风电场一次调频控制策略研究
2019-07-26 07:30:32王明扬
沈阳工程学院学报(自然科学版) 2019年3期
王明扬,白 迪
(沈阳工程学院 a.研究生部;b.电力学院,辽宁 沈阳 110136)
随着风力发电对电网的渗透不断地增加,这给电力系统安全稳定运行带来了一系列的挑战,尤其是在有功功率控制方面。风电场调频的目的是当电网频率发生变化时,同步发电机会响应这种变化,风电场也会迅速改变其输出有功功率并参与频率恢复过程。与同步发电机相比,由于风的随机性,风电场的频率调节将更难以实现。
双馈式风力发电机(DFIG)是风电行业中使用最广泛的机型。其基本原理是通过电子变换技术调节风电机组的输出与电网同步,实现转子转速和电网频率的解耦,避免了对转子转速的苛刻要求。通过转子侧变流器控制转子电压,可以在一定程度上单独控制DFIG的有功和无功功率输出,但也无法响应系统频率的变化。目前的风电场通常采用最大功率-转子速度曲线,在不同风速下进行最大功率跟踪。因此,在系统频率下降时无法提供有功功率。随着电网中风电渗透率的增加,电网中将需要配置更多的旋转备用容量来消除瞬时的功率不平衡。因此,为了使风电场具备频率调节能力以及响应电网频率变化,风电场必须预留一些有功功率,这就使风力发电机必须从最大功率跟踪状态转移到次优点发电,这也必然导致风电场的经济效益降低。文献[1-3]研究风力风机的旋转质量释放能量;文献[4]从最大有功功率跟踪曲线减载风力机运行,以实现有功储备。本文的研究重点是风电场频率调节能力,将结合桨距角、转子速度控制以及惯性控制。通过对比转子速度控制(RSC)与惯性和桨距角控制(PAC),验证了在使用不同的控制方式下,对系统频率最低点的改善,实现短期和长期调频控制。
1 风电机组参与一次调频的基本原理
在电力系统中,通过平衡发电机发电量与负荷需求之间的关系来控制频率。当发电机突然发生故障或接入大型负载时,系统频率开始跌落,其跌落速度取决于系统的转动惯量,此时发电厂需提供额外的频率响应,即一次和二次调频。一次调频是有差调节,由发电机自动调速器提供额外输出功率,限制电网频率的变化,持续时间为10~30 s;二次调频采用慢速调频控制环节将频率恢复到额定值,持续时间为30 s~30 min,为无差调节。随着变速风电机接入的增加,系统的转动惯量降低,响应系统频率变化的能力下降。但风机转子中旋转的动能较为可观,通过调整转子转速控制策略,使机组能够响应系统频率的变化,具备类似于传统机组的惯性响应特性,其惯性时间约为2~6 s。当频率偏差超过一定限值时,通过变速系统调节机组出力,从而参与系统的一次调频,为系统频率提供频率支撑[5]。
2 双馈风电机组的调频策略
2.1 惯性控制
转子惯性控制(Inertial control)是风电机组运行过程中,通过改变机组转子侧变流器的电流给定,控制转子速度发生临时性变化情况时短时释放/吸收风电机组旋转质体所存储的部分动能,以快速响应系统频率的暂态变化。
对于同步发电机,当电网频率下降时,同步机转速降低,旋转动能释放。对于风电场,需要附加额外的控制环节,如图1所示,需要添加功率控制,以在电网频率偏移期间利用存储在风机叶片以及转子中的动能。风机具有的旋转动能E可由转子转速ω和转动惯量J表示为

从旋转质量提取的功率描述如下:

发电机组利用其旋转动能维持功率输出持续的时间称为惯性时间常数,可将其定义为

式中,ωs为转子额定转速;S为视在功率。
将式(2)中J代入式(3)中,用标么值表示为

所释放的功率与等效转动惯量J、转子转速ω和转子转速的变化率dω/dt有关。对于耦合电网频率变化,式(2)中的dω/dt由惯性控制回路的电网频率变化率dfgrid/dt代替,如图1所示。式(2)中的系数J、ω可以用作控制系数Kic。利用风机转子转速ω,从DFIG的功率-转速特性曲线获得最优功率信号Popt。当电网频率改变时,惯性控制回路负责将附加的功率调节信号ΔPic发送到参考功率Pref。Pref和Pmea之间的功率误差信号Perr由转子侧变流器控制,调节发电机转子电流Iqr。在DFIG控制器中增加一个辅助控制回路,使叶片惯性响应支持电网中的一次频率控制。
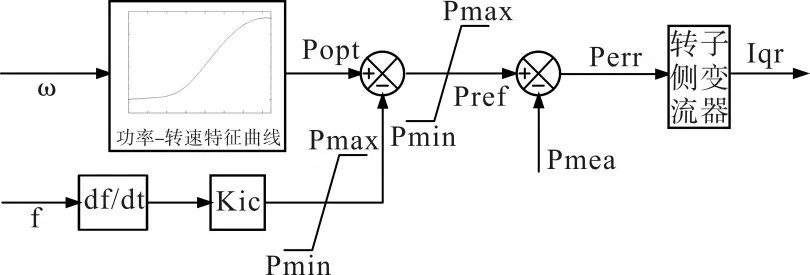
图1 双馈风力发电机惯性控制
2.2 桨距角控制
桨距角控制(Pitch angle control)是通过改变桨叶的迎风角度限制风机输入的机械能量,使其处于最大功率点之下的某一运行点[6],从而留出一定的备用容量。在风况一定的情况下,桨距角越大,机组留有的备用容量也就越大。由于叶片桨距最初处于减载操作状态,风机可以根据系统调频需求提供更多的有功功率,帮助恢复频率。

图2 同桨距角下转子转速的风力机机械功率曲线
在额定风速Vw=12 m/s和特定风机叶片角度下,从风中获取的机械功率仅与DFIG转子速度相关,如图2所示[7]。DFIGPAC设计用于输出不同桨距角的最大功率。不同桨距角下的最大功率随转子速度几乎呈线性变化。这条穿过图2中所有曲线的虚线是不同桨距角β和变化的转子速度ω的最大机械功率轨迹。对于Pmax随ω的变化,这种关系如式(5)所示。

类似地,Pm和β的关系为

式中,Pmax、Pm为风机最大功率和输入功率;K1、K2、K3和K4是线性拟合函数的系数。
图2显示了额定风速下的Pm曲线,对于其他风速可以获得类似的曲线。
由于本文的主要目的是测试风电场的频率调节能力,因此风机、变速箱、轴和发电机的传动系统简单地集中在一个等效的公共轴上。传动系的单质量模型为

式中,Htot为等效惯性时间常数;Tm为机械转矩;Te为电磁转矩;Ps为定子输出功率。
DFIG下垂特性被认为与同步电机相同。因此,当系统负荷增加时,风电场可以像同步电机一样参与负荷分配。电网频率恢复的PAC方案如图3所示。

图3 桨距角控制
风力风机的机械功率参考Pref由初始机械功率Pmo和补偿功率ΔP决定。补偿功率与风力发电场的下垂特性和电网频率变化Δf有关。如果系统频率下降,风电场预计产生的补偿功率由下列公式给定:

式中,fref是稳态系统频率;fgrid是测量的系统频率。
2.3 转子转速控制
转子转速控制(Rotor speed control)是使风机转子运行在次优转速下,以便在频率偏差的情况下提供一定量的功率储备。基于风机功率-转子速度曲线实现转子速度控制,利用输出功率和DFIG转子速度之间的关系,捕获在不同风速下的最大跟踪功率,发电机转子速度应随风速变化并保持最佳的叶尖速比。
风力发电场的转子速度控制的基础是风力机在减载模式下工作,当电网频率下降时可以将预留功率释放到电网中。风力机的输入机械功率与风速、叶片桨距角和转子速度有关。机械功率Pm、风速Vw和转子速度ω的关系如图4所示。为了储备10%备用容量,对于Vw=12 m/s的额定风速,风力机应在最大功率点C(Pmax=1.0 pu)下减载运行,同时存在两个平衡点A和B(Pm=0.9 pu),在不同的风速下,总是可以找到两个在90%的Pmax减载工作点。连接所有减载的操作点,可以获得左和右减载参考曲线。
图4中左、右减载功率参考曲线可以应用于具有可变风速的风电场频率调节。当处于C点时,风机输出最大功率,对应着最大功率点处的转速。如果此时控制风机转速超过C点转速,则风机的输出功率减小,保留了一部分备用容量。如果需要增加风机的输出功率,控制风机转速下降至图中的D点,此时,机械功率和电磁功率再次达到了平衡,从而实现了有功控制。对于恒定风速和风电场初始输出功率为P0时,图4所示的A是不稳定点,而B是稳定点。因为在电网频率下降时,风电场需要提供更多的有功功率ΔP。在点A处,电磁转矩Pe=Po+ΔP将大于机械功率Pm,风力机上的不平衡转矩将导致转子减速。因此,风力机将无法提取足够的机械功率。转子减速和较小的机械功率提取的过程将一直持续到风力机停滞。另一方面,如果电网频率上升,风电场会减少输出的有功功率,随后,机械功率Pm将大于电磁转矩Pe,不平衡扭矩将导致转子加速并提取更多的机械功率ΔP。这个过程将一直持续到在曲线C-B上找到一个新的平衡点。
转子速度与式(7)给出的机械扭矩和电磁扭矩有关。随着电网频率的变化,由于干扰,ωs不能简单地假设在1 pu不变。为了方便,定子侧功率Ps和电网频率ωs用电力Pe和转子速度ω表示。转矩方程描述为

