
一种360°全景泊车控制器电源系统设计
2019-08-07 06:19李东浩阚晶晶
汽车实用技术 2019年14期
李东浩,阚晶晶
一种360°全景泊车控制器电源系统设计
李东浩,阚晶晶
(安徽江淮汽车集团股份有限公司技术中心,汽车智能网联技术安徽省重点实验室,安徽 合肥 230000)
360°全景泊车系统通过4个广角摄像头和相应的图像处理单元,使驾驶员通过显示屏可以直接查看车身周围360°全景视图,地面上不存在视角盲区,可以帮助驾驶员清楚确认车辆周边是否存在障碍物,帮助驾驶员轻松泊车,避免车辆刮蹭。文章从系统主电源设计、视频芯片电源设计等方面系统介绍了一种360全景泊车控制器的电源系统设计,并对其EMC设计进行了相关介绍。
360°全景泊车控制器;电源系统;EMC
前言
随着汽车越来越多的走进千家万户,泊车这个令人头疼的问题也越发凸显。无论是超声波泊车雷达系统,还是目前流行的单个倒车后视摄像头,都只能顾及到车辆后方或者前方,无法同时兼顾车身四周状况,存在视角盲区。360°全景泊车系统通过安装于车头、车尾、车身两侧的4个超广角摄像头和相应的图像处理单元,使驾驶员通过显示屏可以直接查看车身周围360度全景鸟瞰俯视图,地面上不存在视角盲区,可以帮助驾驶员清楚确认车辆周边是否存在障碍物,帮助驾驶员轻松行车和停泊车辆。该系统目前已在国内多款车型上量产搭载。
全景泊车控制器硬件系统主要包括DC-DC降压模块,MCU模块,PMU电源管理模块,DSP模块,视频A/D模块,视频D/A模块以及存储模块。硬件设计框架如图1所示。
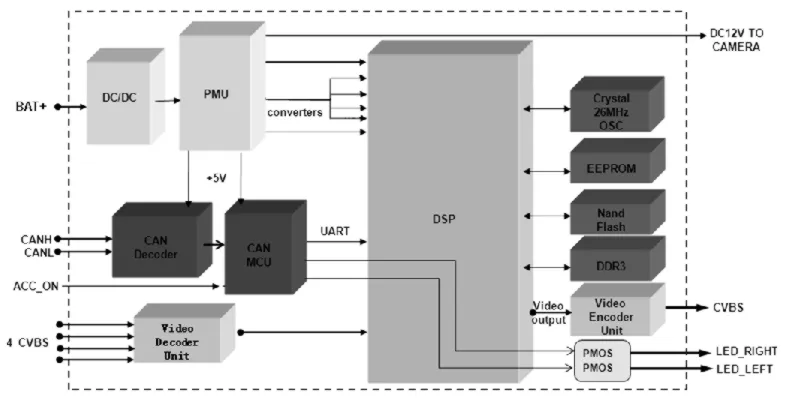
图1 全景泊车控制器硬件设计框架图
