
三七精密播种机漏播重播检测系统设计与试验*
2019-08-14 09:43:48杨文彩韩文霆郎冲冲阚成龙
传感技术学报 2019年7期
谯 睿,杨文彩*,韩文霆,郎冲冲,阚成龙,张 冰
(1.云南农业大学机电工程学院,昆明 650201;2.西北农林科技大学机械与电子工程学院,陕西 杨凌 712100)
根据三七育苗的农艺要求[1],需在1.5 m宽的槽内密集排列27~28路导种管,完成27~28行单穴单粒播种,由于管数较多,漏播、重播、堵塞等现象无法通过肉眼实时监控,为一次完成开沟、播种、覆土多道工序,提高播种质量和播种效率,迫切需要开发与小行株距集排式导种管配套的漏播重播检测系统。目前对于漏播重播检测的方法有五类:包括孙永佳[2]、金鑫[3]、吴南[4]、王美美[5-7]、赵淑红[8]、李雷霞[9-10]、刘全威[11-12]等人运用的光电检测法;黄东岩[13]、王树才[14]、丁幼春[15]等人运用的压电检测法;周利明[16]、陈建国[17-18]等人运用的电容检测法;林宏[19]、王安[20]等人运用的高速摄影检测法和赵郑斌[21]、谢竹青[22]、陈进[23]等人运用的机器人视觉检测法。其中光电检测法、压电检测法和电容检测法结构简单、成本低,但存在检测盲区、易受灰尘和杂质影响;高速摄影检测法和机器人视觉检测法对事件还原度高、过程可视性好,但价格高昂,硬件软件结构复杂。
近年来国内在漏播重播检测领域取得不少研究成果,赵艳华[24]等人设计的基于CPLD的漏播检测装置,以红外发光管和光敏二极管为传感器件,完成单粒漏播和多粒漏播的检测和报警。吴南[4]等人设计的免耕播种机排种器性能监控系统以PLC和触摸屏为核心,用光纤传感器实时检测排种器排种的合格率、漏播率、重播率、变异系数等。林宏[19]等人采用Android操作系统与4G通信的技术相结合,设计出了漏播图像采集与传输的系统。现在对于播种机漏播重播的检测系统主要是小麦、玉米、油菜等面向大田、大行株距作物,且检测系统主要针对播种单体或路数不多的导种管,此外由于检测装置传感器造价低廉、精度较低、布局不合理等问题,造成检测区域不能均匀的覆盖导种管管径所有范围,导致检测区域存在检测“盲区”。