of hopper, rack, lower barrel, lower barrel, motors, Scissor mechanism and control system. When the MCU sends the start command, the upper and lower valves remain closed, and the material level photoelectric sensor detects whether the storage hopper has material. If there is material, the upper motor moves to open the valve plate between the storage hopper and the lower barrel, and the baits fall into the lower barrel. After the barrel is filled with bait, the upper valve plate is closed and the lower valve plate is opened for feeding, when the single chip transmits a signal for adjusting the amount of the feed, the middle motor operates to change the total volume of the lower cylinder by varying the height of the lower barrel, thereby realizing variable quantitative feeding. The programming controller (microcontroller) performs automatic control, and the touch screen realizes human-computer interaction operation. Then with combination of theoretical calculation, the paper determines the relationship between different quantitative volumes and motor control time. The second chapter optimizes the scissor lift mechanism to obtain the most efficient initial angle. The article also designs the control system, introduces the composition of the control system and the selection of the execution motor, details the operation of the control system during the work process, and briefly introduces the hardware of the human-computer interaction interface. Combined with automatic feeding system control circuit of the mater controller, it realizes the intelligent control of the entire automatic feeding system, leads to the system to be more convenient and intelligent. As for software, an interactive software is designed to implement functions such as parameter setting, working status, historical data query, and help interface, which helps new users quickly master the use of the feeding machine. Based on the automatic feeding systems for single basket of crabs breeding, the author experimented in Xinyi fresh aquatic Ltd. (Xiangshan, Ningbo) to test the function of casting bait at accurate time and quantity. After experiment, the performance test of the precision error of the feeding system shows that the design scheme is effective and feasible. On the premise of precise time point, the system can control the average error of feeding accuracy to less than 8%, which meets the needs of Marine crabs farming in factory. The test results show that the overall design scheme of the system is effective and feasible within the allowable error range of the factory aquaculture industry, especially in the case of a large feeding amount. To achieve automation and intelligent farming of factory-based aquatic products, reduce farming costs and improve the quality of marine crabs.
aquaculture; design; recirculating aquaculture system; marine crab breeding; automatic feeding
10.11975/j.issn.1002-6819.2019.13.005
S969.31
A
1002-6819(2019)-13-0047-07
2018-11-05
2019-04-18
浙江省公益技术项目(2017C32014);宁波市科技富民项目(2017C10006);宁波市农业重大项目(2017C110007)
胡海刚,浙江定海人,高级实验师,轮机工程学位点船舶自动化与机电控制方向学术梯队骨干成员,主要从事船舶工程安全技术与机电控制研究。Email:huhaigang@nbu.edu.cn
胡海刚,唐 潮,张林伟,张 刚,钱云霞.基于升降套筒体积调整的海蟹养殖定量投饵机设计[J]. 农业工程学报,2019,35(13):47-53. doi:10.11975/j.issn.1002-6819.2019.13.005 http://www.tcsae.org
Hu Haigang, Tang Chao, Zhang Linwei, Zhang Gang, Qian Yunxia.Design of quantitative feeding machine for sea crab cultivation based on volume adjustment of lifting sleeve [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(13): 47-53. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.13.004 http://www.tcsae.org
猜你喜欢
当代水产(2022年2期)2022-04-26
草原与草业(2021年4期)2022-01-13
今日农业(2021年1期)2021-03-19
渔业致富指南(2020年16期)2020-12-18
渔业致富指南(2020年5期)2020-12-18
当代水产(2020年10期)2020-03-17
当代水产(2019年8期)2019-10-12
当代水产(2019年2期)2019-05-16
中国新技术新产品(2017年22期)2017-10-30
科技视界(2016年27期)2017-03-14
