
GPS测量技术在乌拉泊水库大坝变形监测中的应用
2019-08-22 11:06
水利建设与管理 2019年8期
(乌鲁木齐水业集团有限公司,新疆 乌鲁木齐 830049)
大坝是水库工程的主要建筑物,由于水库拦水体积和河流冲击力的作用,坝体受力往往很大,一旦坝体变形程度超过允许限值,会造成裂缝、渗漏甚至溃坝的危险。因此,需要对坝体变形进行实时监测,在危险发生之前进行补强。而随着科技的发展,目前GPS测量技术在坝体变形监测中被广泛应用。
1 工程概况
乌拉泊水库位于乌鲁木齐市上游17km处,是乌鲁木齐河中游的一座拦河水库,比乌鲁木齐市中心高出约223m,因此,被称为“乌市头上一盆水”。水库淹没面积6.40km2,控制流域面积2596km2,大坝为碾压式均质土坝,坝顶高程1088.00m,最大坝高26m,坝顶宽6m,坝长1050m。设计库容4000万m3,兰新铁路、312国道均从水库下游通过。乌拉泊水库是一座集防洪、灌溉和城市供水等功能于一体的中型水库。乌拉泊水库始建于1959年,1978年进行除险加固和扩建,为监测大坝运行状态,2018年相关部门对大坝进行变形监测。
2 GPS测量技术的基本原理及误差分析
2.1 GPS测量技术的基本原理
GPS测量技术的本质是应用了“测距交会”的定位原理,虽然测距卫星在天空不停运动,但依然可以利用固定在地面上三个已知点的卫星激光测距仪来同时测定某一时刻至该卫星的距离,应用“测距交会”原理便可确定该时刻卫星的空间位置,应用这类方法可以测定三颗以上卫星的空间位置。如果第四个地面点(坐标未知)的卫星测距仪也参与到测定该点到三颗卫星的空间距离,则利用所测定的三个空间距离可以交会出该地面点的坐标,见图1[1]。
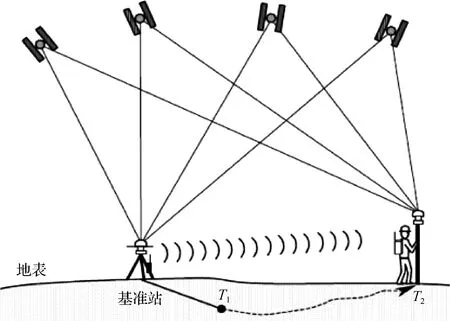
图1 GPS实时动态定位示意
2.2 GPS测量技术的误差分析
2.2.1 信号传输误差
2.2.1.1 对流层折射
卫星传输信号形式为电磁波,而非电离大气,会对电磁波产生折射而发生延迟。对流层折射强度与大气压力、温度、湿度有关,减小对流层折射影响的方法一般有以下两类:ⓐ当基线较短时,可采用“双差观测”来消除影响;ⓑ当基线较长或两端高差很大时,可利用Hopfield改正模型[2]消除影响。
2.2.1.2 电离层折射
大气中的电离层会使电磁波传输中受弥散性影响,传播路径发生偏差,减小电离层折射影响方法有以下三类:ⓐ利用双频观测,但要避开中午和太阳黑子活跃时刻;ⓑ利用导航电文提供的电离层改正模型可降低50%以上偏差;ⓒ当基线较短时,可利用“同步观测值求差法”。
2.2.1.3 多路径效应
如果天线附近有反射体,卫星信号在传输中会因反射而产生叠加信号,进而产生附加时延量,这叫作多路径效应。减小误差方法一般为以下三种:ⓐ消除天线周围反射体;ⓑ加强天线接收信号能力;ⓒ适当延长观测时间[3]。
2.2.2 GPS自身误差