目前与三七这种密集型的小行株距种植农艺要求相配套的重播漏播检测系统还很少见,本课题组前期用红外检测制作第一代无盲区的三七精密播种机漏播检测装置[25],但是对重播功能检测并没有作为重点,同时对种子上下紧密跟随的重播现象无法判断,此外该检测系统并未考虑到播种机操作人员操作的安全性和便捷性。
针对上述问题,本检测系统采用一对一的激光发射与接收方案作为获取落种信号的途经。该方案优点在于激光光束细且准直度高,光束能均匀的覆盖导种管管径的所有范围,不存在检测的“盲区”问题,能保证种子通过检测区域时,光信号能够可靠转换为电信号,此外本检测系统增加了蓝牙无线通讯模块,可将检测到的各导种管的排种数据发送到10 m范围内的上位机软件端,操作人员不仅能通过上位机软件完成数据显示和监控,还能实现数据的网络共享。从而方便工作人员通过上位机端软件监控播种机作业实况,还能与作业机器保持一定的安全距离。
1 检测系统总体方案设计
1.1 检测机构主体布局
该检测装置的主体部分由stm89c58单片机、霍尔传感器和双层对射式激光传感器等三部分组成。
本文根据三七精密播种机滚筒式的排种器结构特点,在窝眼滚筒一侧的端面且与轴向各排窝眼相对应的位置,圆形阵列一圈磁铁片。当窝眼滚筒旋转进行充种和排种时,圆形阵列的磁铁片会随着滚筒一起旋转,并依次经过的霍尔传感器的感应端(如图1),霍尔传感器将经过的磁铁片个数转化为磁脉冲信号,并将磁脉冲信号共享给各个单管检测系统的单片机。同时在导种管出口正下方布局一个双层对射式激光检测传感器。这两个传感器的信号端由单片机的IO口接入单片机。
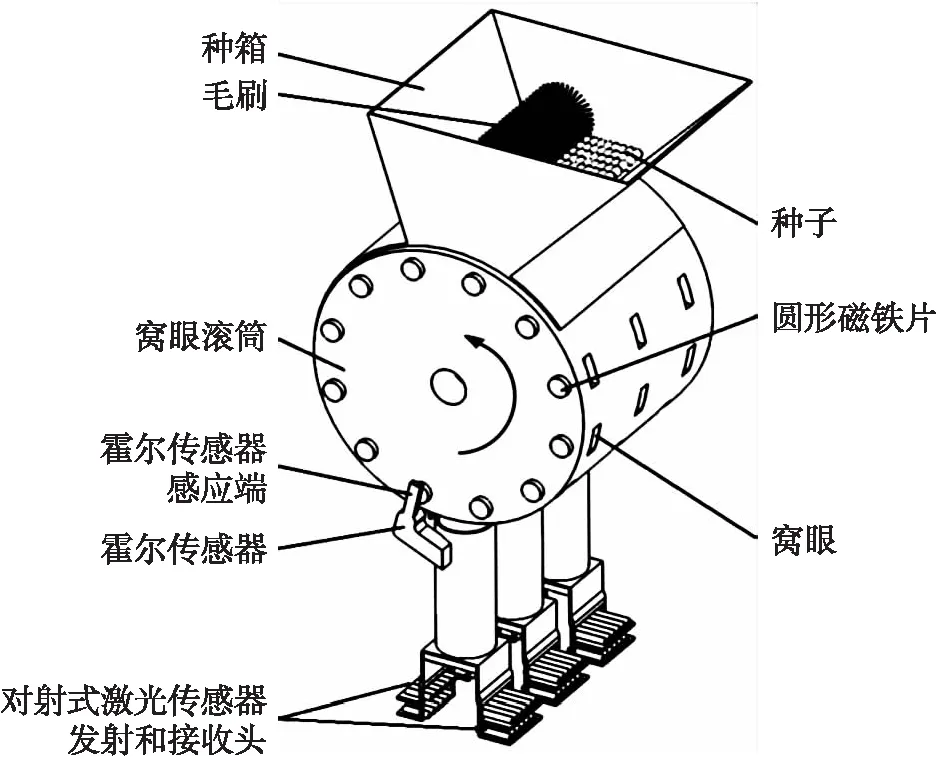
图1 主体布局示意图
1.2 检测原理
三七精密播种机播种的行距,即每一根导种管之间的距离大小已由农艺要求(左右株距为5 cm)确定好,因此播种机的导种管在装配机器时已固定好行距,故本文设计的重播漏播检测系统主要是检测播种过程中每一根导种管所播种子前后之间株距值。