风力发电场的转子转速控制流程如图5所示。风电P0是初始风电场输出功率,在电网频率恢复期间保持恒定。预期在频率下降期间,利用其下垂特性输出额外的有功功率。

图5 转子转速控制
3 实验及结果分析
本文所提出的控制方案在图6所示的4总线系统上进行测试。在总线1上为公共电网。在总线2上的负载变化导致电网频率的变化。具有相关DFIG和转换器的风力机位于总线4上。在初始基频角β0=1.6°时,保留了10%的功率用于频率调节。

图6 测试系统
随着负荷的变化,比较了PAC及惯性控制。在T=1.2 s时,负载从5.9 MW增加到6.5 MW,需要风力发电场提供额外的功率来维持电网负载平衡和恢复频率。在没有频率控制环节的情况下,风力发电场的输出功率保持不变,同步发电机提高了负荷,电网频率如图7所示。通过惯性控制,风电场旋转质量的动能迅速释放到电网,以确保电网频率不会突降。惯性控制和PAC控制将电网最小频率从49.81 Hz分别提高到49.86 Hz和49.84 Hz;同样也可以清楚地看出,通过惯性控制,风力发电场不能长时间稳定地输出额外功率。对于桨距角控制,虽然由于机械响应较慢而无法快速增加有功输出,但能够稳定地提供有功输出,提高频率调节能力。图8显示了对于相同的负载增加,具有转子速度控制的风力发电场频率调整的能力。在图7和图8中,RSC可以提供比惯性控制更多的有功功率支持来改善最小电网频率。

图7 响应负载增加惯性和PAC控制系统频率变化

图8 响应负载增加转子转速控制系统频率变化
4 结论
本文研究并比较了惯性、桨距角和转子转速3种类型的控制方法。
惯性控制可以极大地帮助管理频率偏移,但是转子不能长时间处于转速上升或下降阶段,仅能在短时间内表现良好,并且变速风机转子速度存在极值约束,不能作为长期调频使用。
RSC能够通过以次优的转子速度减载运行,提供备用电力。通过调节转子速度,可以在调频期间将额外的功率提供给电网。RSC响应迅速,它能够比PAC更好地抑制频率偏差开始时的频率下降或上升。还能够在很长一段时间内提供频率支持。RSC的缺点是存在控制盲区,由于风力机本身对转子转速的限制,只能工作在特定的风速区间。
桨距角控制能够使风力机功率转速曲线整体下移减载运行,留有备用功率。桨距角控制的调节能力较强,调节范围较大,可以实现全风速下的功率控制。但由于其执行机构为机械部件,风电场不能快速地输出备用功率来抑制电网频率的初始下降,最低点频率改善并不明显。
在分析和仿真结果的基础上,可以得出惯性控制和RSC都能快速响应电网频率降低改善最小电网频率,帮助恢复电网频率的最优点。惯控制性响应迅速但对稳态偏移无支撑;桨距角控制响应慢,但能够长期有功支撑,两种控制方式存在互补性,因此可以将不同的调频方式组合起来,更好的帮助系统频率的支撑。
猜你喜欢
电力科学与工程(2022年9期)2022-10-10 03:20:36
电力建设(2022年7期)2022-07-04 02:50:50
能源工程(2021年5期)2021-11-20 05:50:42
东方汽轮机(2020年3期)2020-11-04 11:07:34
测控技术(2018年5期)2018-12-09 09:04:38
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
电机与控制应用(2015年3期)2015-03-01 03:49:52
振动工程学报(2015年1期)2015-03-01 01:15:46
太阳能(2015年6期)2015-02-28 17:09:35