基于聚焦曲面的快速聚焦算法的研究
2019-07-30 08:30:14张腾腾刘双广
现代计算机 2019年18期
张腾腾,刘双广,2
(1.重庆邮电大学通信与信息工程学院,重庆高校市级光通信与网络重点实验室,泛在感知与互联重庆市重点实验室,重庆400065;2.高新兴科技集团股份有限公司,广州510530)
0 引言
自动聚焦技术作为摄像机领域最基本、最核心的技术之一[1],其可分为主动式自动聚焦和被动式自动聚焦[2],前者主要是利用红外测距、超声测距等主动测距方法结合查表等方法驱动电机进行自动聚焦,后者主要利用清晰度评价函数对当前图像清晰度进行评价结合一定的聚焦搜索策略驱动电机完成自动聚焦。由于大倍率的摄像机的使用,聚焦速度减慢,主要有一下几种原因,第一,峰值搜索算法如爬山算法以及其优化算法,混合搜索算法、粗精两段式搜索算法不够优化,由于高倍率摄像机焦距变得越来越大,对于控制变倍的电机总步数也相应的增加而导致搜寻的次数逐渐增多,这个无法避免;第二,应用场景复杂,低照度,低对比度,且没有具有特性的目标物,导致目标物距获取困难;第三,高分辨率的图片,计算量大[3];第四,聚焦曲线测量困难,使用查表法等主动式聚焦数据量大,查表速度慢。
为了解决大倍率摄像机聚焦慢,物距难以获取的问题,本文通过对不同物距下的聚焦曲线(变焦曲线)[1-2,4]的研究,通过合理选择测量物距,将所测量的聚焦曲线拟合成对焦曲面,通过分析当前聚焦位置反查出目标物距信息,利用此物距信息和聚焦曲面进行变焦跟踪处理,使得在进行变倍的同时进行聚焦从而加快聚焦速度。但由于聚焦曲面存在误差,本研究通过对放缩后的图片使用快速DCT 变换的数字处理的方法实现快速准确地聚焦。同时由于使用聚焦曲面,可以根据当前的聚焦位置信息从而粗略的获取当前目标的物距,对目标信息的获取,具有一定的参考意义。
快速聚焦技术主要为了解决大倍率变焦摄像机聚焦慢,其根本原因在于相同倍率下不同物距时的聚焦位置差别较大导致,通过研究不同物距下的聚焦曲线拟合得到聚焦曲面参数,利用这些参数快速驱动聚焦电机到达聚焦位置附近,从而大幅度缩短聚焦时间,之后利用合适的数字图像处理的方法进行精确聚焦即可。聚焦曲面的测量和拟合、数字图像处理的选择是快速聚焦的两个组成部分。
1 聚焦曲面
镜头作为摄像机核心的器件之一,决定着摄像机的诸多性能,如倍率、视场角、中心偏移、图像效果等,其主要由控制变倍镜片的变倍电机(Zoom 电机)、控制聚焦镜片的聚焦电机(Focus 电机)、控制采光量的光圈电机(Iris 电机)、控制滤光的滤光片电机(Ircut 电机)如图1 所示。
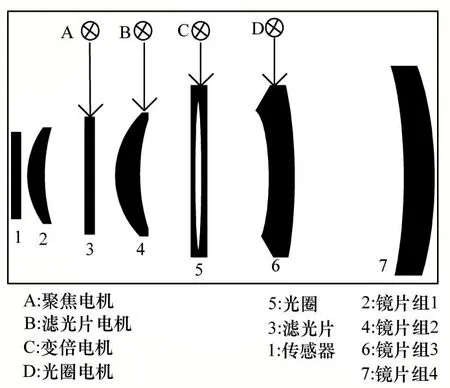
图1 摄像机镜头内结构示意图
不同镜片组结构可能不同,但与自动聚焦直接相关的就是Zoom 电机和Focus 电机,电机每一个位置对应一个电机步数,即Zoom 电机的步数称为Zoom,Focus 电机步数称为Focus,当聚焦目标不变时,在可以聚焦清晰的物距下,每一个Zoom 都有唯一的一个Focus与之对应使得在传感器上的图像最清晰,所有倍率下的Zoom-Focus 数据构成该物距下的聚焦曲线[1]。如图2 所示是不同物距下的聚焦曲线图,不同物距的聚焦曲线形状几乎相同,但在最大倍率的时候不同物距上的聚焦值相差最大,对于小倍率摄像机来说,其焦距较小,所以在最大倍率的下不同物距下的Focus 相差不大,但对于大倍率摄像机来说,由于焦距变大,导致最大倍率时不同物距下Focus 相差很大,最大可达全程的50%,在物距较大时突然大倍率变倍时,聚焦搜索范围是最大的,可达全程的50%以上。