在播种机开机以后,单片机立即打开计数器0,开始读取霍尔传感器获得的霍尔脉冲个数,并将获取到的霍尔脉冲信号通过算法转换为株距值,起始株距值设置为0 mm。例如:当一个检测系统获取到一个霍尔脉冲的信号后,单片机显示的株距值从 0 mm 跳变为50 mm。在下一个霍尔脉冲信号来临之前的任意时间点内,若有种子通过导种管落入激光检测区域,单片机会将株距值立即清零,即株距值从50 mm跳变为0 mm。若无种子通过导种管落入激光检测区域,单片机显示的株距值会从50 mm跳变为100 mm。同理当下一个霍尔脉冲信号来临时单片机的株距值跳变规律同上。
在单片机获取株距值以后,若当前株距值等于农艺要求的株距值,则判断为正常播种,若当前株距值大于农艺要求的株距值,则判断为漏播;当检测到的落种信号数大于已读取的磁脉冲个数,则判断为重播。
2 检测系统结构布局
本文设计的三七集排式重播漏播检测系统,由5根单管的检测系统组成,每个单管检测系统相互独立,且具有检测信号,显示数据和发送数据的功能,数据最终被发送到电脑终端的上位机软件中,将各管数据的汇总和保存。而每个单管检测系统由STC89C58单片机、霍尔传感器模块、落种信号检测模块(12路激光落种检测电路和模数信号接口电路)、液晶显示模块以及蓝牙模块等组成(如图2)。
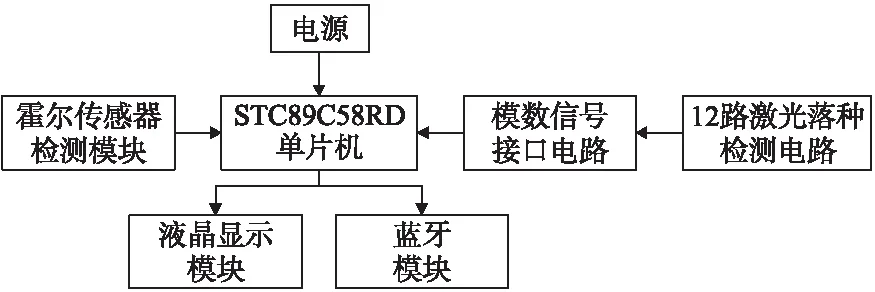
图2 单管检测系统设计方案
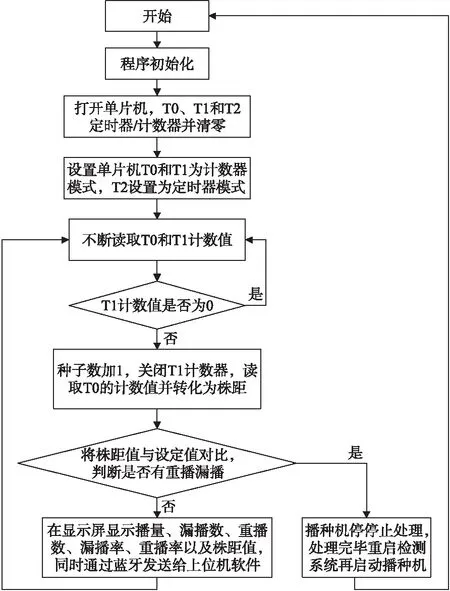
图3 单管检测系统单片机程序流程图
单管检测系统单片机程序流程图如图3所示。先给检测系统上电,然后播种机开机运行,检测系统的单片机STC89C58内置有三个定时器/计数器T0、T1和T2,程序初始化后,打开T0和T1并设置为计数器模式,T2设置为定时器模式,T0用于计数霍尔脉冲信号、T1用于计数落种信号个数,定时器2用于设置串口的波特率发生器。