2.2.2.1 卫星轨道误差
卫星运行受多种作用力影响,一旦产生细微偏差也会在长距离上造成较大误差。一般可以采用“轨道改进法”和“同步观测值求差法”来降低卫星轨道误差。
2.2.2.2 钟差
卫星上的高精度原子钟与GPS标准时之间会存在偏差和漂移,这叫作卫星钟差。可以通过对卫星连续监测来测定钟差值,进而消除剩余卫星钟差。接收机上的高精度石英钟钟差可采用“差分技术”(载波相位相对定位)和“外接频标法”(高精度定位)进行修正[4]。
3 GPS测量技术在大坝变形监测中的应用分析
3.1 建立大坝水平位移监测网
为了获得大坝变形监测网的准确基准(位置基准和高程起始基准),将平面坐标系和高程系联合测试,同时进行一次布网。但需注意在进行水平位移数据统计时,应将坐标系转换为坝轴线坐标系。本项目以“北京54坐标系”为标准来求取虚拟库中心坐标,并以此坐标y值和坝面高程1088.00m为参数,按照式(1)经过一系列换算最终得出水库抵偿高程面值[5]。
(1)
式中H——两端点高出椭球体面的高程,m;
R——地球曲率,m;
y——虚拟中心横坐标值,m。
3.2 各基点的布设及要求分析
3.2.1 基点位置选勘要求
为保证测量工作的顺利进行,必须对各基点位置进行挑选,具体要求如下:点位基础坚实稳固,标记易于长期保存;视野开阔,保证观测点周围高度角大于15°时无遮挡物;为避免干扰,基点要远离大功率无线发射源,距大功率无线发射源不得小于250m(距高压线不得低于50m)。
3.2.2 基点布设
为有效监测大坝水平位移情况,本项目设计布置了基准点(B级点)、工作基点(C级点)、变形监测点(D级点)三级监测网。各类点具体布设方案如下:B级点布置在水库大坝东西两侧沉降区以外,距坝体轴线1.0km,共布置4个,近似组成一个四边形,见图2;C级点均匀布置在坝体四周位置,距坝体轴线不大于400m,与B级点形成网络状,见图3;D级点在坝面迎水坡、背水坡各布置一排,然后在坝脚布置一排[6]。
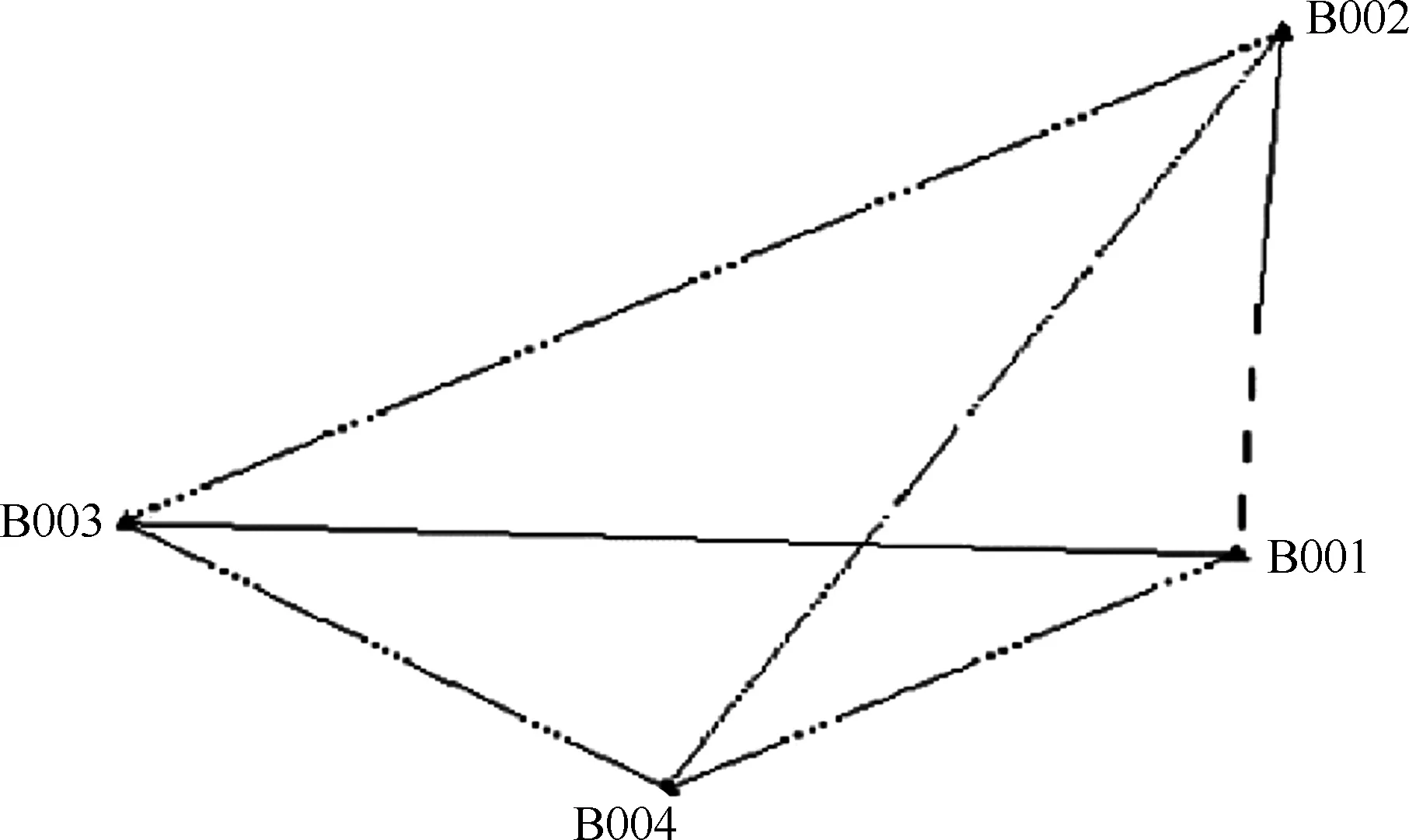
图2 基准点空间布置示意
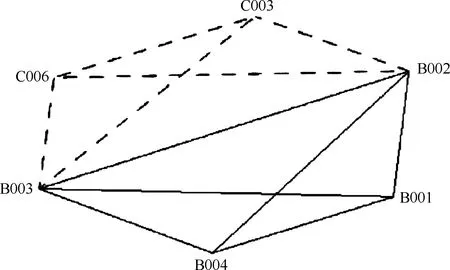
图3 工作基点空间布置示意
3.2.3 各类监测点观测要求
本项目对各个点的观测要求具体如下:观测仪天线基座的两个气泡要求严格居中,偏差不大于3′,天线定向(正北)误差不大于±3°;每个时段开机前,技术人员必须要量取天线高度,精确至1mm,并详细记录测站编号、时间、时段号。关机前再校核一下天线高度,前后差值不得大于2mm,否则测量结果作废;水平位移观测点相对于其他基点的坐标误差不得大于±3mm,各类观测点的观测要求见表1。

表1 乌拉泊水库大坝基准点、工作基点、变形监测点观测要求
3.3 变形点观测结果分析
3.3.1 水平位移基准点稳定性分析
