景洪水力式升船机大小门充间隙水运行流程设计
2019-07-26 06:21王虎军何庆周
陕西水利 2019年6期
王虎军,刘 锦,王 洋,何庆周
(西安航天自动化股份有限公司,陕西 西安 710065)
0 引言
景洪水力式升船机是一种新型式的升船机,它控制承船厢的升降是以水作为动力,不是传统的采用电机拖动的电力卷扬式,在国内外属于应用首例。它的工作原理是,设置的16个平衡重浮筒分别布置于16个充水竖井中。通过控制上游阀室的3个充水主辅阀和下游阀室的3个泄水主辅阀使竖井水位产生上升和下降,实现浮筒在竖井中运行,平衡重浮筒的上下运行再驱动承船厢的上下运行。当承船厢侧重量大于浮筒平衡重侧重量时,使承船厢下行,当承船厢侧重量小于浮筒平衡重侧重量时,使承船厢上行。
由于上下游充泄水阀门关闭不严产生漏水或承船厢的厢体漏水,这两种事故工况不会破坏升船机的平衡系统,所以水力式升船机具备更高的安全性[1]。
1 主要控制和监控设备组成
景洪水力式升船机控制系统设备主要由承船厢子站设备、驱动子站设备、上闸首子站设备、工业电视及广播以及直流供电等系统组成。
2 控制系统网络
景洪水力式升船机系统网络采用100 M双环光纤以太网结构,分为主控层和现地层。整个系统主要由上位监控系统、承船厢子站、驱动子站、上闸首子站和公用子站等组成。
主控层和现地层均接入双环网络,现地层子站再通过MB+网络实现和相应各控制单元的数据交换,所以各控制单元通过子站实现和主控层设备的间接数据交换[2]。
上位监控系统为主控层,其余的设备子站系统为现地层,各现地层子站通过安装在控制柜内的工业以太网交换机接入以太环网[3]。控制系统网络结构见图1。
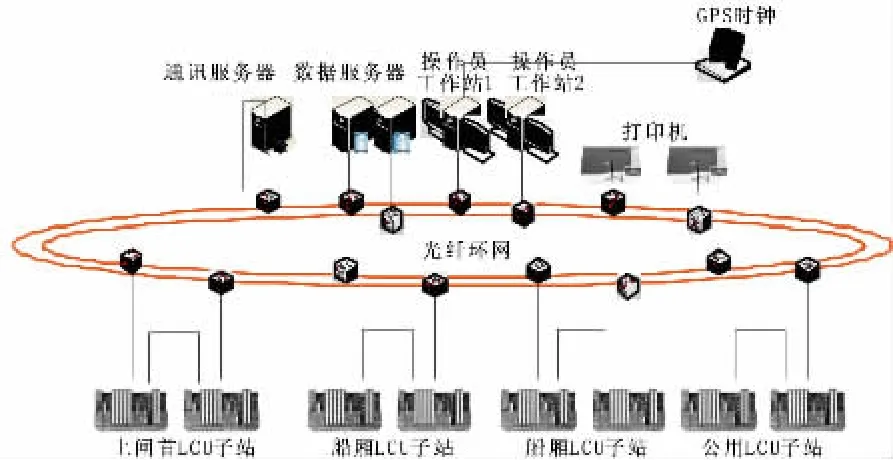
图1 控制系统网络结构图
主控层的上位监控系统能够实现数据采集和处理、升船机实时动态运行画面显示、工业电视监视和通航指挥监视、事件顺序记录、事故处理及恢复操作指导、实时数据库和历史数据库管理、记录及历史报表打印、系统设备运行维护管理、软件开发及培训的功能[4]。
现地层以双机热备的PLC系统为现地主控单元的核心设备,PLC设备与触摸屏以TCP/IP、UNI-TELWAY等协议进行通讯,画面通过棒图、指针、曲线等直观显示,可以完成参数设定、运行监视、数据查询等功能,其报警记录具有实时性和可追溯性的特点。
3 上闸首系统组成
上闸首子站设备及其控制单元的工作大门系统、工作小门系统、上游引水管进口事故门系统之间是通过工业MB+网络相连,是网络系统的现地层。
上闸首子站控制系统网络结构见图2。
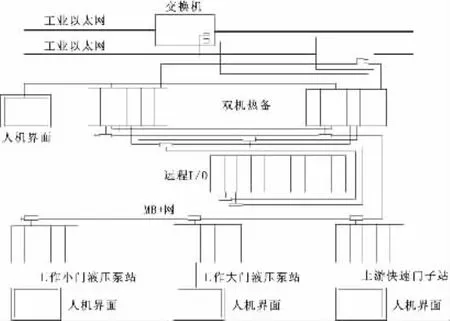
图2 上闸首子站控制系统网络结构图
3.1 工作大门系统
上闸首工作大门装置用于阻挡上游水位,使升船机能够安全、可靠地运行。工作大门最大设计行程为10.9 m,其中运行最大行程为10.7 m。