传统摄像机一般只测量最远的一条聚焦曲线作为加快聚焦使用,但由于大倍率摄像机聚焦可调范围较大,且不同物距下的聚焦值变化较大,导致搜索次数增加而聚焦变慢。由多条聚焦曲线根据拟合可以生成三维曲面,此曲面自变量为物距和Zoom 值,因变量为Focus 值。

图2 不同物距下的聚焦曲线图
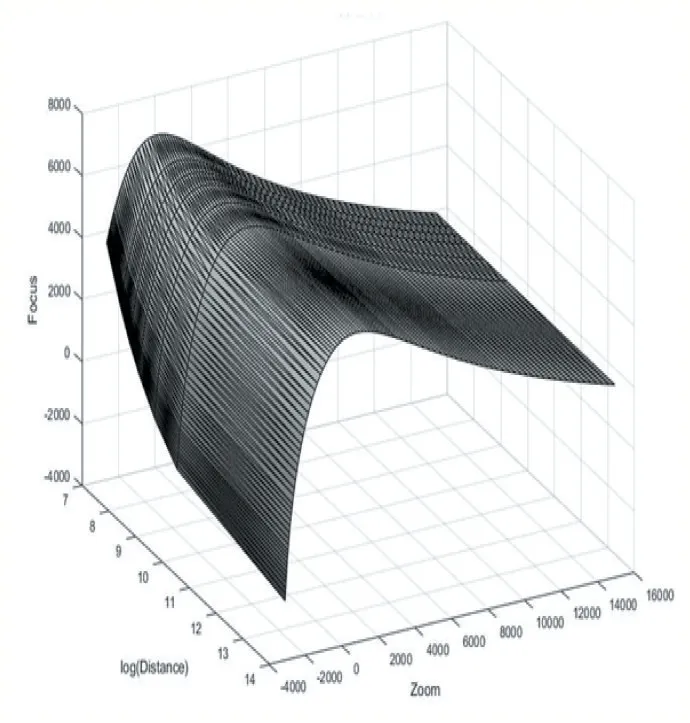
图3 聚焦曲面图
如图3 所示,此曲面具有一下特点:
(1)物距越大,聚焦曲线变化率越小,物距越小,聚焦曲线变化率越大。
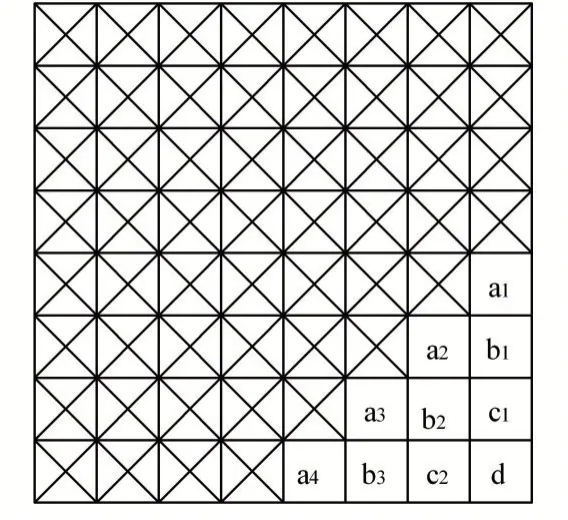
(2)曲线存在单峰值,记Focus 最大时Zoom 为Zoommax,当Zoom>Zoommax时,曲面变化很小,几乎成为一个平面,Zoom (3)物距大于1200 米曲线变化很小。 为了方便我们进行数据测量、拟合以及后期使用,我们使用等分最大倍聚焦值法进行测量物距的确定,使用等分1200 米的聚焦曲线,从而得到合理的变倍位置得到合理的采样点,之后对一一进行测量聚焦点,使用二元四次多项式拟合得到聚焦曲面的拟合参数,拟合方程如下: 其中a0~a1为拟合参数,D 为当前的物距值,Z 为当前的倍率值,即Zoom 值,距的获取,当前的物距值可以通过使用激光测距来实时获取。 由于主动测距方法的固有缺陷是的使用聚焦曲面的方法实现聚焦不能做到准确聚焦,一般由于外界因素如碰撞,震动或者测量数据不准导致聚焦曲线发生变化,而不能做到准确聚集,但是这种变化是微弱的,会导致曲线变化很小,故需要在聚焦位置进行精确的聚焦搜索,但这种搜索,不是为了加快聚焦速度,而是为了进行精准聚焦。 数字图像处理依据采集的图像进行清晰度计算,从而驱动电机进行聚焦搜索[5],根据对焦窗口、清晰度评价函数、对焦搜索算法等不同,而形成了很多对焦算法。一般是针对高分辨率的图片为降低计算量而需要选择合适聚焦窗口,目前存在的对焦窗口的选择方法有中心选取和多区域选取法等固定窗口选择算法,但由于固定聚焦窗口算法存在着不能准确找到聚焦目标的问题,近两年来,研究者使用较多的是自适应窗口选取法。本研究使用一种抽稀放缩的方法对图片进行放缩,在降噪和考虑了全局画面的同时缩减聚焦窗口,减少计算。 考虑到摄像机所使用的复杂场景,且可直接输出YUV 数据,聚焦窗口必须以整个画面为窗口进行清新度评价,但真对高分辨率的图像来说,全局检测是非常慢的,尤其是使用DCT 变换的方法[6],对于大尺寸图片,其运算量非常之大,为减少计算量,本研究采用的方法是同时使用均匀抽稀和放缩法来减小图片尺寸。首先获取3840×2160 的4K 分辨率图像的灰度信息,之后对灰度信息进行抽稀从而缩小图片的尺寸,之后对抽稀后的图像进行放缩,进一步缩小图片尺寸,最后对放缩后的图片进行清晰度计算,如图4。数据经过抽稀后,数量大量减少,并且基本保证能反映原图形或曲线的基本形状特征,能够为进一步的处理节省空间和时间。 