无人机视觉的桥梁底面裂缝检测方法
2019-07-23 07:06:24贺志勇
筑路机械与施工机械化 2019年6期
贺志勇,王 鹏
(华南理工大学 土木与交通学院,广东 广州 510641)
0 引 言
为确保桥梁运营安全,必须及时进行检测评估。对在役桥梁进行快速、科学、准确检测,建立合适、便捷的检测评估方法已成为当务之急。目前桥梁检测以人工现场调查法为主。人工现场调查法存在工作量大、速度慢、效率低、漏检率高、费用昂贵、占用桥面车道、易造成交通拥堵等缺点。
为加快检测速度,提高效率,实现桥梁检测自动化,国内外学者进行了大量研究[1-4],如南京理工大学、哈尔滨工业大学、日本大阪市立大学对爬壁机器人进行了深入研究;广东工业大学提出一种智能视频桥梁检测车,通过液压伸缩臂装置将图像采集装置安置在桥梁底面,采集桥梁病害视频;Je-Keun Oh等提出并设计了一种桥梁自动检测系统,该系统由桥梁检测车、轨道和图像采集系统三部分组成;张登峰等设计了一种桥梁检测车,通过控制器控制云台的转动,拍摄桥梁底面各个位置的图像,依靠图像处理技术进行处理识别。
在无人机桥梁检测研究方面,王小莉提出了四旋翼飞行器的几种关键技术,包括数学建模、硬件设计、PN码定位法、姿态估计法等[5];陶晓力等采用无人机配备高倍变焦摄像头的方法采集桥梁裂缝图像,试验验证该方法具有较好的效果[6]。
综上所述,无人机可以作为先进的检测工具应用在桥梁的裂缝检测中。本文规划无人机的检测飞行路线,重点采集桥梁底面的裂缝,运用数字图像处理技术进行裂缝分类,以验证利用无人机进行桥梁检测的可行性。
1 无人机在桥梁底面检测中的应用
1.1 无人机简介
为了采集桥梁底面的正摄图像,选择大疆公司的M210RTK无人机。M210RTK无人机配备性能强劲的Flight Autonomy系统,帮助飞行器避障,机顶的红外传感器更能提供上方避障保护。配合RTK(Real-time kinematic)载波相位分差技术,无人机的悬停精度可以达到±0.1m,云台安置在无人机上部,可控制镜头与桥梁底面保持垂直。相机的镜头采用定焦镜头,焦距为50mm,可拍摄2 400万像素的图片。无人机平台顶部安装有激光测距传感器,在定点拍照时可以实时记录相机到桥梁底面的距离H。无人机进行桥梁检测对于定位精度要求较高,飞行前应实测当地风速,风速小于2m·s-1时方可飞行,天气应晴朗、少云。
1.2 相机的标定
为了提高拍摄的精度,获得较好的成像质量,无人机应尽可能地在距离桥梁底面近的位置拍摄,但同时也要保证一张照片所拍摄的实际面积足够大,故需要合理确定拍摄距离h和焦距f。
钢筋混凝土梁不同部位的允许最大裂缝宽度在0.25~0.5mm 不等,而定检中要求观测到0.02 mm以上的裂缝。桥梁结构中的真实裂缝不是规则的直线或曲线裂缝,因此宽度至少需要2个像素显示。单张图像表示面积为60mm×40mm,可以采用如下步骤粗略测定镜头的拍摄距离。
(1)在一张白纸上,画2条相互垂直且等分的线段A、B,A长度为60mm,B长度为40mm,将白纸固定在平整的墙壁上。
(2)将相机放置在三脚架上,调整三脚架的位置、高度,使相机垂直于墙壁。
(3)移动三脚架,使白纸上的2条线段在长宽2个方向正好出现在取景器。
(4)反复用钢尺测量镜头到白纸之间的距离,求得平均值为500mm[7]。
可以确定,焦距f固定时,当拍摄距离h=500 mm时,拍摄图片的实际面积为60mm×40mm,单个像素占0.01mm2。由于无人机悬停精度误差为±0.1m,所以拍摄距离h不是定值,当拍摄距离h变化,而焦距f固定时,由凸透镜成像原理可知