在程序的主函数里,不断判断T1的计数值是否为0,如果不为0代表此时有种子落下,立刻关闭T1计数器,种子数加1,同时将开机到T1计数不为0这段时间内读取的T0的计数值通过算法转化为株距值,即完成一次落种信号的检测,在下一次落种信号来临之前,对T0和T1的计数值清零,并打开计数器T1,若当前株距值等于农艺要求的株距值,则判断为正常播种,若当前株距值大于农艺要求的株距值,则判断为漏播;当检测到的T1的计数值大于已读取的T0计数值,则判断为重播。如果重播率和漏播率超过一定的设定值,单片机板上的一排led灯闪烁,提示生产人员需要停止播种机作业,检查播种机的导种管,排种器窝眼是否堵塞,并用空压机气枪对堵塞部位进行清理,清理完毕重启检测系统和播种机。检测系统样机实物图如图4和图5所示。
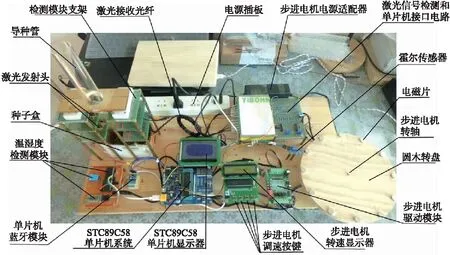
图4 单管检测系统样机实物图

图5 5管集排式检测系统样机实物图
2.1 落种信号采集模块的空间布局设计
本检测系统试验台结合实际的作业生产情况,将种子下落的高度固定为H=30 cm,同时考虑导种管和激光发射头的尺寸大小,为得到最优的检测精度,经过反复试验和测试,将A和B支架水平最优间距设置为35 mm,每层每根激光之间的最优间距为5 mm。
为满足本检测系统最小检测尺寸为4 mm(最小三七种子尺寸)且检测区域能均匀的覆盖导种管管径所有范围的要求,本文将落种信号采集区域设计为上下平行的双层矩形激光检测区域,图6中A支架两层为激光发射管,每层由六个激光发射头构成,B支架两层为激光接受光纤,每层由六个激光接受光纤构成(如图6(a)所示),同时将A支架的上层的每一组激光发射头和下层的每一组激光发射头交错排列,与之相对应的B支架的激光接受光纤也进行相应的交错排列,形成了上下两层相邻的每根激光的水平间距为2.5 mm排列模式(如图6(b)、6(c)所示)。
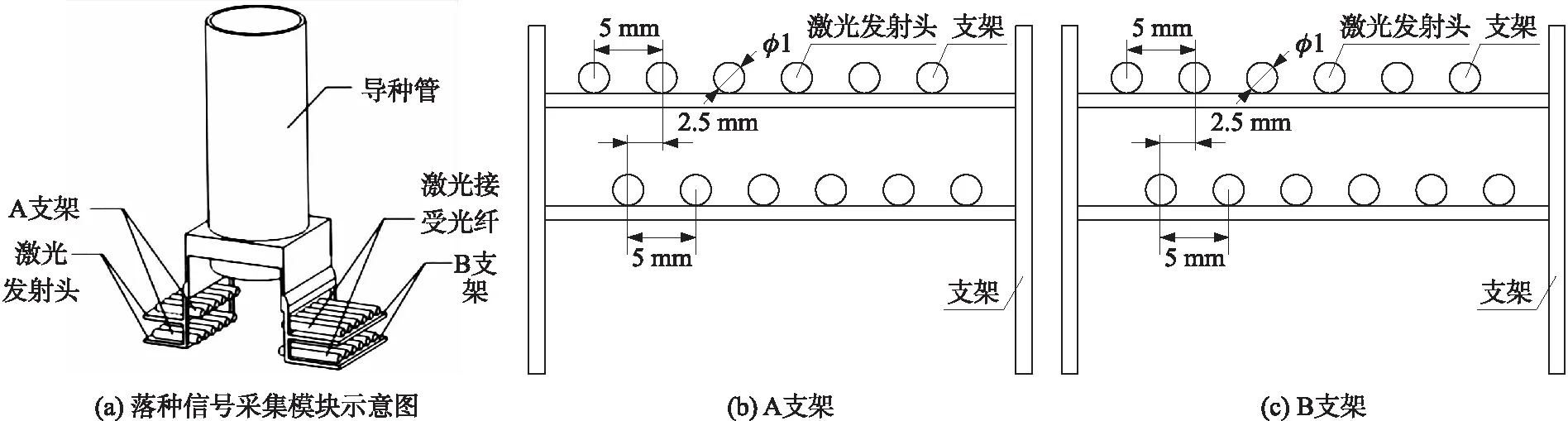
图6 落种信号采集模块及双层12路对射式激光接受光纤排列布局示意图

图7 12路激光信号采集电路图
2.2 光电检测电路设计
