
基于阈值标记的分水岭算法遥感图像道路提取
2019-07-31 02:07冯魁祥朱玲玲云海姣
长春大学学报 2019年6期
李 杰,冯魁祥,朱玲玲,云海姣
(1.长春大学 a.电子信息工程学院;b.研究生院,长春 130022;2. 苏州德沃智能系统有限公司,江苏 昆山 215300)
遥感图像中,道路提取对于城市规划、自动驾驶等具有重要意义[1-2]。目前研究主要包括Snake模型算法[3]、数学形态学提取法[4-5]、分水岭算法[6-7]。分水岭算法以其运行简单、易于并行化处理的优势,能准确地确定边缘。但同时也存在过分割问题。目前,主要算法有基于区域块的高斯混合模型聚类分割[8],算法耗时较长;基于内外标记的改进分水岭算法[9],难以解决过分割问题。本文提出的改进算法,通过多尺度形态学梯度处理,提取低频成分进行低通滤波,减少噪声影响,进行二维最大熵求阈值,去除伪极小值影响并求得阈值,通过阈值标记图像,完成分水岭分割。
1 分水岭算法

图1 分水岭算法示意图
分水岭算法是数学形态学上的一种基于拓扑理论的图像分割方法。基本思想[10]是把形态学的梯度图像看作是地形图,则梯度图像中每个像素点的灰度值都对应着地形中相应点的海拔高度,像素点灰度值的局部极小值区域形成集水盆,而集水盆的相应边界构成分水岭,如图1所示。
由于分水岭算法对微弱边缘具有良好的响应,直接运用分水岭算法进行图像分割时,通常会产生过度分割的现象。对原图像进行分水岭分割实验结果如图2所示。
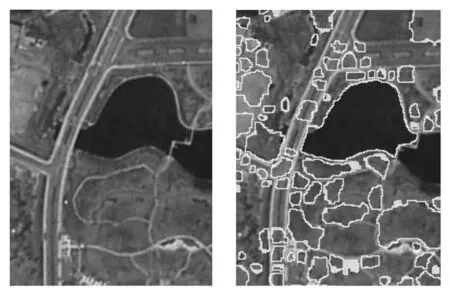
图2 直接分水岭分割效果
2 改进分水岭算法原理
图3为改进算法流程。基本原理如下:对原始图像进行图像增强,通过多尺度形态学梯度处理获得的低频成份以及彩色梯度图像,进行低通滤波去除噪声影响,利用最大熵求阈值去除伪极小值影响,通过阈值标记彩色梯度图像,获得分割结果。