该系统通过工作大门液压泵站油泵电机、电磁溢流阀、提升电磁阀的控制来实现对工作大门装置提升,下落电磁阀控制实现对工作大门装置下落,通过控制纠偏阀可实现工作大门左右两个油缸装置的同步运行,还可以对大门开度及管道压力、流量的监控。
3.2 工作小门系统
上闸首工作小门装置位于工作大门上,是升船机上游对接后控制船只进出的引通道,工作小门最大设计行程为3.58 m,运行最大行程为3.5 m。
该系统通过工作小门液压泵站油泵电机、电磁溢流阀、提升电磁阀控制来实现对工作小门装置提升,下落电磁阀实现对工作小门装置下落控制。
与工作大门相同,通过控制纠偏阀可实现工作小门装置的同步运行。
4 承船厢系统组成
景洪水力式升船机承船厢子站由4个液压泵站和2个卧倒门液压泵站设备组成,2个卧倒门液压泵站设备分别控制上、下游的卧倒门系统,4套液压系统布置于承船厢4角,分别控制4角所辖范围内的现地控制设备,包括调平油缸伸缩、夹紧、顶紧装置、上游密封框装置、上、下游承船厢防撞梁装置的进退及液压系统油温、液位、油压、油泵电动机的运行参数等数据进行采集与处理。
承船厢控制系统还可以实现上游、下游船厢出厢和下游进闸进厢交通灯的控制,保证过往船只安全通航。它同时接收中控室控制命令和上位驱动子站硬接线信号并进行处理[5]。
承船厢子站控制系统网络结构见图3。
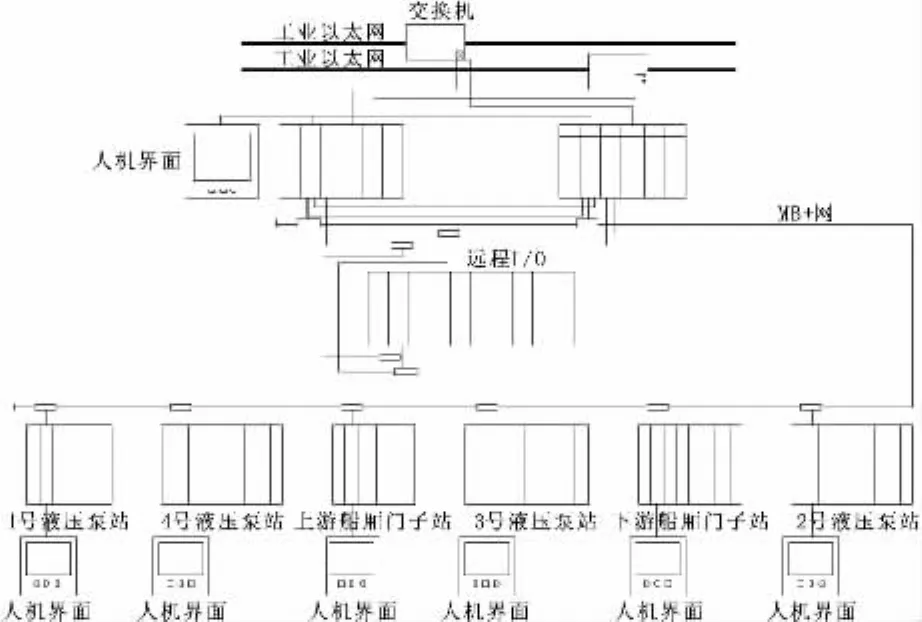
图3 承船厢子站控制系统网络结构图
5 运行控制流程
景洪水力式升船机电气系统的运行控制流程主要包括准备流程和生产中的运行流程。
准备流程属于上班前的的辅助流程,主要包括工作各子站准备流程、工作大门运行至挡水位自动控制流程、承船厢静态调平自动控制流程、承船厢厢内补水控制流程等。
生产运行流程属于承船厢生产中的正常运行流程,主要包括承船厢上行至上游对接位自动控制流程、上游对接自动控制流程、上游对接解除自动控制流程、承船厢下行至下游对接位自动控制流程、下游对接自动控制流程、下游对接解除自动控制流程等。
5.1 上、下游对接自动控制流程
承船厢上、下游对接自动控制流程是承船厢到达上、下游对接位后,分别与上、下游引航道进行对接,目的是使承船厢内水位分别与上、下游引航道水位进行连通,以便船舶能够顺利驶出承船厢,分别通过上、下游引航道进入上、下游库区。
承船厢上游对接自动控制流程顺序为:制动器上闸—顶紧机构推出—夹紧机构推出—密封框机构推出—工作小门下落充间隙水—上游卧倒门开启—上游防撞梁下落—船舶出厢进入上游引航道—流程结束。
承船厢上游对接自动控制流程见图4。

图4 承船厢上游对接自动控制流程图
承船厢下游对接自动控制流程较上游设备少,其顺序为:制动器上闸—下游卧倒门开启—下游防撞梁下落—船舶出厢进入下游引航道—流程结束。
5.2 上、下游对接解除控制流程
承船厢上下游对接解除自动控制流程是承船厢到达上、下游对接完成且厢内船舶全部驶出后的下一个工作流程的起点,它的目的是接收上下游船舶的承船厢与上下游航道脱离,以便承船厢能够进行升降运行。
