
基于双目激光的车辆限高障碍探测技术研究
2019-08-07 06:19丁红杰杨洪
汽车实用技术 2019年14期
丁红杰,杨洪
基于双目激光的车辆限高障碍探测技术研究
丁红杰,杨洪
(中国电子科技集团公司第二十七研究所,河南 郑州 450047)
针对车辆在经过限高杆或拱形桥洞时,频繁发生碰撞事故,造成车顶严重受损以及道路公共设施损坏的情况,文章进行了基于双目激光的车辆限高障碍探测技术研究,通过研究确定双目激光传感器的安装方式,结合双目激光测得的距离差分信号和基于时间域的距离曲线相关程度,进行探测算法研究,判断车辆是否能够安全通过限高障碍物。并通过试验验证了系统设计的可行性。
限高障碍;双目激光;距离信号;概率
前言
车辆在行驶过程中,会遇到限高杆、拱形桥等限高障碍物,如何准确探测感知限高障碍物,是车辆限高障碍探测预警系统的关键技术。现阶段在国内外研究领域中,关于车辆行驶路径上的障碍物检测研究,提出了许多算法和实施手段,如彩色 CCD 的计算机视觉方法[1],此外还有基于三维激光雷达的方法[2][3],多传感器信息融合等方法[4][5]。但受制于夜间低光照度环境限制、探测距离的限制、数据处理难度大等问题,以上方案都不能很好地满足系统要求。为提高车辆通过限高障碍的安全性与便利性,本文基于双目激光,进行车辆限高障碍探测技术研究,提前探测车辆是否能够安全通过限高障碍,并能够发出报警信号提醒驾驶员,及时减速或停车,避免事故发生。
1 系统原理概述
如图1所示,本系统是将两个相同激光测距传感器固定在车辆前端仪表台两端,与水平面夹角为θ角。在车辆行驶的过程中,激光测距传感器以固定频率测量前方障碍物信息,即在某一时刻t0,激光传感器测得车辆前端与障碍物的直线距离,通过三角函数模型,由公式1-1,1-2可得前方障碍物高度、障碍物与车辆前端的水平距离,进而根据相关算法判断车辆是否能够正常通过限高障碍物。


式1-1,1-2中,h表示激光测距传感器距离路面的高度,H表示前方障碍物高度,D表示障碍物与车辆前端的水平距离,d0表示传感器返回有效距离数据。
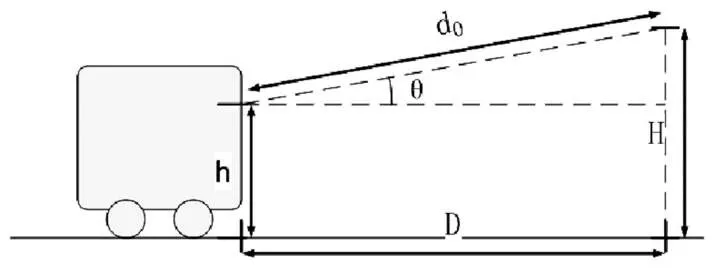
图1 障碍物高度及距离采集原理图
2 系统硬件设计
如图2所示,本系统主要由激光测距传感器A、激光测距传感器B、控制与报警模块、传感器安装支架、调节螺栓等部分组成。

图2 系统实物模型图
激光测距传感器A、B通过安装支架固定在车辆前端仪表台两端,以同样的角度采集距离信息。系统通过调节螺栓使激光测距传感器A、B保持在同一水平面上。
本系统使用的激光测距传感器弱光环境或强光环境测量范围均可达到0.5-125m。光斑直径仅有50cm@125m,指向性达到系统检测要求。激光传感器ZDL-0100-1性能指标见表1。
如图3所示,控制与报警模块通过RS485总线对激光测距传感器A、B测得的数据进行采集,并存储、处理、计算,从而得出判断结果,若车辆无法安全通过限高障碍物,则通过声/光报警装置发出报警信号,提醒驾驶员及时减速或停车,避免事故发生。
表1 激光测距传感器主要性能指标

车载电子设备处于严苛的使用环境中,因此要求芯片和电路具有高可靠性和响应速度。系统MCU采用意法半导体的STM32F103ZET6,最高工作频率为72MHz,内置乘法器,完全满足存储要求和计算要求。本系统采用的SRAM型号为IS62WV51216,是ISSI公司生产的一颗 16 位宽 512K容量的 CMOS 静态内存芯片。另外系统485通讯配置芯片SP3072;EEPROM存储采用芯片24LC256;电源模块采用芯片LM1117-5.0、LM1117-3.3,其中5V电源给激光测距传感器供电,3.3V给MCU供电。
3 算法及软件设计
3.1 基于双目激光的限高障碍探测算法研究
3.1.1基于距离差分信号的阈值梯度处理
系统通过两个激光测距传感器A、B测得距离信号的差值作为系统判断的重要依据,如果同时检测到的距离信号的差值在一定的“阈值”范围之内,作为检测到限高障碍的依据,可以过滤掉不规则物体,防止“误报”现象的发生。
本系统传感器在正常环境下测量范围为0.5m-125m,考虑到车辆在行驶过程中会有前方车辆遮挡以及激光传感器指向天空(距离无限大)等情况,综合考虑刹车距离及驾驶员的反应时间,传感器测距实际有效距离设定为30m到60m之间。
本系统中基于双目激光传感器而得出的距离差分信号为实际有效距离的差值,此差值代表规则障碍物的形状特征。在理想情况下,对于限高杆和拱形桥等近似规则的障碍物,距离差分信号接近于0(或者是一个无穷小值)。但是受到车身和路面以及障碍物本身的影响,差分信号可能在一定范围内浮动。为了描述这种浮动,这里使用阈值的概念,同时为了描述检测到限高障碍物的可能性,引入阈值梯度的描述方法,如表2所示。
表2 根据距离差分信号确定的概率分布表