本文重点介绍控制器电源电路的设计和EMC的设计方案。
1 电源电路的设计
1.1 系统主电源设计
全景泊车控制器由整车12V电池供电,因此电路选用了一颗在汽车电子领域应用较为广泛的TI的宽电压DC-DC降压IC(LM22676),具有较高的稳定性,具有输入电压范围宽(4.5~42V),转换效率高(>90%),漏电流小(约25uA),及短路保护功能等优点;DC电路设计输出电流能力为3A,整个系统工作电流为0.45A(12V条件下),满足3倍工作电流的设计要求,且符合AEC-Q100 1级标准(-40~+125℃运行结温范围)。
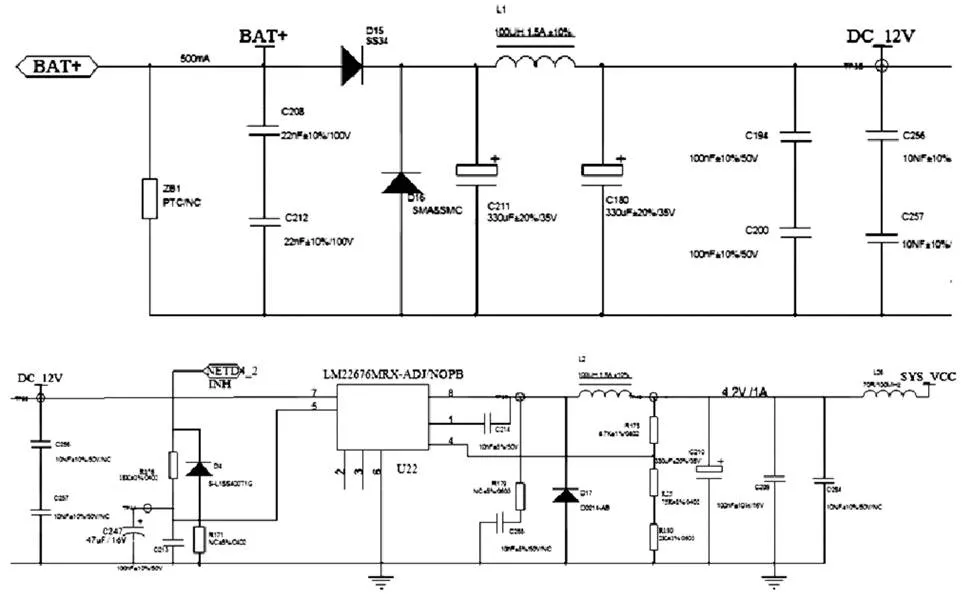
图2 系统主电源电路
U22的第5Pin为使能脚,R176和R171组成分压电路,避免电压过高而导致使能端内部击穿,D4为钳位二极管。U22工作频率为500KHz,参照芯片规格书的设计,输出电感为10uH,电容为33uF,达到最佳得输出效率,输出电压可调,(调整R175和R25,R180的比值即可改变输出电压值),DC-DC设计输出电压为4.2V,设计4.2V输出的原因是后端LDO的供电电压需满足3.5V到5.5V,电压太低会导致LDO输出电压不稳定或不能满足要求,输出电压太高可能会烧坏LDO,所以输出最终电压调整为4.2V输出,经验证满足电路设计要求。4.2V系统电源分为几路为整个系统供电,包括DSP,TVP5158,CH7026B,USB,NAND Flash等几路电源。
1.2 DSP及DDR电源系统的设计
表1 PMU各组电源供电
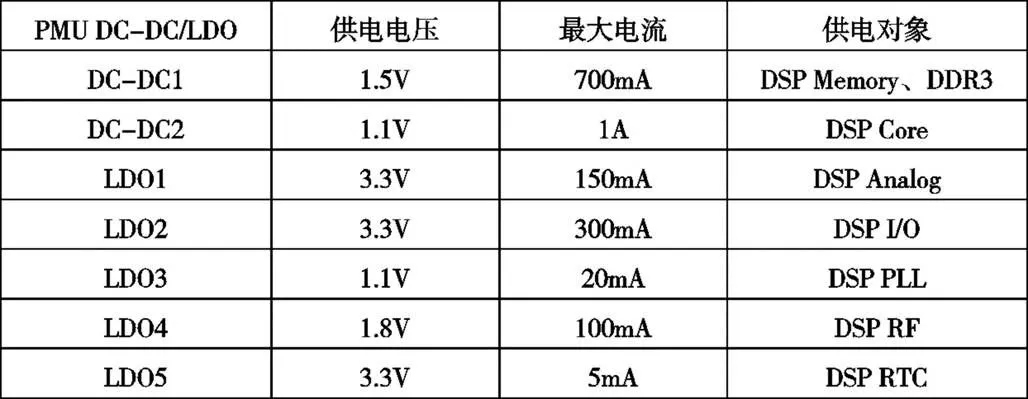
