平均风作用对天马望远镜面形精度和指向精度的影响
2019-07-17 02:28:04王宇飞钱宏亮
天文学进展 2019年2期
付 丽,王宇飞,,钱宏亮
(1.中国科学院 上海天文台,上海200030;2.哈尔滨工业大学(威海)土木工程系,威海264209)
1 引 言
天马望远镜(简称TM65m)位于上海市西南郊的佘山,是轮轨式的方位/俯仰天线。天线主反射抛物面口径为65 m,高约70 m。天线在轮轨以上可转动部分的总重量约2 500 t,属大跨空间钢结构[1]。由于天线具有巨大的主反射面,并且其方位角和俯仰角也会发生变化,因此风荷载对天线主反射面面形精度和指向精度的影响不容忽视。
自然界的风通常分为平均风和脉动风,对天线结构分别产生平均风荷载的静力作用和脉动风荷载的动力作用。本文主要对平均风的静力作用对TM65m 的面形精度和指向精度的影响展开讨论。
全自动射电望远镜结构体形复杂,且其迎风姿态多种多样,因此其风荷载特性也十分复杂。早年间,学者们多通过风洞试验来获取大型天线结构的风荷载特性分布数据[2],但风洞试验耗费巨大,且可重复性较低。近年来,计算流体力学(computational fluid dynamics,CFD)方法逐渐发展并得到广泛的应用,许多学者开始采用CFD 方法对大型天线结构进行数值风洞模拟。刘岩等人[3]及王春圆[4]采用CFD 数值模拟与风洞试验相结合的方法对大型抛物面天线主反射面的风荷载特性进行了分析计算,给出了较准确的主反射面的分区平均风压系数,并对风荷载作用对主反射面面形精度的影响做了初步分析。赵彦[5]、李素兰[6]和虞梦月[7]则以天线指向精度为目标,分析了指向误差的来源,然后建立了天线轴系误差对指向精度影响的计算模型,并研究了部分工况下自重和风荷载作用对指向误差的影响;同时分析了利用倾斜仪测量轴系误差的理论方法,主要采用早年间风洞试验得出的平均风压系数来计算天线风荷载,且研究重点为系统控制和误差补偿。
Angeli 等人[8]对双子南座望远镜表面风压以及周围风速和风向做了大量数据实测工作,并据实测数据分析了其反射面的风压分布和频谱特征。Gawronski[9]对天线指向精度问题做了广泛的研究,提出了应用于指向误差计算的三种天线风荷载输入模型,并在34 m 和70 m 口径天线上做了计算和对比,指向误差结果相似;分析了指向误差的影响因素,并利用倾斜仪测量了天线指向误差,得到了较为理想的测量结果[10];其主要从伺服控制的角度对指向精度做了深入研究。
