日本空运型堰塞湖抢险工程机械的研发
2019-07-27 06:11何秉顺王文科陈尧贺鑫焱
中国应急救援 2019年4期
何秉顺 王文科 陈尧 贺鑫焱
1 引言
2018年10月11日、17日,西藏自治区昌都市江达县和四川省甘孜州白玉县交界处、西藏自治区林芝市米林县先后发生山体滑坡形成堰塞湖,分别造成金沙江、雅鲁藏布江断流。10月29日、11月3日,雅鲁藏布江、金沙江原址分别再次滑坡形成堰塞湖。险情发生后,由应急管理部牵头,相关部门和单位密切配合,科学有效处置,积极开展救援救灾,成功处置了4次堰塞湖险情[1]。
回顾4次堰塞湖处置过程,前3次堰塞湖由于存在时间较短、现场交通不便,没有采取人工干预泄流方式。在第4次金沙江“11·3”白格堰塞湖应急处置中,考虑堰塞体自然溢流可能造成的严重破坏,前方指挥部及部际联合工作组决定尽快采取人工干预措施,采用机械开挖泄流槽,降低堰塞体堰顶高程,减轻灾害风险。考虑大型工程机械进入堰塞体为应急处置的关键难题,探索通过陆路、水路、空中运输方式,齐头并进,争取尽快打通运输通道,共运输13台挖掘机、6台装载机及油料等物资上坝。经过紧张施工,于11月11日16时完成最大开挖深度15m,顶宽42m、底宽3m,长220m的泄流槽,共计完成土石方工程量13.5万m3。
一旦决定人工干预进行堰塞湖应急处置,如何把大型工程机械投送到堰塞体,是最关键的环节。在堰塞湖应急处置的多数情况下,由于通往堰塞体道路堵塞或损坏,直升机载荷无法达到要求,水路运输受制于运输船只和码头,大型工程机械难以快速运抵现场开展施工作业。日本和我国类似,对极高风险、高风险的堰塞湖一般也采取开挖泄流槽等人工干预方式降低堰塞湖水位,减少溃坝洪水风险,但亦同样面临交通中断、恶劣自然条件下难以快速投送抢险救援装备的问题。在2008年宫城·岩手地震诱发的堰塞湖抢险中,日本采用了直升机投送、大型挖掘机械分解的方案,并探索了危险地带远程遥控、无人化施工的方式。根据堰塞湖抢险救援实际需求,日本于2010年研发了空运型大型工程施工机械。本文将介绍日本空运型挖掘机的研发经验,以期为我国类似装备设计、生产和堰塞湖抢险救援提供启发和借鉴。
2 空运型挖掘机的设计
2.1 背景和约束条件
在2008年宫城·岩手地震诱发的堰塞湖抢险中,针对危险性较高、溃决后对下游危害严重且有时间进行人工干预的堰塞湖,日本采取了机械开挖泄流槽、加固河床和两岸山体边坡、抽排堰塞湖水的应急工程措施[2]。为了解决道路中断情况下大型施工机械的投送问题,日本采取了将挖掘机(铲斗容积0.23m3及0.5m3)拆解,采用民用直升机吊装至堰塞体,再进行组装的投送方案(见图1、图2),探索了危险地带远程遥控、无人化施工的方式。
应急抢险结束后,日本国土交通省进一步总结经验,组织东北地方整备局研发了空运型挖掘机(铲斗容积1m3),强化了无人化施工功能,并在日本多地部署[3]。2011年8月,12号台风带来暴雨洪水侵袭日本纪伊半岛,导致奈良、和歌山等地出现17座堰塞湖,在奈良县栗平、长殿堰塞湖抢险处置过程中,共投入了1m3级空运型挖掘机2台、0.5m3级6台,取得了良好的应用效果。
根据日本的经验,空运型挖掘机的研发约束条件是:
(1)采用常规民用直升机吊运,考虑温度和海拔高度的影响,分解零件的重量不得超过直升机载重能力,且能够保持吊运平衡状态;
(2)满足施工工期需求,采用施工能力大的挖掘机,尽最大可能压缩拆解组装时间和运输次数。