本文设计的光电检测电路由一路12个模拟光信号组成。光信号经12条光纤传导至12组激光接收管,再由二极管、电阻接到运算放大器的反相输入端,形成一个反相加法电路(如图7),该电路的运算放大器采用LM324芯片,该放大器内含四组运算放大单元,本检测电路仅用其中的两组放大单元,当种子下落时,只要经过双层的矩形激光检测区域,遮断光线,就会改变加法运算器的输入电流,进而使得输出电压下降,再经过比较电路将模拟信号转换为数字信号。其中比较电路的设计,能提高检测信号传输的稳定性和可靠性,通过调节比较电路中反向输入端的基准电压值,当灰尘和种子碎屑等小的杂质通过检测区域时,其信号变化量比基准电压值小,过滤去干扰信号,保证模拟信号准确输出。
在加法电路两端其输出电压与输入电压的关系为:
U0=Uref-[10(Ui1-Uref)+10(Ui2-Uref)+
10(Ui3-Uref)+10(Ui4-Uref)+10(Ui5-Uref)+
10(Ui6-Uref)+10(Ui7-Uref)+10(Ui8-Uref)+
10(Ui9-Uref)+10(Ui10-Uref)+
10(Ui11-Uref)+10(Ui12-Uref)]
该检测电路通过调节LM324运算放大器同相输入端的电位器电压Uref,让U0≈Uref,当种子掉入检测区域时,十二路输入电压中的某几路(Ui1至Ui12)电压值会增大,而输出电压值U0就会减小,U0的值与反相输入端设置的参考电压相对比后输出,接入数字电路接口。
3 检测系统响应性能分析
3.1 检测系统软件响应速度分析
三七精密播种机最大行进速度为600 m/h,单粒精播株距为5 cm计算:
Q=600/0.05/3 600=3颗/s
理论上单粒三七种子的最小落种时间间隔为:
Tmin=1 000/3=333 ms
由上述计算可知:三七种子的理论上最小落种时间间隔远远大于STC89c58单片机程序运行一个周期的时间(1 ms~1.5 ms),故程序对检测单粒落种时间满足要求。
而目前实际生产中的三七精密播种机的作业速度为120 m/h,单粒精播株距为5 cm计算:
Q=120/0.05/3 600=0.67颗/s
实际生产中单粒三七种子的最小落种时间间隔为:
Tmin=1 000/0.67=1 492 ms=1.492 s