图3 改进算法流程
2.1 图像增强
标准遥感图像存在对比度较低、边缘模糊等问题,遥感图像增强[11]可利用各种数学方法和变换算法提高某灰度区域的反差、对比度与清晰度,从而提高图像显示的信息量,使图像有利于进一步分析。选用直方图均衡化可以有效地增强图像对比度,提高遥感图像的清晰度与对比度。
2.2 多尺度形态学梯度
图像边缘提取一般都是通过对图像进行梯度运算来实现的。形态学梯度是用膨胀后的图像减去腐蚀后的图像得到差值图像[12],数学形态学能够实现形态学分析和处理算法的并行处理,使图像分析和处理的速度得以大大提高[13]。本文使用多尺度特性计算图像梯度。
设Ri=(min,…,max) 为结构元素b的半径,其最大值、最小值分别为Rmax、Rmin,rOi表示不同彩色分量的不同尺寸下的形态学梯度,ρi表示不同尺寸下的权值。多尺度形态学梯度OGrad用公式表达:
(1)
针对遥感图像的彩色信息,须在RGB空间计算彩色分量的梯度。令O代表待分割彩色图像,Oi(i=R,G,B)分别代表彩色图像O的RGB 的3个彩色分量。设彩色图像O的RGB的3个彩色分量的形态学梯度为Oi(i=R,G,B),彩色图像转换为梯度图像的定义为:
Grad=max{OR,OG,OB},
(2)
2.3 低通滤波
使用二阶巴特沃斯低通滤波( BLPF-2)有效地滤除影响图像细节噪声,具有较强的适应性,是有效的低通滤波与可接受的振铃特性之间的折衷[14]。进行二阶巴特沃斯低通滤波,首先将梯度图像Grad经过FF变换到频域中,获得频域梯度图像:
O(Grad)(u,v)=ζ[Grad(x,y)(-1)x+y] ,
(3)
频域内的梯度图像O(Grad)(u,v)上应用二阶BLPF获得LBLPF(Grad)(u,v)低频成分:
(4)
利用IFFT算法变换,获得空间域内的彩色图像梯度,用IBLPF(x,y)表示,即:
IBLPF(x,y)=(-1)x+yζ-1[R[O(Grad)(u,v)]],
(5)
其中,R(·)代表对[O(Grad)(u,v)]进行取实部计算。
2.4 采用二维最大熵求阈值
二维最大熵的图像分割算法,利用了图像各像素间的空间相关信息以及像素的灰度分布信息,采用由像素灰度和邻域平均灰度构成的二维直方图搜索阈值,获得较为理想的分割效果[15]。
设梯度图像IBLPF(x,y)的灰度级1,2,…,L,总像素数为N,各个灰度级出现的频率表示为f1,f2,…,fL。梯度图像中灰度为i、邻域灰度均值为j的像素点数由fij表示[16],IBLPF(x,y)的二维直方图为h(i,j)=pij,0≤i≤L-1,0≤j≤L-1。二维梯度图像的直方图可以用以下公式求出:
(6)
设在阈值(s,t)定义区域内,s示灰度值i的阈值,t表示像素邻域j的阈值,目标和背景的概率累计分布p1、p2分别为:
(7)
(8)
定义二维梯度图像IBLPF(x,y),目标和背景的二维熵为:
(9)
(10)
梯度图像总熵定义为:
(11)

(12)
最终选取的阈值H(*_s,*_t)满足:
H(*_s,*_t )=max{H(s,t)},
(13)
通过这种二维最大熵算法自动获取阈值,可以减少人设定阈值造成的误差以及伪极小值和噪声造成影响,获得较好的分割结果。
2.5 基于阈值标记提取道路信息

(14)
(15)
利用改进的分水岭算法处理得到遥感图像道路信息的二值图像,并对该图像进行形态学开运算,通过计算分割区域内灰度极值,并对道路边缘信息进行标记,从而实现移除面积较小的背景目标,结合道路长度大于宽度的特征规律,完成遥感图像道路信息的提取工作。
3 实验结果
选用的实验图像尺寸像素大小为188 × 260,测试平台是Matlab(R2014a)以及HALCON(12.0),CPU是Intel(R)Core(TM)i3-2330M,内存为8G的64位操作系统。实验及分割结果图4所示。
从图4(e)中可以看出,本算法能够有效地抑制过分割,有效去除背景信息,减少细节纹理的影响,使得道路信息细节清晰,便于道路信息的提取。由仿真得到的改进分水岭算法分割图可知,遥感图像在经过一系列的处理后,其中的道路信息基本不变,并且提取到的区域面积没有太大变化,说明分割的道路图像比较理想。对分割后图像进行归一化,去除小面积留下感兴趣的道路信息如图4(f)所示。

图4 改进分水岭过分割效果图
4 结语
本文提出了一种结合二维最大熵求阈值的分水岭分割算法,有效地减少了依据先验经验确定阈值造成的多余计算;结合二阶巴特沃斯低通滤波解决了噪声以及细节纹理在分水岭分割中的影响;运用道路长度大于宽度的特征规律,获取到遥感图像的道路信息。本文分水岭分割方法处理后道路信息可视效果好,具有较强的实用性。
猜你喜欢
声学与电子工程(2021年2期)2021-07-26
长江丛刊(2020年13期)2020-11-19
中国临床医学影像杂志(2019年2期)2019-04-25
兽医导刊(2019年1期)2019-02-21
电子制作(2017年1期)2017-05-17
百姓生活(2017年5期)2017-05-15
中国继续医学教育(2015年2期)2016-01-06
燕山大学学报(2015年4期)2015-12-25
中国当代医药(2015年36期)2015-03-11
振动、测试与诊断(2014年6期)2014-03-01