图1 挖掘机拆解

图2 直升机吊运拆解部件
2.2 设备研发
2.2.1 确定拆解构件质量
日本国土交通省东北地方整备局调查了日本民用运输直升机现状,现存吊运能力为5t的1台、3t的8台。考虑到吊运能力为3t的飞机数量较多,抢险救援时容易调用派遣,故以吊运能力为3t的直升机作为运输工具对象。考虑到直升机吊运重量根据温度和海拔高度的不同而变动,参考以往的灾害发生地点海拔高度、灾害发生时间的气温,并考虑到吊运物体稳定性的因素,确定拆解零件块的最大重量为2800kg(海拔高度按500-1000m、气温按20-30℃、吊运物重心稳定)。
2.2.2 构件拆解方案
按照小于直升机最大吊装载运能力(2800kg),根据铲斗容积1m3挖掘机构件组成,初步分解成11块,但底盘(约5600kg)及配重(约5400kg)的质量均超过2800kg。对于底盘,分解成为左行驶架、右行驶架、下部转向架三部分,拼接采用加工方便的法兰式,确保连接强度达到要求。配重分解为上下两个部分,每部分重量均小于2800kg,上下两部分配重采用插销方式连接。通过上述拆解方式,总重量25.8t的挖掘机被拆解成14块(图3)。

图3 空运型挖掘机拆解图(14块)
2.2.3 提高拆解组装效率
在2008年宫城·岩手地震诱发的堰塞湖抢险使用的挖掘机,需要在工厂花费3d时间拆解液压管路和电气线路。为了提高拆解组装效率节约时间,研发的空运型挖掘机液压管路电气线路的连接采用“插拔式”方式(图4),可容易进行装配。另外,为了防止错误的电路、油路管线连接,对管线附上不同的颜色标识。通过上述改进措施,设备的拆解可在1d内完成。