为DSP及DDR供电的有独立PMU (RN5T566),该芯片为日本理光公司生产,具有2组高效DC-DC输出,5组LDO输出,电源控制逻辑,3路电压检测器,过温保护和欠压闭锁功能等,针对DSP单元系统而设计的,性能稳定。PMU各组电源及对应供电对象如表1所示。
此外,该芯片配合DSP使能控制,使得上电顺序满足要求,比如,RTC3.3V为常电不受使能控制,当RTC电源接通后则内核电压1.1V才会使能,然后I/O口电压开启,如果前面电源不正常,或DSP异常,则后面电源就无法开启,可以有效的防止芯片损坏,同时也便于硬件检修。
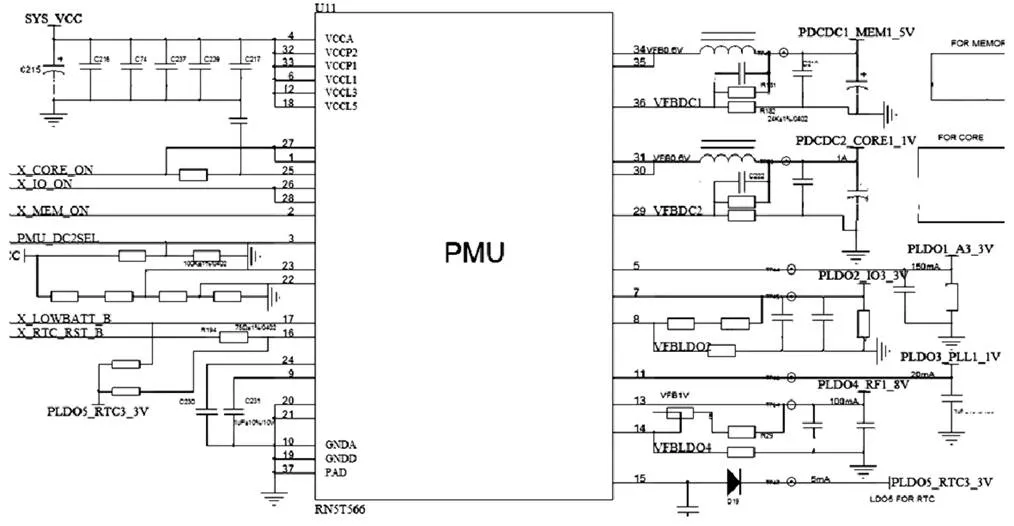
图3 DSP及DDR电源电路
1.3 视频ADC芯片TVP5158电源系统的设计
TVP5158电源系统共有三组电压,分别为1.1V,1.8V,3.3V,由于1.1V和1.8V电源系统电流较大故选用DC-DC(LM3670ADJ)作为降压芯片,3.3V电源系统电流只需要5mA,所以选用LDO供电即可,LDO 型号为XC6228D332 VR,其输出最大电流为300mA。
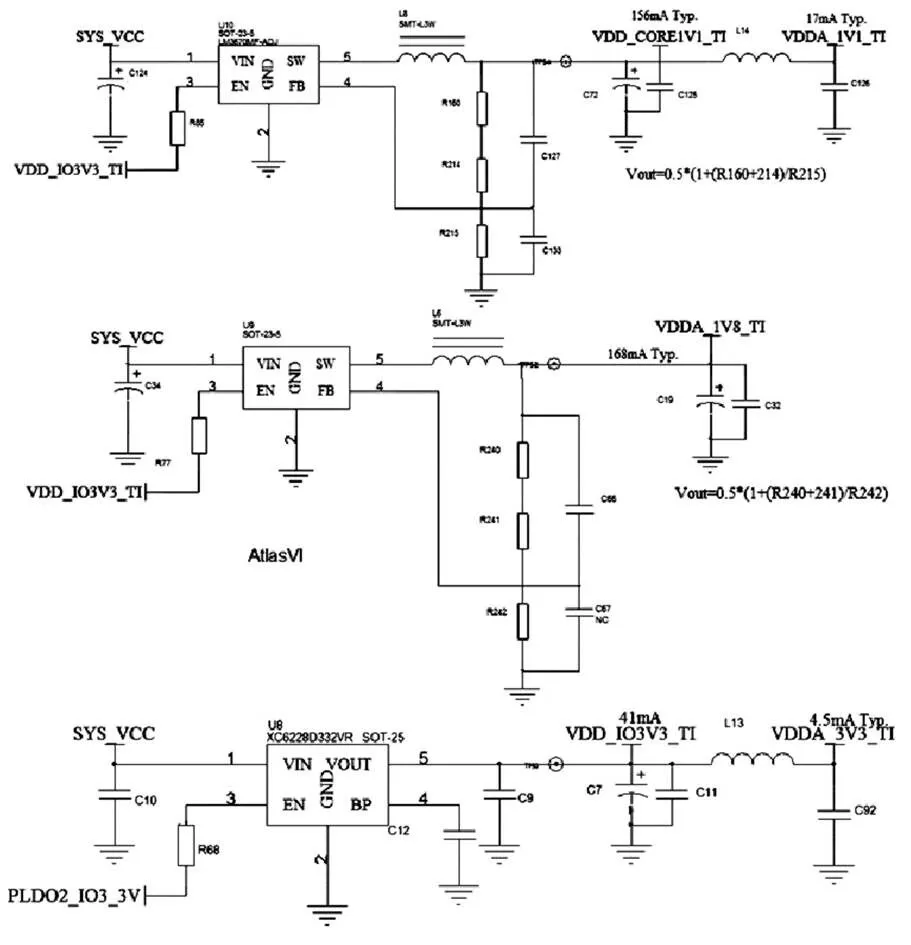
图4 视频ADC芯片TVP5158电源电路
1.4 视频DAC芯片CH7026电源系统设计
CH7026共有1.8V,2.5V,3.3V三组电源供电,分别由LDO XC6228D182VR、XC6228D252VR、XC6228D332VR提供,输出最大电流均为300mA。
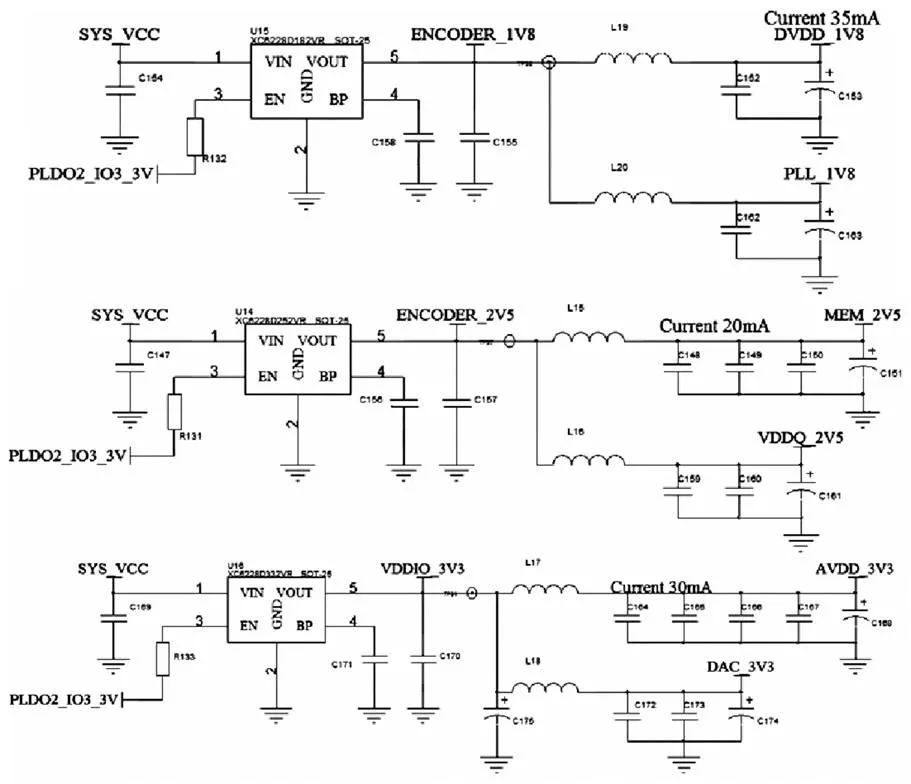
图5 视频ADC芯片CH7026电源电路