3.1.2基于时间域的距离曲线处理
传感器采集的距离信息随着车辆的前进或后退在不断更新,通过连续采集差分信号数值结合阈值梯度来判定结果,如果前方是不规则的障碍物,将不可避免地出现“误报”的情况。两个传感器将检测到同样高度和距离的障碍物,系统将判定道路前方具有影响车辆安全通过的限高障碍,或者在车辆转弯的过程中,前方任何障碍物的距离信息会变得不规则,也会有一定概率检测到同样高度的障碍物而出现“误报”。
为了防止出现“误报”,通过研究距离信息和障碍物特征的规律,根据系统时间基准和传感器采集数据,可以根据不同限高障碍物的特征推理出系统在一段时间内的距离信息曲线。采用判断距离曲线“趋势”的数学方法,识别出高度相似,但距离有误差的情况,作为系统判断的另一个依据。
系统选定两个传感器测得的距离信息作为随机变量X和Y,在一定的时间长度内,E(X)和E(Y)分别是随机变量X和Y的数学期望,如公式(1)所示。两个传感器测得的距离信息以各自的数学期望值作为标准,X和Y的值在数学期望值上下变动。

系统采用两个变量X、Y的协方差COV(X,Y)表示两个变量的变化趋势,如公式(2)所示。如果两个变量的变化趋势一致,也就是说如果其中一个大于自身的期望值,另外一个也大于自身的期望值,那么两个变量之间的协方差就是正值。如果两个变量的变化趋势相反,即其中一个大于自身的期望值,另外一个却小于自身的期望值,那么两个变量之间的协方差就是负值。



一段时间内,距离信息的协方差表明这段时间内两条距离曲线的变化趋势的一致性。系统中,由于车辆震动、道路不平等原因会造成测量数据幅值的整体偏移,协方差可以表示两个变量变化的相关程度,而相关系数ρ则消除了幅值对于相关度的影响,只从趋势来判断,符合系统的要求。
表3 根据相关度确定的概率分布表

3.1.3概率的综合判定
结合以上所述,系统仅仅考虑差分信号阈值或者仅仅考虑相关系数都可能造成系统对于限高障碍物的漏报和误报情况。综合考虑以上两个因素才能最大程度地正确检测限高障碍物。

综上所述,当0≤P<0.25时,系统不报警;当0.25≤P<0.48,系统通过蜂鸣器以较低频率的“嘀嘀”声和指示灯以较低频率闪烁进行报警;当0.48≤P,系统通过蜂鸣器以较高频率的“嘀嘀”声和指示灯以较高频率闪烁进行报警,从而提醒驾驶员注意前方限高障碍物情况,减速或停车,防止事故发生。
3.2 系统软件设计
基于双目激光传感器的距离差值和时间域距离曲线的相关系数,结合概率计算,综合判断前方是否有影响车辆通过的限高障碍物。系统软件流程如图4所示。
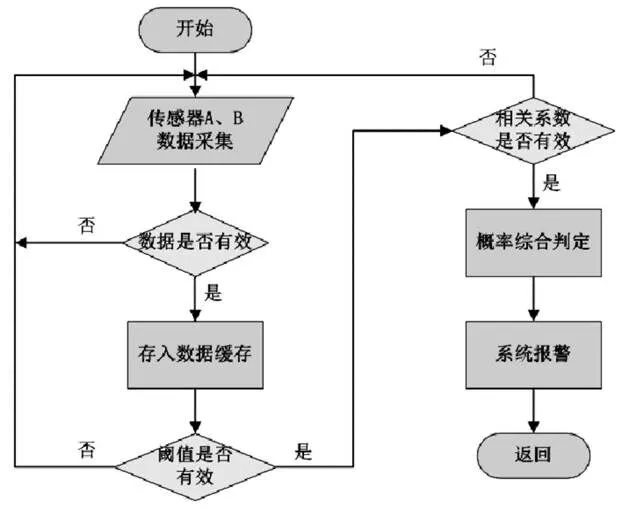
图4 软件流程图
4 系统实验与分析
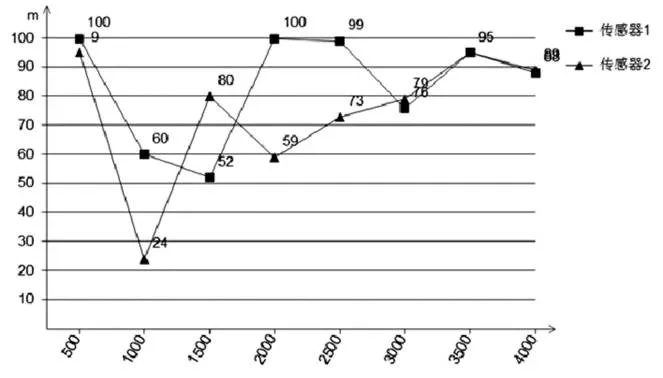
图5 前方无限高障碍物的道路测距曲线