由上述计算可知:三七种子实际上最小落种时间间隔比理论值更大,所以选择STC89c58单片机作为检测系统核心是满足实际生产的要求。
3.2 检测系统硬件响应速度分析
三七种子尺寸在4 mm~8 mm之间,种子穿过检测区域完全遮断激光光线的时间,与种子下落的高度有关,种子的下落高度与种子进入检测区域的速度有关,本检测系统试验台设定的种子下落的高度为H=30 cm,当种子到达检测区域时的速度为:
V=at
(1)
由公式:

(2)
由式(1)和式(2)可得
若按三七种子的最小尺寸L=4 mm,将式(2)代入计算出其穿过检测区域的时间:
t1=L/V=0.001 645 s=1 645 μs
理论计算可知:最小尺寸的种子完全阻断激光光束的时间为1 645 μs,通过激光检测电路中元器件的参数说明书可知,激光检测的硬件响应时间在5 μs~30 μs,故本系统硬件选择能够满足三七精密播种的检测要求。
4 试验研究
4.1 试验结果与分析
4.1.1 单次单粒投种检测试验
按照三七播种的农艺要求,一穴一粒的播种方式进行投种试验,每组试验投种300次[26],重复做10组试验,其试验数据如表1所示,由于本文设计的集排式检测系统由5根管组成,每根管对单粒投种试验所得试验结果一样,在此仅列出一根管的试验数据。由表1可以看出,该检测系统对单粒投种的检测精度达到99.967%。
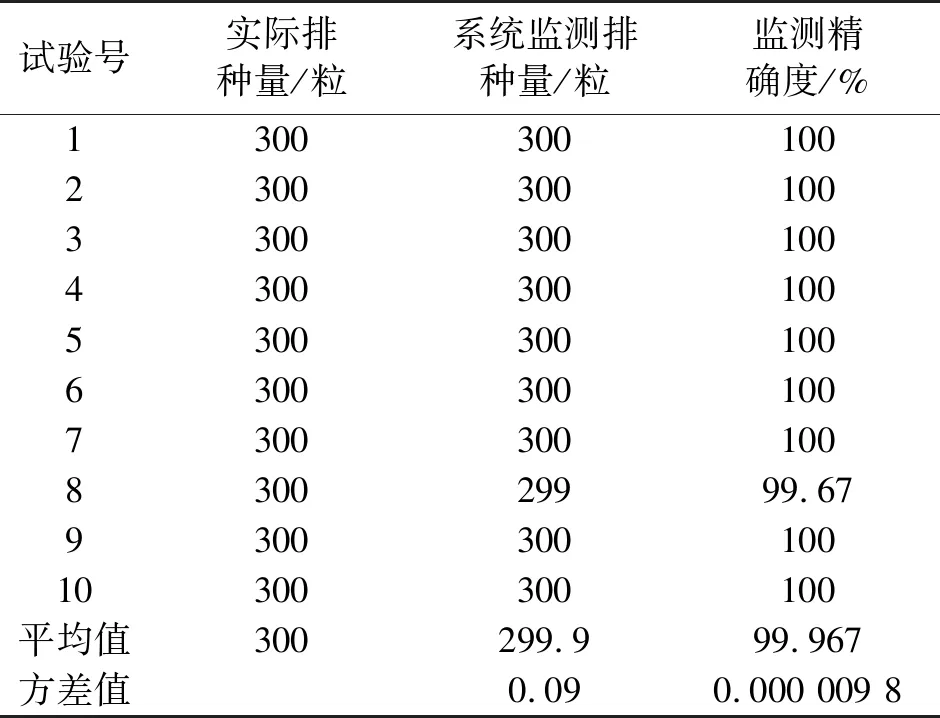
表1 单粒三七种子投种试验结果
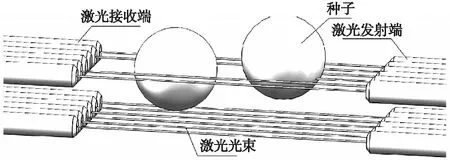
图8 三七种子上下紧密跟随示意图
4.1.2 单次双粒投种检测试验
三七种植的农艺要求单穴单粒播种,由于三七种子尺寸在4~8 mm之间,尺寸跨度较大,播种机排种器的窝眼设计尺寸不能完全适应所有种子的尺寸大小,故不能严格做到单穴单粒的播种要求,即一个窝眼卡两粒种子,在排种时两粒种子一起播出,在两粒种子下落过程中,从激光检测的方向看,两粒种子的空间位置十分接近或者有部分面积重叠,这种情况检测系统会将两粒种子误判为一粒种子,为了提高检测系统的检测质量,除了完成单粒漏播重播检测功能,还需考虑种子上下紧密跟随的重播的问题,如图8所示。