1.5 NAND Flash电源设计方案
NAND Flash采用独立的电源LDO芯片XC6228D332 VRK供电,输入电压范围:1.6~5.5V,输出电压3.3V,最大输出电流300mA,输入端放置100UF电解电容,保护Flash免受瞬间掉电的影响。
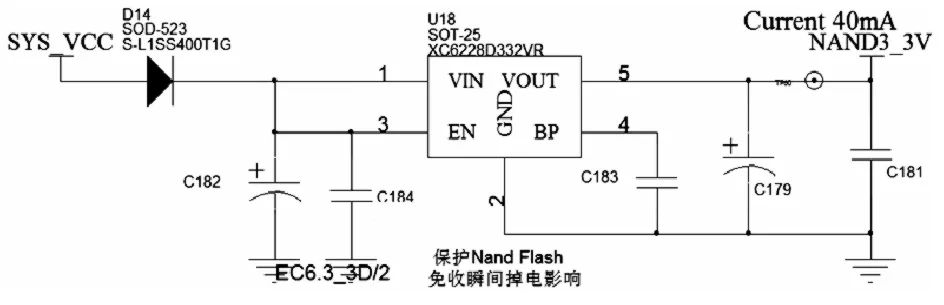
图6 NAND Flash电源电路
1.6 MCU电源设计方案
MCU由LDO TPS70950 供电,LDO输入电压范围:2.5 V 至 30 V,输出电压5V,最大输出电流200mA,前级加二极管和33欧电阻可增加回路输入电压值,并可在5V回路短路时保护12V电源回路上的器件。R164和R165为电源检测分压电阻,MCU根据R165端分压判断电源是否正常,检测到过压或欠压则关闭主DC-DC(LM22676)电源。
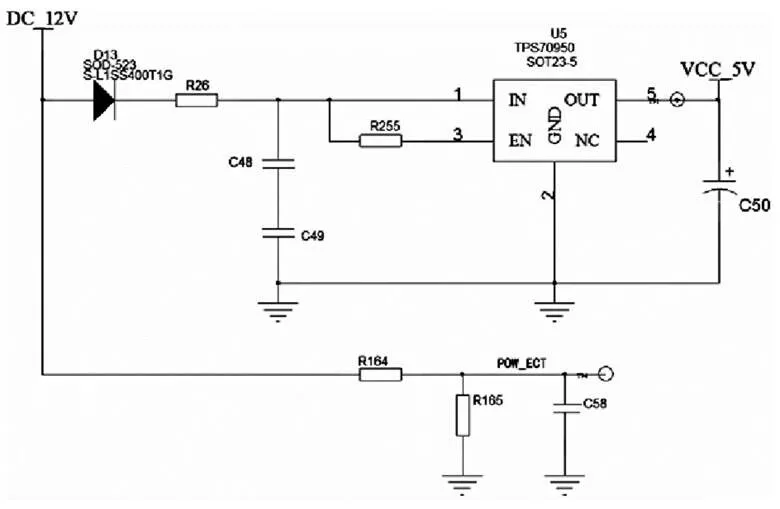
图7 MCU电源电路
1.7 摄像头供电控制电路
摄像头供电电压为12V,前级有滤波电路,由MCU I/O口控制摄像头上电,在每路电源输出端放置0.25A自恢复式保险丝,摄像头最大电流为100mA,0.25A满足设计要求,当摄像头故障过流时,保险丝所在电源回路等效断路,单路摄像头异常,不影响其余摄像头工作。SYS_VCC为预留5V摄像头供电网络,当摄像头为5V供电时,将原12V回路断开(去掉F1),R237电阻贴上即可。
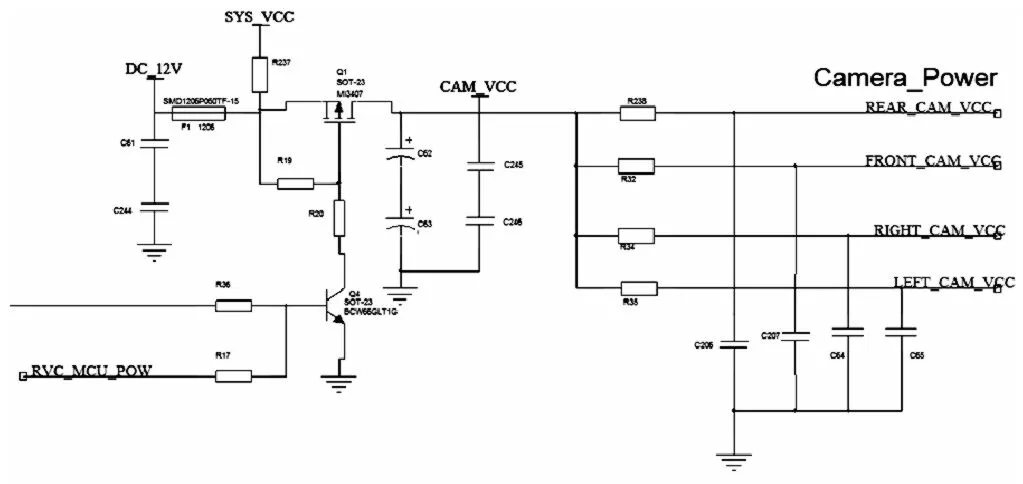
图8 摄像头供电电路
1.8 电源树
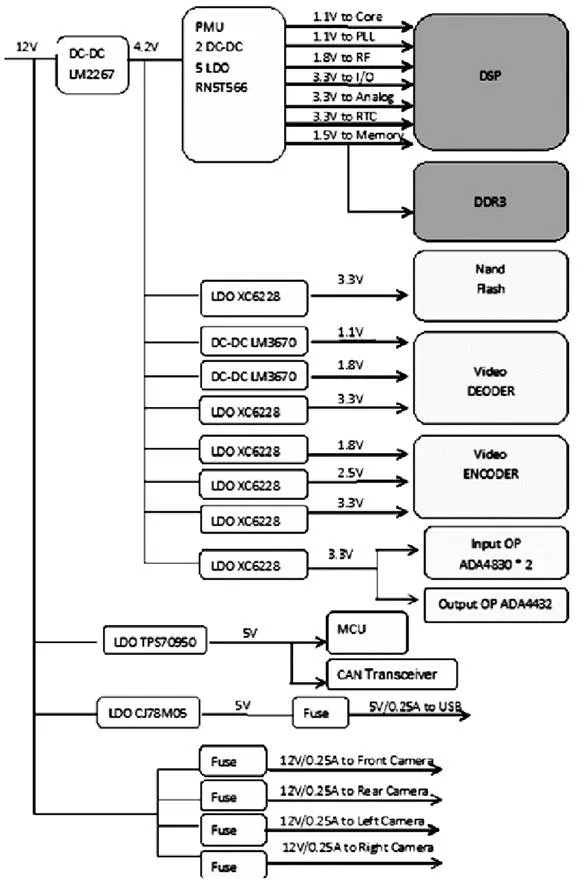