图4 抽稀结构图 考虑到需要对全图进行清晰度评价的同时缩小图片尺寸来减少计算量,本研究使用抽稀放缩法进行构建清晰度评价窗口,原因有以下三点,第一,由于监控摄像机应用场景广泛,可能会出现部分遮挡的情况,不能只利用局部的清晰度评价值来作为全图清晰度值,防止发生近限聚焦(聚焦在较近的物体上);第二,4K分辨率图片数据量大,相比较而言,任何在此基础上的计算都是非常慢的,无法做到实时处理,而由于相邻数据变化最小,考虑使用抽取相邻数据进行缩减尺寸,但抽取量又不能大少,以防止发生严重失真;第三,抽稀后图片相比较小,可以使用差值进行缩放,以弥补由于抽稀导致的失真,同时进一步减少尺寸,加快计算。 清晰度评价函数必须具有高灵敏度、单峰性、抗干扰性和简洁性[7],以保证能够区分离焦和对焦状态的图像。其函数有很多,基于统计信息的清晰度评价函数,基于变换域的清晰度评价函数,基于灰度的清晰度评价函数。 由于通过抽稀放缩法确定的图形尺寸非常小,可以使用效果较好的DCT 变换进行清晰度检测,但由于传统DCT 变换比较耗时,且在变换后只有高频分量得到使用,低频部分也需要计算,故本算法使用改进后的快速DCT 变换: 其中:写成矩阵形式为:F=ATfA。 传统DCT 变换使用原始公式进行计算,每次都需要计算大量三角函数,而快速DCT 变换使用提前计算好的系数矩阵进行计算,省去大量三角关系计算,本算法在快速DCT 变换的基础上研究发现,低频部分变换系数并未使用到,但却进行了计算,进而造成了计算上的冗余,可以只针对部分高频参数计算从而进一步加快计算,如图5 所示,其中计算公式为: 图5 DCT变换结果取样图 由于越靠近右下角对应的高频参数越重要,故使用四个参数来强调高频参数,其中,4α+3β+2γ+δ=1,且0<α<β<γ<δ<1,由于只是用最后四行和四列的局部数据作为最终结果,故在矩阵A( )i,j 中的前三行也可以不用计算,最终参与计算的A( )i,j 如下: 有了较合适的清晰度评价函数后,需要结合一定的聚焦搜索策略才能快速的做到准确聚焦,这也是提高聚焦速度的关键。 聚焦搜索算法主要是依据评价函数的结果进行最佳位置的搜索,由于评价函数都具有较好的单峰性,所以搜索算法只需要找到峰值即可完成对焦操作,最经典的算法就是爬山算法[8]。 无论何种聚焦搜索算法,其主要目的就是利用清晰度评价结果快速的找到峰值,以完成快速聚焦。但在本研究中,由于使用了聚焦曲面,快速驱动电机到达聚焦最佳位置附近,但却不能保证每次均是最佳聚焦,且当图片属于高噪声、高度模糊时,无论何种聚焦评级函数都会出现扰动,而出现伪聚焦峰值,导致电机移动方向被改变,而造成错误的聚焦、或者聚焦不清等现象。在本研究中我门采用在聚焦曲面一定范围内进行聚焦搜索,即二次局部全搜索算法,该范围随着倍率的增大而增大,这是根据倍率越大,聚焦曲面在同一倍率下的聚焦值变化越大的特点所决定。 根据所使用的摄像机的物焦曲线以及聚焦曲面拟合误差可以确定此范围最大值,假设聚焦区间总的数值为M,物距最小时最大倍率的聚焦值为F1,物距最大时最大倍的聚焦值为F2,而聚焦曲面拟合误差为E,则需要根据((F1-F2)/M,E,Zoom)三个数值共同定义搜索空间,其类似于聚焦曲面的上下聚焦范围。获得此聚焦范围后,在此范围内,首先进行一次大步长的全局搜索,这个操作使我们可以获得一个归一化聚焦评价曲线,之后,寻找到最大值后,进一步缩小区间,进行精细的小范围局部搜索,之后同样获得一个归一化聚焦评价曲线,最后利用该曲线便可以确定最佳峰值位置。由于在聚焦峰值两侧图像清晰度具有对称性,可以根据对称性来指导聚焦搜索,以确定最佳的搜索位置。 