式中:P1为拍摄距离为h1时像素的大小;P2为拍摄距离为h2时像素的大小。
每次定位拍摄时高度信息记录在照片中,确定了拍摄距离h后,可以求出像素的大小P,从而求得裂缝的面积。
1.3 无人机飞行航迹的规划
由于裂缝宽度较窄,为了能够识别裂缝病害,需要近距离拍摄。单张图像所覆盖的面积较小,检测一跨桥梁就需要几千张图片,难以确定裂缝在桥梁的具体位置,也就无法为养护部门提供准确的信息。为此采用有序拍摄编号法,对不同的构件进行分类编号。在进行桥梁底面检测前将桥梁底面按照单张所拍面积大小分块,确定各子块的中心坐标,将坐标转换成世界坐标系,输入到无人机地面站,使无人机按照图1顺序飞行,在子块中心悬停拍摄。如编号为511500的照片表示第5跨第1行第1列位置,距桥底距离为500mm。

图1 无人机飞行航迹
2 图像预处理
2.1 桥梁底面裂缝特征
桥梁底面裂缝的特征主要有以下2点。
(1)一幅裂缝图像包括3个部分,大部分为背景,小部分为裂缝、噪声。噪声部分的灰度值往往和裂缝部分灰度值有一部分重叠。
(2)与整个桥梁底面相比,裂缝所占的面积只是很小的一部分,即裂缝的像素数远小于背景部分的像素数。
2.2 图像灰度化及灰度校正
由于颜色对于桥梁裂缝图像的处理不产生影响,而且灰度图像在计算量和计算速度方面占有优势,故先将彩色图像统一转化为灰度图像。假设用f(i,j)表示一幅灰度图像,采用 MATLAB批量处理图片。转换函数rgb2gray实现图像灰度化的原理为:根据重要性及其他指标,将RGB图像中的R、G、B三个分量以不同的权值加权平均[8],即

之后,用一个对数函数对图像的每一个像素灰度做对数变换,用于压缩输入图像中高灰度区的对比度,从而扩展低灰度值。为了避免对求对数,对f求对数改为对(f+1)求对数,再以尺度比例常数C增加其动态调整范围[9]。

运用MATLAB对裂缝图像进行变换,结果如图2、3所示。从效果可以看出,对数变换能够扩展低值灰度,压缩高值灰度,使低值灰度的图像细节更容易看清。

图2 竖向裂缝

图3 对数变换后的图像
2.3 中值滤波去噪
根据已有研究成果,方形的滤波窗口对于有较长的轮廓线物体的图像有较好的滤波效果。研究对象是裂缝,它具有较长的轮廓线,所以采用3×3、5×5、7×7不同的滤波模板,对加了椒盐噪声的灰度图像进行滤波处理,原图和滤波后图像如图4~7所示。
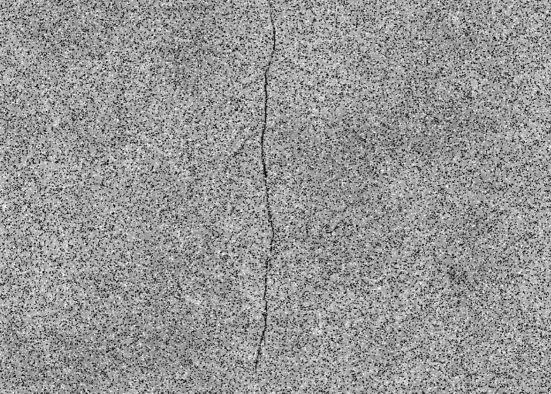
图4 添加椒盐噪声

图5 3×3模板滤波

图6 5×5模板滤波
采用3种中值滤波器对图像分别进行了滤波处理,但噪声仍然存在。尝试先用3×3的滤波器对图像进行滤波,然后再利用5×5的滤波器对滤波后的图像进行二次滤波,观察滤波后图像效果,如图8所示。
2.4 基于八方向的Sobel算子的边缘检测

图7 7×7模板滤波
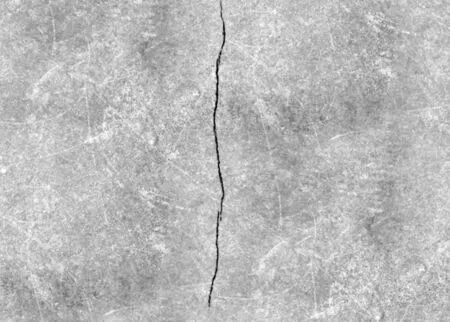
图8 3×3、5×5模板滤波
由于检测图像的裂缝特征在裂缝的各个方向都有,采用传统的Sobel算子会造成漏检,使部分边缘细节丢失。故依据裂缝图像的边缘特征,采用0°、45°、90°、135°、180°、225°、270°、315°八个方向的 Sobel算子进行检测,检测模板如图9所示。
该算法分别利用八方向模板与对应的图像数据进行卷积做近似计算。算法取8个缓存中灰度值较大的作为当前像素输出值,最大值所对应的模板方向就是该点的边缘方向。遍历图像后,所有8个方向的算子均卷积一次,取所有像素点卷积的最大值组成梯度幅值图像。任意点像素点的表达式为