承船厢上游对接解除自动控制流程顺序为:上游船舶全部通过上游引航道进厢—上游防撞梁上升—上游卧倒门关闭—工作小门上升—间隙水排水阀开启泄间隙水—密封框机构收回—顶紧机构收回—夹紧机构收回—制动器松闸—流程结束。
承船厢上游对接解除自动控制流程见图5。

图5 承船厢上游对接解除自动控制流程图
承船厢下游对接解除自动控制流程顺序为:下游船舶全部通过下游引航道进厢—下游防撞梁上升—下游卧倒门关闭—制动器松闸—流程结束。
5.3 工作大门的挡水位控制流程
工作大门运行至挡水位自动控制流程是上班前将工作大门由最高挡水位下降至当前挡水位,并能够随上游水位的升降变化自动调节高度。
上闸首工作大门启闭机的控制系统能根据上游水库水位变化自动调整大门位置,为了防止工作大门频繁升降运行,工作大门液压启闭机单次升降高度设置为500 mm,当水库水位上升或下降使得小门门槛以上水位小于2.5 m或大于3 m时,程序自动控制工作大门下降或提升500 mm,使套内的工作小门门槛以上始终保持2.5 m~3 m的正常通航水深。
工作大门运行至挡水位自动控制流程顺序为:工作大门锁定装置解锁—工作大门下落—落门到位--随水位调节高度—工作大门锁定装置锁定—流程结束。
工作大门运行至挡水位自动控制流程见图6。
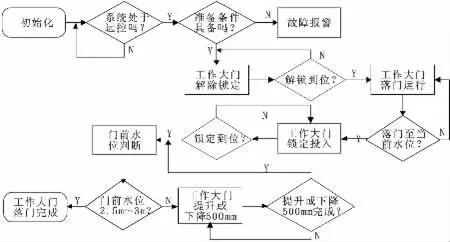
图6 工作大门运行至挡水位自动控制流程图
5.4 工作小门的下落充间隙水自动控制流程
上闸首工作小门下落充间隙水是在承船厢上游对接过程中,工作小门下落,使上游航道的水通过工作小门顶部快速充入密封框间隙中,平衡上游卧倒门两侧的压力,为下一步上游卧倒门的开启提供条件。
工作小门落门充间隙水自动控制流程为:工作小门下降至充水平压位—充间隙水平压—工作小门下降至全开位—流程结束。
工作小门的下落充间隙水自动控制流程见图7。
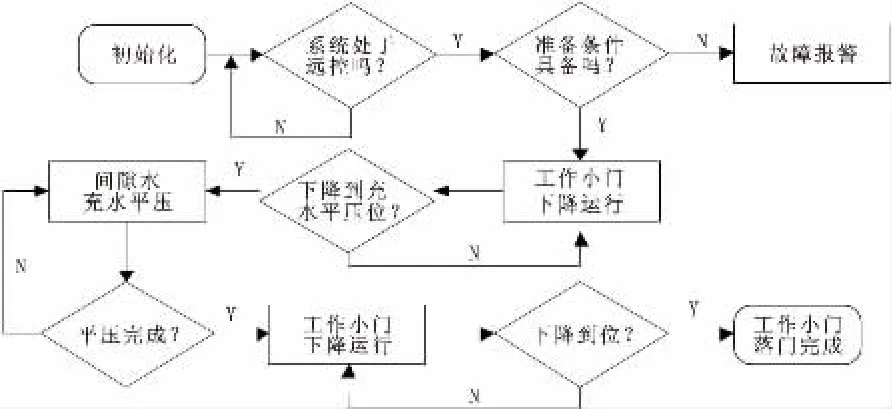
图7 工作小门的下落充间隙水自动控制流程图
6 结语
景洪升船机是中国原创的世界首台水力式升船机。在承船厢的上游对接过程中通过上闸首子站控制工作大门到上游挡水位,再控制工作小门下落,顶部过水方式实现密封框快速充间隙水,通过开启间隙水排水阀快速泄间隙水。经过实践运行证明,该控制流程逻辑关系正确、设备动作定位准确,达到了预期效果。它较以往升船机的控制采用充泄水管道的方式缩短了密封框的充泄间隙水时间,提高了升船机的运行效率,为以后升船机的设计提供了一种新的借鉴方式。
猜你喜欢
纺织服装周刊(2022年15期)2022-05-12
星星·散文诗(2020年34期)2020-12-29
石油库与加油站(2020年2期)2020-11-23
星星·诗歌原创(2020年12期)2020-04-01
科学与财富(2017年16期)2017-06-13
中国三峡(2017年1期)2017-06-09
中国三峡(2017年1期)2017-06-09
中国三峡(2017年1期)2017-06-09
科学家(2016年4期)2016-07-25
中国信息化·学术版(2013年5期)2013-10-09