图4 插拔式油路管和电路插口
2.2.4 强化无人化施工功能
在宫城·岩手地震因余震引起的崩塌和降雨造成的泥石流等危险地点施工中,抢险队伍探索了远程控制的无人化施工机械,施工效率为有人操作的60%,虽然施工效率低,但确保了施工人员的安全。因此,能够防止崩塌、滑坡、泥石流等次生灾害对施工人员的伤害,确保施工抢险人员零伤亡。研发的空运型挖掘机将远程操纵装置作为标准配置,采用目视+操作手柄、挖掘机加装摄像头+显示屏幕+操作手柄的两种方式远程操作挖掘机(图5)。
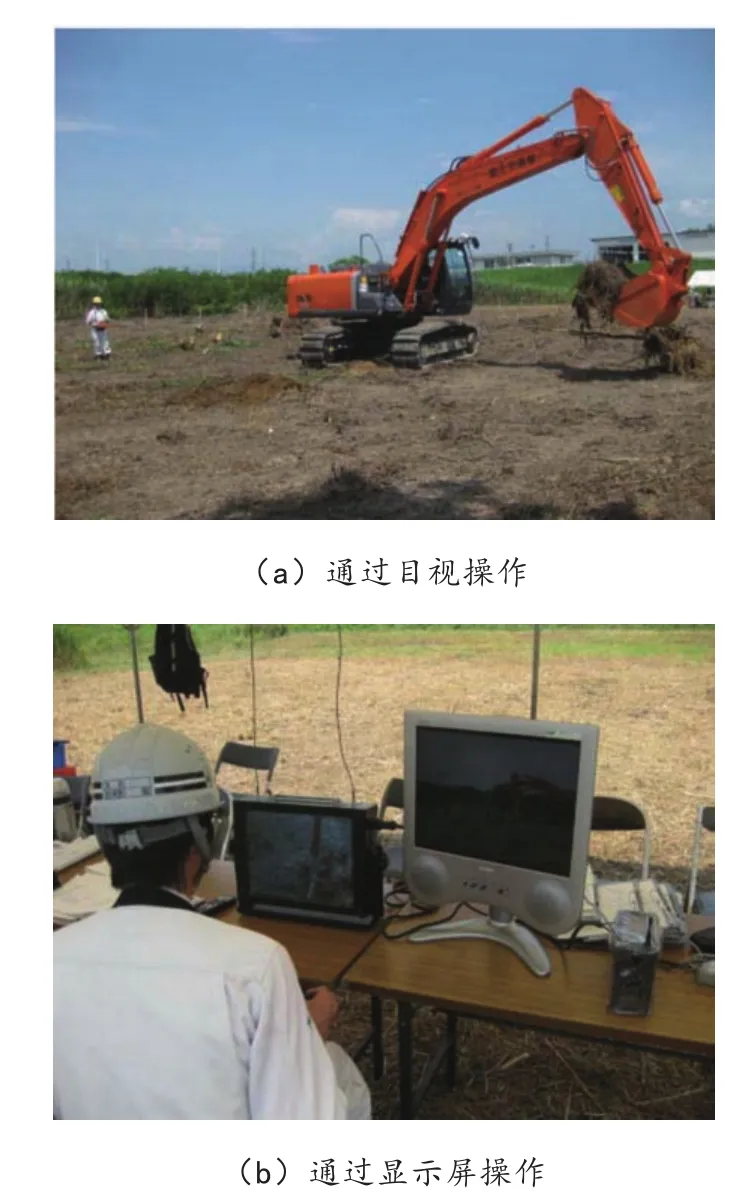
图5 无人化施工两种操作方式
2.2.5 铲斗替代配件
根据抢险现场的施工需求,设计的空运型挖掘机铲斗可替换为各种配件,不需要对设备主体进行改造,包括液压破碎机、起重吊勾、抓斗等,如图6所示。液压破碎机可用于岩石破碎、结构破拆等,在堰塞湖抢险现场时,可采用液压破碎机破拆影响湖水泄流的巨石、倒塌的建筑物等;在挖掘机铲斗上加装起重吊钩(但仍要确保铲斗总重不能超过2800kg),可在施工现场吊装各种装备和建筑材料,相当于在现场配备了起重机;抓斗,包含圆锯,用于现场倒塌树木的切割、搬运、清理等。

图6 铲斗替代配件
3 结语
日本国土交通省组织研发的空运型挖掘机(铲斗容积1.0m3级)根据堰塞湖抢险的需要和制约条件,是在常规的挖掘机上改造而成的。与以往应用的挖掘机相比,具有以下优势:(1)通过优化拆解方案,拆解、空运、组装的时间缩短了5.5d;(2)与0.5m3级相比,施工能力几乎加倍,缩短了施工工期;(3)增强了防止次生灾害的远距离操纵功能;(4)增加了满足多种作业要求的配件。此外,日本还制作了包含拆解、空运、组装、安全管理等内容的《灾时空运应对手册》,以指导空运型挖掘机实际应用,在日本多地部署,并在日本东北、四国等地区多次组织操作培训和训练。
金沙江“11·3”白格堰塞湖应急处置完成后,针对高海拔地区堰塞湖抢险救灾工作中暴露出的大型工程机械难以迅速到位的问题,国家应急管理部正在组织工程机械制造企业研发适合于空运的工程机械[4],毫无疑问,日本空运型挖掘机的研发经验对我国类似装备设计生产和堰塞湖抢险救援具有极强的启发和借鉴价值。
猜你喜欢
大众文艺(2022年19期)2022-10-19
军事文摘(2022年19期)2022-10-18
数学小灵通·3-4年级(2022年3期)2022-03-17
英语文摘(2020年8期)2020-09-21
水利水电快报(2019年5期)2019-09-10
兵器知识(2018年5期)2018-05-30
电子技术与软件工程(2017年18期)2018-01-28
航空知识(2016年4期)2016-11-19
百科探秘·航空航天(2015年11期)2015-11-07
百科探秘·航空航天(2015年10期)2015-11-07