利用MATLAB进行仿真后,得到传统Sobel算子和八方向改进Sobel算子的效果图,如图10、11所示。
2.5 噪声形态学去除
由于照片并非是在理想条件下获取的,桥梁底部会存在各种水渍、粉笔标记、水泥斑点等,虽然尽可能地完善了光照条件,选用了较好的飞行器材、高端的相机镜头,也采用合理的算法对图像进行增强处理、滤波去噪,但二值化后的图像仍然存在许多噪声。为了获得纯净的裂缝二值图像,选用合适大小的结构元素,以形态学闭运算的方法,对二值图像进行处理,去除细小孔洞。

图9 八方向模板
3 基于BP神经网络的桥梁裂缝分类
经过上述算法处理后,可以得到较为清晰的二值图像。虽然通过人眼观察,可以清楚无误地分别清楚图像中否含有裂缝,但是每座桥会产生大量的照片,为了节省人工劳作时间,更加准确地测量出病害的面积,对桥梁做出科学、快速、准确的评价,故对裂缝图像进行特征提取,进行特征向量的描述,并基于这些特征向量构造BP神经网络,利用该网络进行自动化的分类识别工作。

图10 Sobel算子
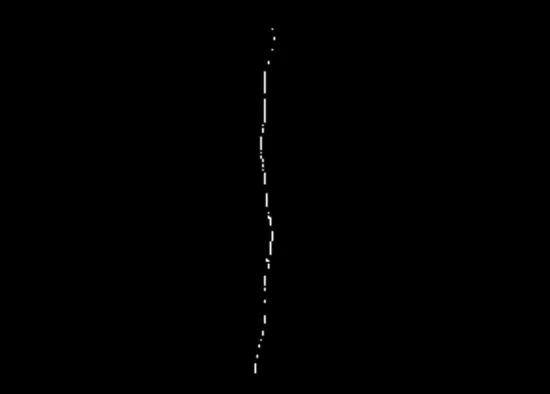
图11 八方向Sobel算子
3.1 裂缝特征向量的选择
假设存在一幅二值图像R(i,j),大小为M×N,其中背景部分是黑色像素,灰度值为0,目标部分是白色像素,灰度值为1。利用函数sum(R)进行计算,若sum(R)<U,则该照片不含裂缝;若sum(R)>U,则该照片中含有裂缝,U 为经统计得出的经验阈值。对二值图像R(i,j)分别在X轴、45°轴、Y轴、135°轴上进行投影,然后以投影轴为横轴,以与投影方向垂直的目标像素的灰度值之和为纵坐标绘图。
X轴的投影公式为

Y轴的投影公式为

45°轴的投影公式为

135°轴的投影公式为

其中的投影原理是:在X轴上的投影是在y方向上的所有像素为1的和;在Y轴上的投影是在x方向上的所有像素为1的和;在45°轴上的投影是首先将大小为M×N的二值图像R(i,j)逆时针旋转45°,变为大小为P×Q、在135°方向上的所有像素为1的和;在135°轴上的投影是首先将二值图像顺时针旋转45°,在45°方向上的所有像素为1的和。5种典型裂缝图片经过上述处理后分别向X轴、45°轴、Y 轴、135°轴投影,如图12~16所示。

图12 横向裂缝各轴投影

图13 纵向裂缝各轴投影
经分析可得出以下结论。
(1)横向裂缝向X轴的投影相对平缓,峰值较小,波动范围较分散;向Y轴的投影出现一个明显的波峰,波动范围较为集中;向45°、135°轴的投影相对平缓,峰值较小,波动范围较分散。

