基于XDPS的三容液位实训装置模糊控制的实现*
2019-08-12 06:05吕晓娟李玉娜许海园
科技与创新 2019年13期
吕晓娟,李玉娜,许海园
基于XDPS的三容液位实训装置模糊控制的实现*
吕晓娟,李玉娜,许海园
(郑州电力高等专科学校 动力工程系,河南 郑州 450004)
以三容液位过程控制实训系统为模型,设计了基于XDPS的模糊控制算法。经模糊算法得到的控制量控制电动调节阀的开度,使下水箱的水位达到给定值,并通过组态、图形生成及图形显示功能实现液位控制系统的监控界面。实验结果表明,所设计的模糊控制器能精确控制三容液箱的水位,有效改善了系统的静态特性及动态特性,获得了良好的控制效果。
XDPS;三容液位;模糊控制;控制方案
模糊控制(Fuzzy Control)作为先进控制领域的一个重要应用,其优点是系统的超调量小、响应速度快、波动小、过渡平稳、鲁棒性强。THJ-4型过程控制对象是天煌科教实业公司生产的一款多功能物理模拟对象,为复杂控制系统、先进控制系统的研究提供了平台。本实验针对该过程控制对象的三容液位控制过程,设计一种Fuzzy-PI复合控制方法,并基于XDPS(XinHua Distributed Processing System)控制方案组态、监控画面图形生成及动画连接,最后进行画面监控联机运行、调试,实验证明了设计方法的有效性。
1 控制系统硬件结构
三容液位过程计算机控制系统主要硬件构成为工程师站人机接口PC机、总线、DPU、端子板、卡件、恒压磁力泵、电动调节阀、电磁阀、三容水箱、储水箱。上水箱、中水箱、下水箱串联构成三容水箱,每个水箱的高度均为200 mm,以上水箱的入口流量作为控制变量,以下水箱的水位为被控量。水箱底部安装有KYB扩散硅压力变送器对水位进行检测和变送。AI端子板和卡件实现下水箱水位测量变送信号的输入,经预处理后进入DPU,在DPU的组态程序中计算水位与给定值的偏差,经模糊算法得到控制量,控制量经AO、DO卡件和端子板输出作用到恒压磁力驱动泵、QSTP-18K型智能直行程电动调节阀和ZS-15H电磁阀。DPU和工程师站PC机通过A、B数据网连接,实现数据共享,因此可通过PC机实现水位的监测和在线控制。
2 三容液位过程的数学模型
三容液位过程可看作三个单容水箱的串联,即三个单容有自平衡能力对象的串联。在不考虑时滞的情况下,三容液位对象的传递函数为:

式(1)中:3()为系统的被控量,即下水箱液位;0()为系统的控制量,即上水箱的入水流量;为放大倍数;1,2,3分别为上水箱、中水箱以及下水箱的时间常数。
考虑到将采用Fuzzy-PI复合串级控制方法,所以将三容对象分为导前区01()和惰性区02(),其中上水箱为导前区,中水箱和下水箱串联作为惰性区,则:

式(2)中:1()为上水箱的出水流量。
首先,进行上水箱对象特性测试,改变电动调节阀的开度可以改变0的大小,作为阶跃输入信号,1为输出变量,1(∞)为过程响应的稳态值。过坐标原点对响应曲线作切线,切线与稳态值交点所对应的时间就是时间常数1,得导前区数学模型为:


最终确定惰性区的传递函数为:

由上述公式可得三容液位对象数学模型为:
3 Fuzzy-PI复合控制系统结构
本实验采用在基本模糊控制器基础上再构造一个PI并联通道的Fuzzy-PI复合控制结构。利用模糊控制器抑制干扰,保证系统响应的快速性,同时又保留了串级控制系统抑制内扰的特点,使系统具有良好的控制精度和动态品质。Fuzzy-PI复合控制系统结构如图1所示。图1中,01()为导前区对象,02()为惰性区对象,T1()为主调节器,T2()为副调节器,c()为模糊控制器,Zf为执行器和调节阀,1()和2()为测量变送器,3()为被控量,0()为给定值,()为偏差量。
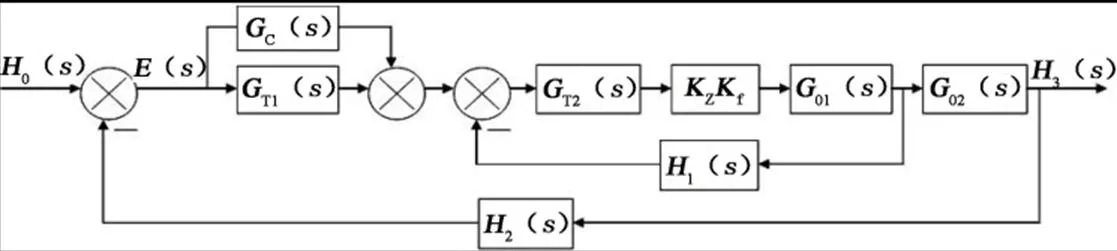
图1 Fuzzy-PI复合控制系统结构
4 系统监控界面的开发
系统监控界面的开发是基于XDPS工程师站PC机的图形生成软件(Maker)制作的。Maker为用户提供模拟观察对象的模拟基图目标,辅之以趋势图、-、报警和动态位图等特殊目标,并可将图中各种目标与实时数据、报警记录进行动态连接,生成的文件可通过与Maker对应的图形显示软件(Show)显示出来,观察到真实世界的形象动态显示。
本实验根据工艺和监控要求,运用图形生成软件Maker绘制三容水箱液位控制工艺流程图,包括被控对象的工艺管线、现场安装的各种变送器、执行器等设备。先启动XDPS总控软件Netwin.exe,然后,在Netwin中以ENG以上身份登录,按“图形生成”按钮启动Maker.exe。接下来的绘制方法类同于Windows中的画图软件操作方法。在绘制好的基图目标基础上,建立动画连接。选中基图目标后双击,弹出动画连接编辑动画对话框。通过该对话框上的按钮可以增加、修改、删除、移动所选目标的动画连接,编辑结束后按“关闭”按钮。
5 实验结果及分析
点击“DPU组态”进入组态界面,点击LK进行在线连接;先选中在线DPU号,再用“读入组态文件”菜单命令读入离线组态好的组态文件,然后,用“下装”菜单命令下装。下装后,组态软件中的数据与DPU一致,软件进入在线显示状态。点击“图形显示”进入三容水箱液位控制流程图操作界面。先对电动调节阀上电,手动给出一定的开度,再对电磁阀1-8、恒压磁力驱动泵上电。点击“AUTO”,在弹出的手操器上设置水位给定值、调节器参数,并将系统切为自动状态。实验将液位从低液位升高到给定值。通过单点调入功能,调出下水箱液位的实时趋势图。
6 结束语
本文在研究模糊控制应用的基础上,构建了基于XDPS的三容液位模糊控制系统,设计了Fuzzy-PI复合控制方案,在Maker环境中开发了监控软件,并实现了系统的在线运行调试。在线调整明显优于常规PID调节器。实验表明本文方法有效改善了系统的动态特性,鲁棒性较好。
[1]孙建平.LABVIEW中模糊PID的实现及在XDPS中的应用[J].仪表仪器用户,2016(2):40,41-43.
TP273
A
10.15913/j.cnki.kjycx.2019.13.006
2095-6835(2019)13-0014-02
吕晓娟(1980—),女,河南信阳人,硕士,副教授,研究方向为热工控制仪表及系统。
编号:ZEPCKY2019-27
〔编辑:张思楠〕
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
科学与财富(2022年6期)2022-07-04
砖瓦世界·下半月(2020年10期)2020-10-20
科技视界(2020年17期)2020-07-30
汽车实用技术(2018年17期)2018-10-21
数码设计(2018年15期)2018-10-20
电脑知识与技术(2018年8期)2018-05-07
科学与技术(2018年13期)2018-04-25
青年时代(2017年7期)2017-03-28
科技与创新(2015年2期)2015-02-11