图6 前方有限高杆的道路测距曲线
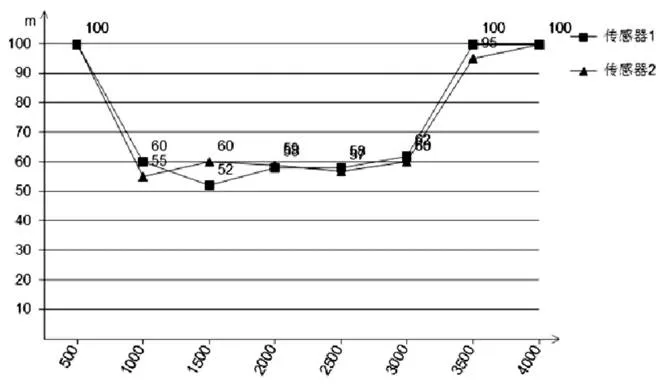
图7 前方有拱形桥的道路测距曲线
根据上文提出限高障碍物探测方法,进行了相关实验,图5是车辆在道路上正常行驶时,前方无限高障碍物的道路测距曲线;图6是车辆在道路上正常行驶时,前方有限高杆的道路测距曲线;图7是车辆在道路上正常行驶时,前方有拱形桥的道路测距曲线。
通过实验可以看出,车辆在前方无限高障碍物的道路上行驶时,传感器距离信号差值较大且无相关性,系统也没有出现报警;车辆在前方有限高杆的道路上行驶,在临近限高杆时,传感器距离信号差值较小且相关性较高,系统出现短时高频报警信号;车辆在前方有拱形桥的道路上行驶,在临近拱形桥时,传感器距离信号差值较小且相关性较高,系统出现较长时间高频报警信号。
5 总结
本文介绍了双目激光的安装方法,结合限高障碍探测算法,通过实验表明系统可以有效地提前检测到车辆前方的限高杆或拱形桥,并能够及时报警,提醒驾驶员及时减速或停车,避免事故发生。本文所研究的探测技术主要需两个激光测距传感器进行限高障碍物检测,具备成本低廉,安装方便,且不受夜间低光照度制约等优势,为系统的大规模应用推广奠定基础。
[1] 邓博,吴斌.基于双目立体视觉的障碍物检测方法[J].北京:信息与电脑,2018(1):41-45.
[2] 张积洪,李兴旺.双目激光泊位引导系统[J].天津:机械设计,2015,11(32):88-91.
[3] 李玉株,肖江,黄丽燕,等.基于TDC-GP2 的激光测距系统设计[J].北京:仪器仪表学报,2011,32(6):358-362.
[4] 王琪龙,李建勇,沈海阔.双目视觉-激光测距传感器目标跟踪系统.上海:光学学报,2016,36(9):1-8.
[5] 杜钊君,吴怀宇.基于激光测距与双目视觉信息融合的移动机器人SLAM 研究[J].北京:计算机测量与控制,2013,21(1):180-183.
Research on Vehicle Height Limiting Barrier Detection Technology Based onBinocular Laser
Ding Hongjie, Yang Hong
(The 27th Research Institute of China Electronics Technology Group Corporation, Henan Zhengzhou 450047)
In view of the frequent collision accidents of vehicles passing through the height-limiting poles or arched bridges, resulting in serious damage to the roof and damage to the public facilities of the road, this paper studies the detection technology of vehicle height limit obstacles based on binocular laser. Through research to determine the installation mode of the binocular laser sensor, combined with the distance differential signal measured by the binocular laser and the correlation degree of the time domain based distance curve, the detection algorithm is studied to determine whether the vehicle can safely pass the obstacle limit. The feasibility of the system design was verified by experiments.
height-limiting obstacle; binocular laser; distance signal; probability
U467.4
A
1671-7988(2019)14-57-04
U467.4
A
1671-7988(2019)14-57-04
丁红杰(1980-),男,本科,高级工程师,就职于中国电子科技集团公司第二十七研究所,从事汽车电子、智能车辆方面研究。
10.16638/j.cnki.1671-7988.2019.14.018
猜你喜欢
农业工程学报(2022年8期)2022-08-08
青年文学家(2022年10期)2022-04-25
江苏农业科学(2022年6期)2022-04-15
动漫界·幼教365(中班)(2020年3期)2020-04-20
市场周刊·市场版(2019年55期)2019-12-08
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
电脑知识与技术(2016年7期)2016-05-19
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31