通过测量,得出在两次观测中布置在乌拉泊水库大坝周边4个基准点的边长变化,见图4。通过分析可知:B001到其他三点的边长变化均较小;B002分别到B003和B004的长度变化为+7.2258mm和+4.5395mm,数值较大,稳定性较差,所以删除该点;B003到B004点的长度变化为-1.3050mm,数值较小。所以本项目最终将B001、B003、B004三点作为乌拉泊水库大坝变形监测网起算数据。
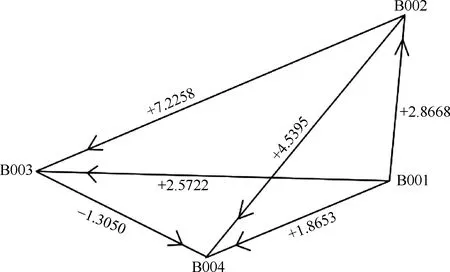
图4 乌拉泊水库大坝4个基准点边长变化(单位:mm)
3.3.2 水平位移变形监测点稳定性分析
在此主要观测坝脚处的变形监测点的运动情况,结果(部分)见图5。根据观测点X和Y的坐标变化,发现以下结果:Z343、Z345、Z349的X坐标较差最大;Z245、Z1411、Z1413、Z1415的Y坐标较差最大,较差值大,说明这些点相对于初始位置产生了较大的水平位移;由图5可知Z341到Z3411范围内所有点向西产生位移,Z245到Z1411范围内所有点向东产生位移。究其原因是乌拉泊水库大坝为碾压式均质土坝,主坝段坝基沉降超过因水渗入造成的坝面抬高和膨胀,而主坝段膨胀向坝体两端部扩展,进而引起布置在大坝两端的监测点出现东、西向运动量较大情况。综合分析可知:乌拉泊水库大坝坝基存在水平位移、沉降、渗水等问题。
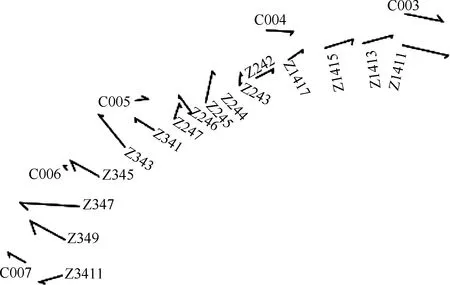
图5 乌拉泊水库大坝工作基点和变形监测点位移变化
综合分析:经过近1个月的监测分析,乌拉泊水库大坝总位移量在5mm以内,并且随着水位变化可恢复一定程度,稳定性满足运行要求,但坝体存在一定的渗漏问题,若不及时处理,可能会影响坝体的安全稳定性。
4 结 语
GPS测量技术相关配套软件完善,数据处理全部由计算机完成。相对于传统测量方法具有精度高、节省时间、速度快等优点,但需要注意首先保证选取基准点的稳定性。为监测乌拉泊水库大坝变形问题,本项目建立了B、C、D三级监测网,之后通过比较,删除了一些稳定性较差的点,通过观测点的位移来分析坝体的位移问题。乌拉泊水库大坝监测结果显示:其安全稳定性满足运行要求,但坝基存在水平位移、沉降、渗水等一些问题,需要进行一定的防渗处理。
猜你喜欢
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
建材发展导向(2021年19期)2021-12-06
黑龙江水利科技(2020年8期)2021-01-21
水利科技与经济(2020年12期)2021-01-06
山东工业技术(2017年24期)2017-12-29
创新作文(3-4年级)(2017年5期)2017-12-07
创新作文(3-4年级)(2017年5期)2017-12-07
创新作文(3-4年级)(2017年5期)2017-12-07
中国工程咨询(2017年9期)2017-01-31