实验选取了的摄像机为33 倍智能高清网络摄像机镜头,对实际环境进行观测,获得了多个场景的聚焦图像,算法首先将4K 分辨率的图片每隔4 行(列)取一行(列),将原3840×2160 大小变为960×540,之后通过缩放图片将其变为384×216。限于篇幅,在此给出其中一种场景的实验对比结果,场景如图6。 图6 实验场景图 实验使用MATLAB R2017 在Windows 64 位系统中进行仿真,使用本研究所提算法结与其他算法进行比较,试验中α=0.25,β=0.1,γ=0.15,δ=0.3,仿真结果如图7。 图7 仿真结果 表1 各评价函数用时比较 由上述实验结果可以看出,速度最快的是基于灰度检测的算法,但考虑到归一化评价函数的灵敏性来说,传统快速DCT 变换以及本研究算法对其的改进灵敏性最高,而从运行时间上来说,而本研在速度和效果上均优于传统快速DCT 变换,本算法的改进DCT 方法运行时间不到传统快速DCT 的1/10,证明了算法正确性和有效性。 将本算法应用于33 倍自研摄像机,结合激光测距对实际场景进行自动聚焦,聚焦时间如表2。 表2 实际场景聚焦时间表 在表2 中,远距离选取的是800 米建筑物,中距离选取的25 米建筑物,近距离选取的是3.5 米带有条纹的平面,而大倍率是在Zoom 为-3032(放大约29 倍),小倍率是在Zoom 为13656(放大约2 倍)。由上表可以看出,当处于小倍率时,本研究所提算法,搜索区间较小,搜索次数较少,但是当处于大倍率下,由于聚焦搜索区间较大,搜索次数较多,导致聚焦时间变长,而在以上场景中平均聚焦时间为3.707 秒,只进行两次聚焦搜索,在聚焦时间有所优化。 针对大倍率监控摄像机快速聚焦的要求,本文提出一种基于聚焦曲面为核心的快速聚焦的方法,同时针对4K 分辨率的图像使用抽稀放缩法缩减数据量,使用改进型快速DCT 变换作为评价函数,结合聚焦曲面的使用,提出了二次局部全搜索算法进行峰值搜索。实验结果表明,该方法可以通过快速驱动聚焦电机到达清晰度最佳位置附近,之后仅进行二次局部搜索即可确定最佳聚焦位置,实现了大幅度减少聚焦时间。但该算法仍存在不足,由于高度模糊的图片亮度增加,而使用抽稀放缩法损失了一定的细节成分,导致图像在高度模糊聚焦值异常增加,不利于聚焦搜索,故可以通过对图片的模糊度进行检测,利用检测结果来修正DCT 变换结果,将是本研究今后的方向。
2 数字图像处理
2.1 聚焦窗口

2.2 清晰度评价函数



2.3 峰值搜索算法
3 算法实验及分析
3.1 仿真实验及分析



3.2 实际场景实验及分析

4 结语
猜你喜欢
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:24
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:42
家庭影院技术(2020年11期)2020-12-28 01:22:30
锦绣·上旬刊(2020年3期)2020-06-08 09:43:52
理科考试研究·初中(2018年10期)2018-12-11 08:11:28
艺海(2018年3期)2018-05-17 16:28:36
电测与仪表(2015年15期)2015-04-12 00:43:48
河北科技大学学报(2015年5期)2015-03-11 16:16:37
声学技术(2014年2期)2014-06-21 06:59:08
中央民族大学学报(自然科学版)(2014年1期)2014-06-11 01:28:38