图9 系统电源树示意图
2 EMC设计方案介绍
EMC主要的设计思想为隔离干扰源、切断干扰传输路径、保护受扰体,主要设计方法为屏蔽、隔离、滤波、接地等。
本章主要从电路设计(包括器件的选择)、线路板设计、屏蔽结构、接地方式等几个方面进行考虑。
2.1 电路设计
2.1.1晶振电路设计
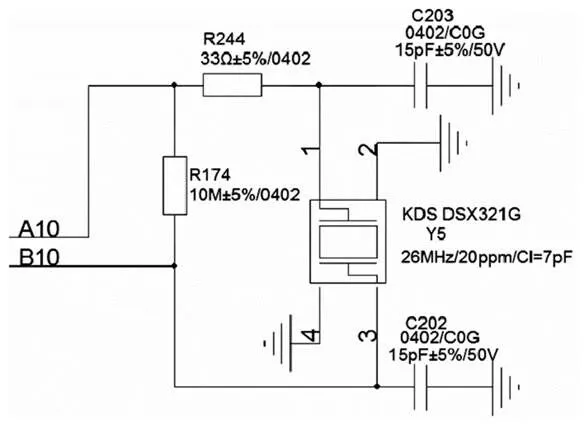
图10 晶振电路示意
针对晶振进行联调,功率匹配,来选择谐振电容,晶振回路上串接33欧电阻,在满足时钟振幅的情况下用来削减时钟的峰值减小RE辐射。
2.1.2USB接口设计
USB 接口电源和信号线上放置TVS管,当输入电压突然增大,超过阈值电平时,TVS管反向导通,提供快速电流泄放通道,从而将电压钳位在安全区域,后级电路得到保护。TVS管型号为:ESD5B5VL-2/TR,该器件具有小的漏电流和3PF的结电容,在不影响信号传输的同时具备出色的ESD防护能力,可承受超过±16 kV人体模型(HBM)电压,或承IEC61000-4-2规范中接触放电和空气放电±30kV。
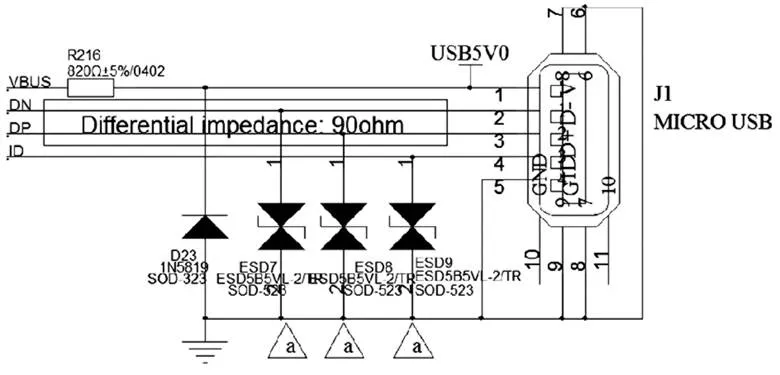
图11 USB接口电源电路
2.1.3CVBS视频信号输入接口设计
在视频信号输入口放置TVS管PSD24C,该TVS管ESD保护电压大于±25 kV。
CVBS视频信号输入端采用ADA4830单芯片高速差动放大器,该芯片集成最高18 V的输入过压(电池短路)保护功能,提供宽输入共模电压范围和出色的ESD鲁棒性。ADA4830的输入受ESD保护,可承受±8 kV人体模型(HBM)电压。将单端CVBS信号转化为伪差分信号,抑制不需要的共模误差电压。