本文利用上下双层对射式激光传感器的结构布局配合单片机程序算法的方法对三七种子上下紧密跟随的重播进行检测,并开展单次双粒投种试验,验证该方法对三七种子上下紧密跟随的重播现象判断正确率。
单次双粒投种检测试验是为了模仿三七精密播种机在播种过程中,两粒种子上下紧密跟随的重播现象。由于本文设计的5管集排式重播漏播检测系统,由5个独立的单管检测系统组成,每根单管检测系统检测方式都是相互独立互不干扰的,故单次双粒投种检测试验采用依次对每根单管进行单独投种方案。每根单管检测系统试验过程采用一次投两粒的投种方式,每组试验投种300次[26],重复做10组试验,试验数据如表2所示。
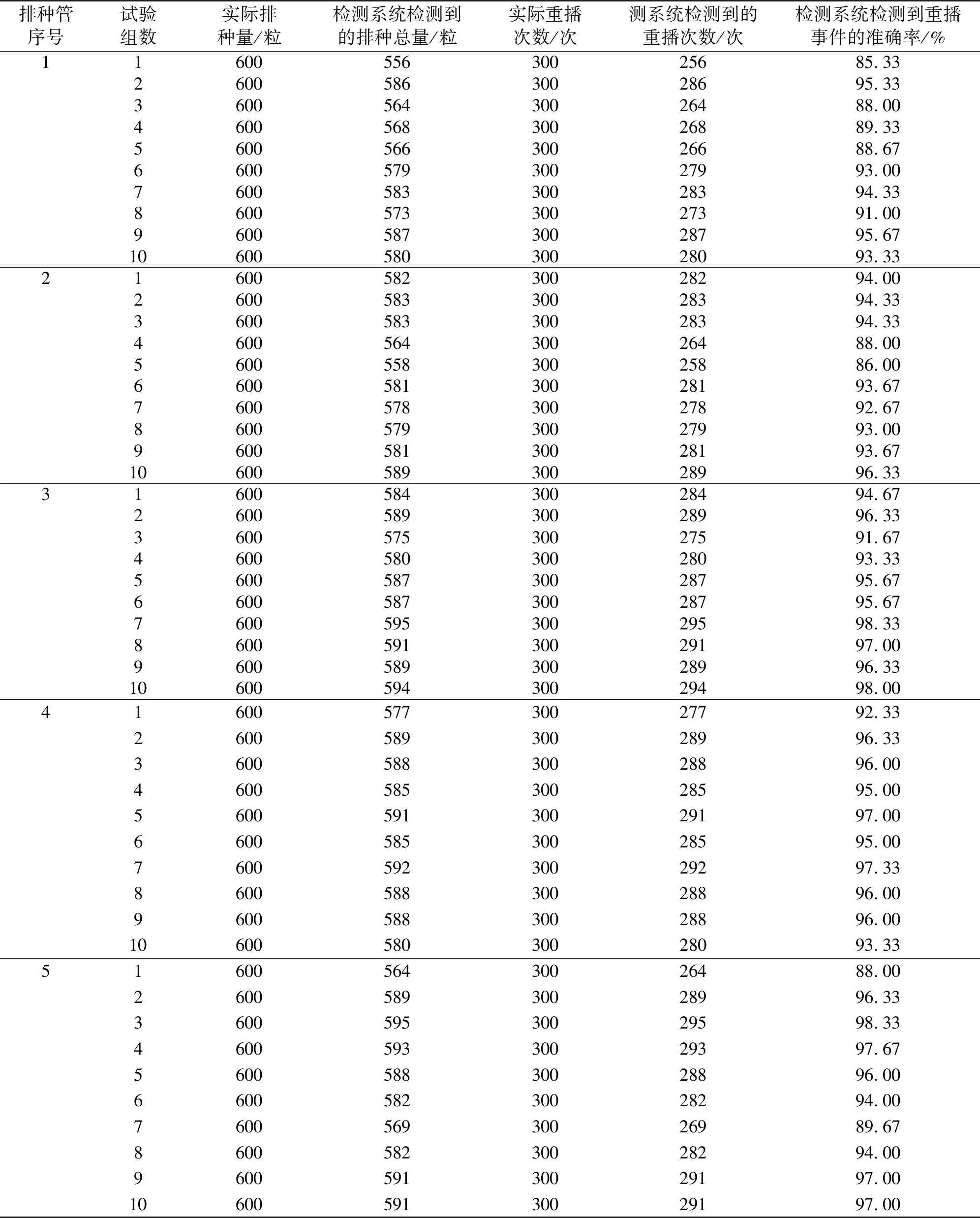
表2 各个排种管检测系统单次双粒的重播投种试验结果
利用假设性检验和T值检验区间估计的方法,将试验数据由SPSS和R软件进行分析处理,如表3所示。
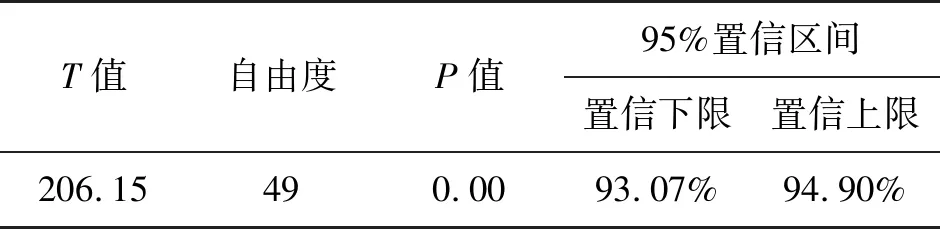
表3 T检验区间估计
以上数据分析表明:该检测系统对三七种子上下紧密跟随的重播现象的检测成功率在93.07%到94.09%之间。与单粒投种试验的检测成功率相比较显然下降很多。根据试验数据看,检测到种子的数量小于实际投种数量,即在一穴双粒种子下落时,落种检测传感器只检测到一粒种子。造成这种原因主要是两种情况:①从激光指向的方向看,两粒种子处于完全平行下落空间位置关系,传感器将落种信号处理为一个种子信号。②从激光指向的方向看,两粒种子处于一前一后的空间位置关系且重叠面积较多,传感器也会将落种信号处理为一个种子信号。
5 结论与展望