图14 45°裂缝各轴投影

图15 135°方向裂缝各轴投影
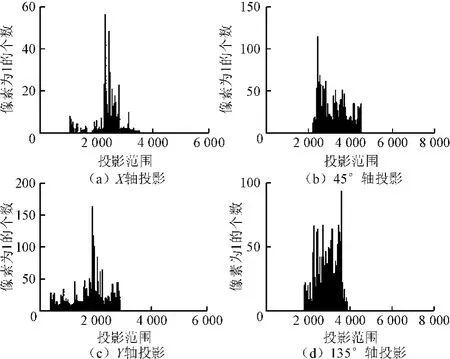
图16 网状裂缝各轴投影
(2)纵向裂缝向Y轴的投影相对平缓,峰值较小,波动范围较分散;向X轴的投影出现一个明显的波峰,波动范围较集中;向45°、135°轴的投影相对平缓,峰值较小,波动范围较分散。
(3)45°斜向裂缝向45°轴的投影相对平缓,峰值较小,波动范围较分散;向135°轴的投影出现一个明显的波峰,波动范围较为集中;向X、Y轴的投影相对平缓,峰值较小,波动范围较分散。
(4)135°斜向裂缝向135°轴的投影相对平缓,峰值较小,波动范围较分散;向45°轴的投影出现一个明显的波峰,波动范围较为集中;向X、Y轴的投影相对平缓,峰值较小,波动范围较分散。
综上可知,网状裂缝向各个轴的投影均比较平缓,峰值较小,波动范围分散。
3.2 建立BP神经网络
本文选择4层BP神经网络进行裂缝的分类,包含两个隐含层。神经网络结构见图17。
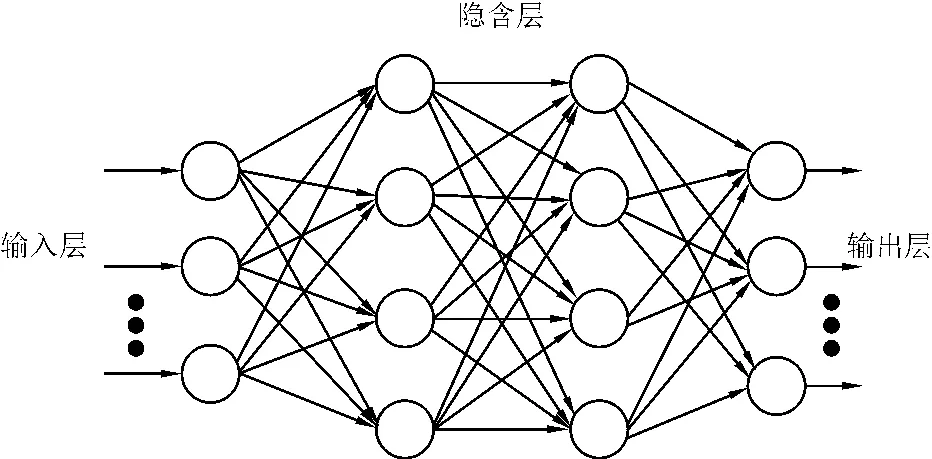
图17 神经网络结构
输入向量:P={D1,D2,D3,D4,G1,G2,G3,G4,S,NUM}。
D1、D2、D3、D4分别表示向 X 轴、45°轴、Y 轴、135°轴投影后纵坐标的差值;G1、G2、G3、G4分别表示向 X 轴、45°轴、Y 轴、135°轴投影后的投影范围;S是图片中裂缝的像素为1的点的个数,即像素的面积;NUM是连通域的个数。
经过多次试验,选择隐含层为2,隐含神经元个数为 60。输出向量 T= {00001,00010,00100,01000,10000}代表5种情况,即横向裂缝表示为00001,45°方向裂缝表示为00010,纵向裂缝表示为00100,135°方向裂缝表示为01000,网状裂缝表示为10000。经过多次试验,神经网络的学习率设置为0.1。输入层与隐含层的连接函数为TANSIG,隐含层与输出层的连接函数为PURELIN。学习函数为TRAINLM。
使用MATLAB中的神经网络工具箱,对350幅样本图像进行训练,其中各个状态的裂缝均匀分布,打乱顺序,随机选择前300张图像进行训练,分别经过3次、4次、5次、8次迭代后停止,得到训练好的神经网络net1、net2、net3、net4,如图18~21所示。然后,将剩余的50幅图像进行仿真分类,与真实的裂缝情况进行比较,分类的正确率分别为98%、92%、96%、94%,平均正确率在90%以上。误判率为2%、8%、4%、6%,即分别有1幅、4幅、2幅、3幅被误判为其他裂缝。

图18 net1训练结果

图19 net2训练结果

图20 net3训练结果

图21 net4训练结果
4 结 语
针对不断发展的桥梁检测事业,本文提出将无人机应用于实际桥梁检测,通过规划无人机飞行路线,采集大量桥梁病害图片,结合数字图像处理技术、BP神经网络技术对裂缝图像进行分类,裂缝分类识别正确率均在90%以上。研究结果表明,基于无人机视觉的桥梁检测方案具有自动化程度高、速度快及准确率高的优点,为桥梁检测提供了新的途径。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
数学物理学报(2021年1期)2021-03-29 03:14:42
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34
学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11
学生天地(2019年15期)2019-05-05 06:28:28
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18