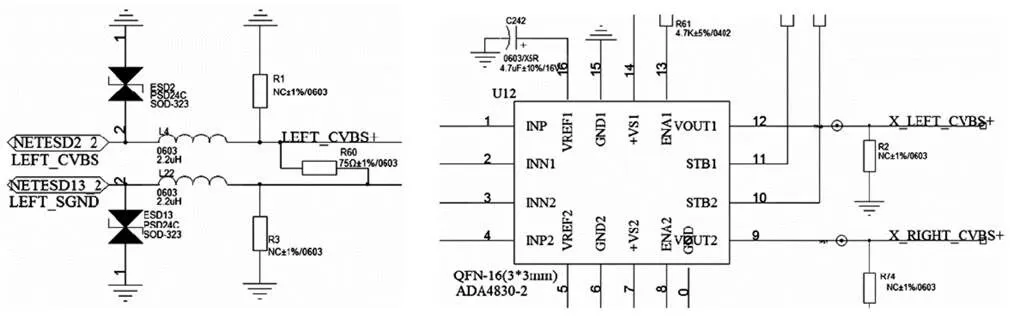
图12 CVBS视频信号输入电路
2.1.4CVBS视频信号输出接口设计
与CVBS视频信号输入口一样,在视频信号输出口放置TVS管PSD24C,该TVS管ESD保护电压大于±25 kV。
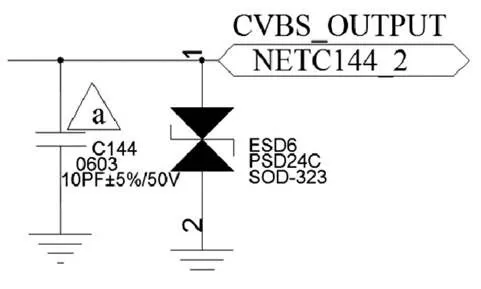
图13 CVBS视频信号输出电路
2.2 线路板设计
2.2.1层叠结构设计
全景控制器PCB采用六层板设计,层叠分别为L1:Top,L2:Power,L3:Trace1,L4:Trace2,L5:GND,L6:Bottom,层叠结构如下:
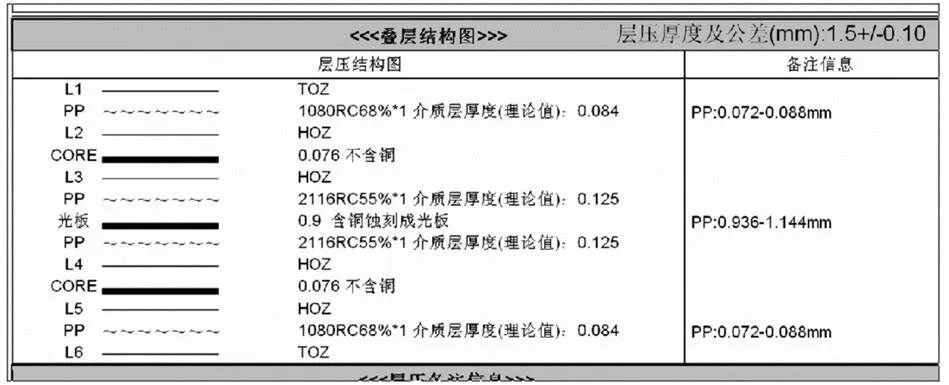
图14 线路板设计层叠结构示意
信号线尽量走信号层,表层和底层做大面积铺地,起到对中间层的电磁屏蔽作用。表层铺地充分打孔,避免出现孤立铜箔,防止出现天线效应。
2.2.2单板定位孔与走线的距离控制
单板上的定位孔与安装孔等是电磁能量向外辐射的通道,走线应与安装孔保持30mil以上的距离。
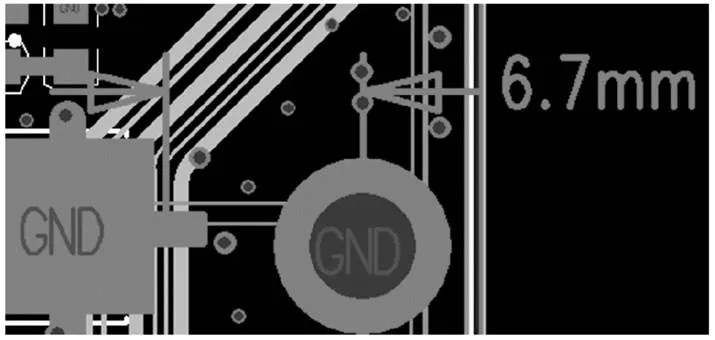
图15 单板定位孔与走线距离
2.3 屏蔽结构与接地设计
由于全景控制器采用的是金属外壳,本身就是一个良好的电磁屏蔽罩,故将机壳直接与PCB地相连,起到了良好的电磁屏蔽作用,在RE辐射方面有较强的抑制效果;同时对ESD也有很大的帮助。
3 总结