本文针对三七这种小行株距作物的重播漏播检测问题,采用窝眼滚筒侧面磁铁片圆形阵列结构,将排种信号转换为霍尔脉冲信号,采用将霍尔脉冲信号转换为株距值的方法,通过实际株距值与设定理论株距值相对比,实现对三七精密播种的重播漏播检测。该系统解决了下落种子对光线的阻断程度不一致所造成信号不稳定、检测区域存在检测盲区等问题。此外,光电检测电路的硬件响应速度和单片机检测算法的执行速度都满足三七精密播种的检测要求,试验结果证明,该检测方法对单粒漏播重播检测的准确率达99.967%,对种子上下紧密跟随的重播现象的检测准确率在93.07%~94.09%。
从试验结果可以看出,上下紧密跟随的重播现象的检测成功率在93%左右,检测成功率和紧密跟随的两粒种子进入检测区域时的空间位置有很大关系,从激光检测方向看重叠面积越多检测的成功率越小,所以目前仅采用一维空间方向的双层对射式激光检测方式来判断种子紧密跟随的重播方法还可以改进为两维空间方向的检测,即便两粒种子在这一个空间方向重叠面积较多,而从另一个检测空间方向看则不是重叠的关系或者重叠面积较少,这样可以进一步提高检测系统对上下紧密跟随的重播现象判断的准确率,但是检测装置的成本会提高。
目前,三七精密播种机还处于第三代试验样机阶段,其试验条件还处于理想测试阶段,这套检测系统属于播种机研发中的一个阶段性成果,该成果需要尽早的发布,在后期播种机的研发中,会将此检测系统与后期生产实际需要进一步结合,还要开展双粒和多粒的重播检测研究,不断的完善和改进该套检测系统,并运用于大范围的田间试验来验证新一代三七精密播种机的排种性能。
猜你喜欢
农业与技术(2022年9期)2022-05-17 07:45:48
河北农机(2021年9期)2021-12-07 17:00:34
农机质量与监督(2021年5期)2021-07-02 09:26:20
今日农业(2020年22期)2020-12-14 16:45:58
农业与技术(2019年9期)2019-05-28 09:23:40
农民致富之友(2017年12期)2018-01-31 19:54:33
农业现代化研究(2016年5期)2016-10-27 08:11:11
学苑创造·B版(2015年12期)2016-06-23 09:36:36
雷锋(2016年4期)2016-05-30 02:09:48
学习月刊(2015年10期)2015-07-09 03:35:12