随着汽车智能化技术的发展,整车上复杂的电磁环境对车载控制器电源系统的设计影响多样,因此控制器尤其是视频类控制器的电源系统设计尤为重要。本文简要从系统主电源设计、视频芯片电源设计、摄像头供电设计、视频输入输出EMC设计、线路板设计等方面针对360°全景泊车控制器电源系统及其过程中的EMC设计进行了初步的设计分析,提供了一种电源系统设计思路,基于此的产品已经通过相关EMC测试并实现了整车量产。
[1] 德国BOSCH公司著,魏春源等译.BOSCH汽车电气与电子[M].北京:北京理工大学出版社,2004年7月第1版.70-86.
Design of a 360° panoramic parking Controller Power supply system
Li Donghao, Kan Jingjing
(The Key Laboratory of Anhui Province's Network of Intelligent Network, Technology Center of Jianghuai corporation, Anhui Hefei 230000)
The 360 °panoramic parking system uses four wide-angle cameras and corresponding image processing units to enable drivers to directly view 360 °panoramic views around the body through the display screen, and there is no visual blind area on the ground.It can help the driver to clearly confirm whether there are obstacles around the vehicle, help the driver to park easily and avoid scraping. This paper introduces the power system design of a panoramic parking controller from the design of the main power supply and the video chip power supply, and introduces the EMC design of the controller.
360°Around View Monitor;Power System;EMC
U462
A
1671-7988(2019)14-50-04
U462
A
1671-7988(2019)14-50-04
李东浩,就职于安徽江淮汽车集团股份有限公司技术中心,汽车智能网联技术安徽省重点实验室。
10.16638/j.cnki.1671-7988.2019.14.016
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
汽车工程师(2021年12期)2022-01-18
家庭影院技术(2021年6期)2021-07-28
家庭影院技术(2020年11期)2020-12-28
军民两用技术与产品(2020年3期)2020-04-07
英美文学研究论丛(2018年1期)2018-08-16
特别文摘(2016年21期)2016-12-05
科技资讯(2012年28期)2012-07-09