本文以TM65m 为研究对象,对当地风环境实测数据进行了分析,为风荷载的输入提供参考依据。通过建立天线结构有限元模型以及利用平均风荷载作用计算方法,对TM65m 的平均风响应进行了计算分析,并结合倾斜仪实测所得指向误差数据来验证仿真模型和计算方法的有效性。最后,选取更多的风荷载工况,模拟了TM65m 的平均风响应,总结出指向精度和面形精度的变化规律。
2 天线结构风荷载作用计算方法
天线主要由主反射面、副反射面及其撑腿、馈源、背架结构、俯仰机构(大齿轮)、方位座架等组成(见图1),其中主反射面为旋转抛物面,是平均风荷载的最主要作用部位。本文在天线结构有限元模拟中主要考虑主反射面的平均风荷载。
2.1 TM65m 风环境统计分析
为了解TM65m 周围的风特性,以获得较为准确的风荷载输入,我们在10 m 高度处设置了风速风向记录仪,实时测量并记录风速风向数据。采集频率为0.1 Hz。本文利用2016年全年风速风向记录仪所记录的数据,计算了10 min 时距的平均风速和平均风向,其中,平均风速直接采用算术平均法计算,平均风向采用矢量平均法[11]计算。矢量平均法充分考虑了风速和风向对平均风向的综合影响,避免了风速为0 时,风向记录数据对平均风向造成的误差。矢量平均法计算形式如下:

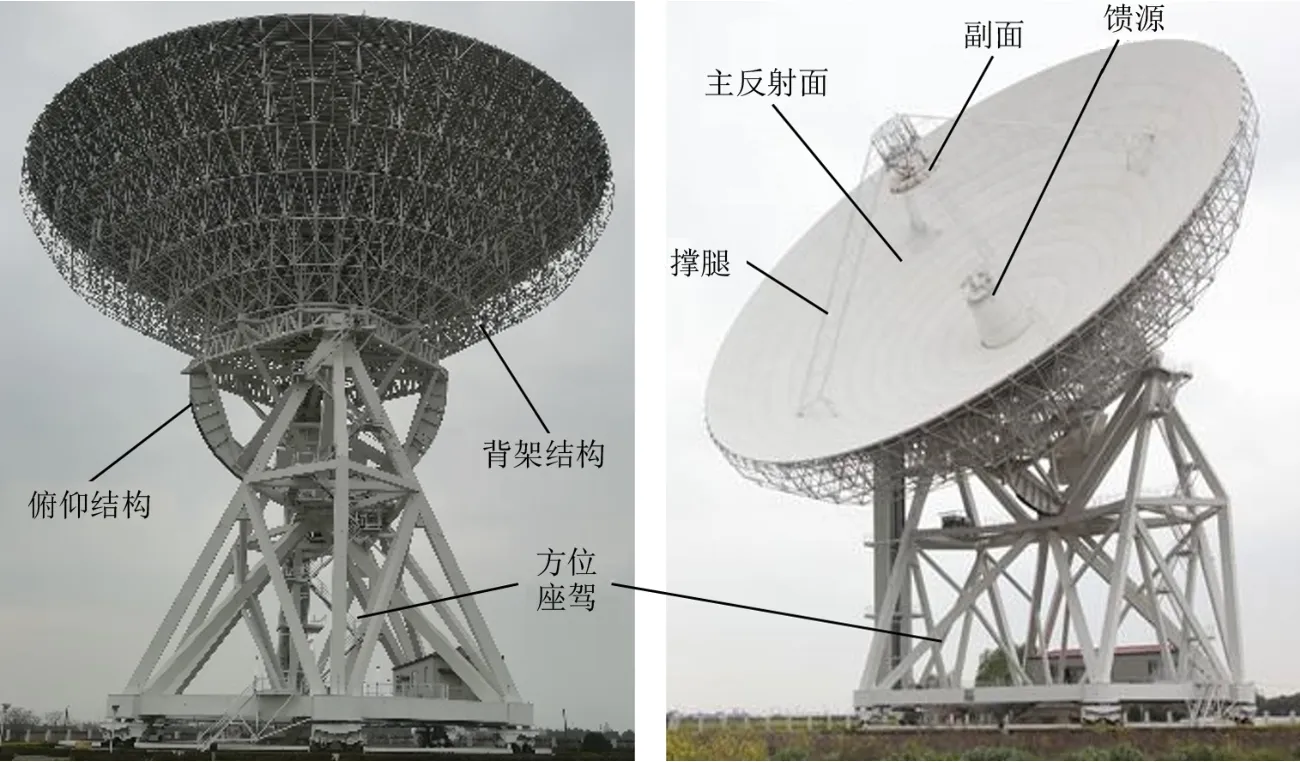
图1 TM65m 的实物图
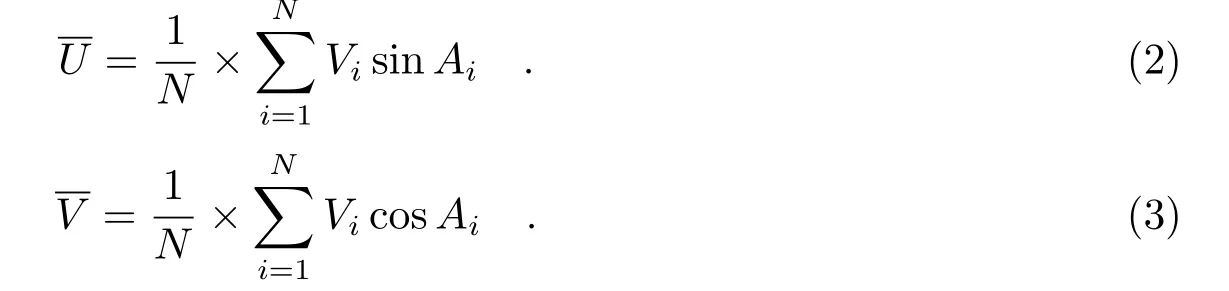
其中,Au为矢量平均法算得的平均风向,Ai为第i个风向样本的风向方位角度,Vi为第i个风向样本对应的风速,N为样本数,为风速矢量在东西方向的平均分量,V为南北方向的平均分量。将所得平均风速风向进行统计分析,我们获得全年及各月份平均风速分布和平均风向频率玫瑰图等特性。风向频率玫瑰图采用16 方位罗盘图表示,风向角度和16 方位的对应关系见表1。绘制风向频率玫瑰图时,各方位对应频率可由下式算得:

式中,gn为n方位上的风向频率;fn表示统计时段内,观测到第n方位风的次数;C为0风速次数。
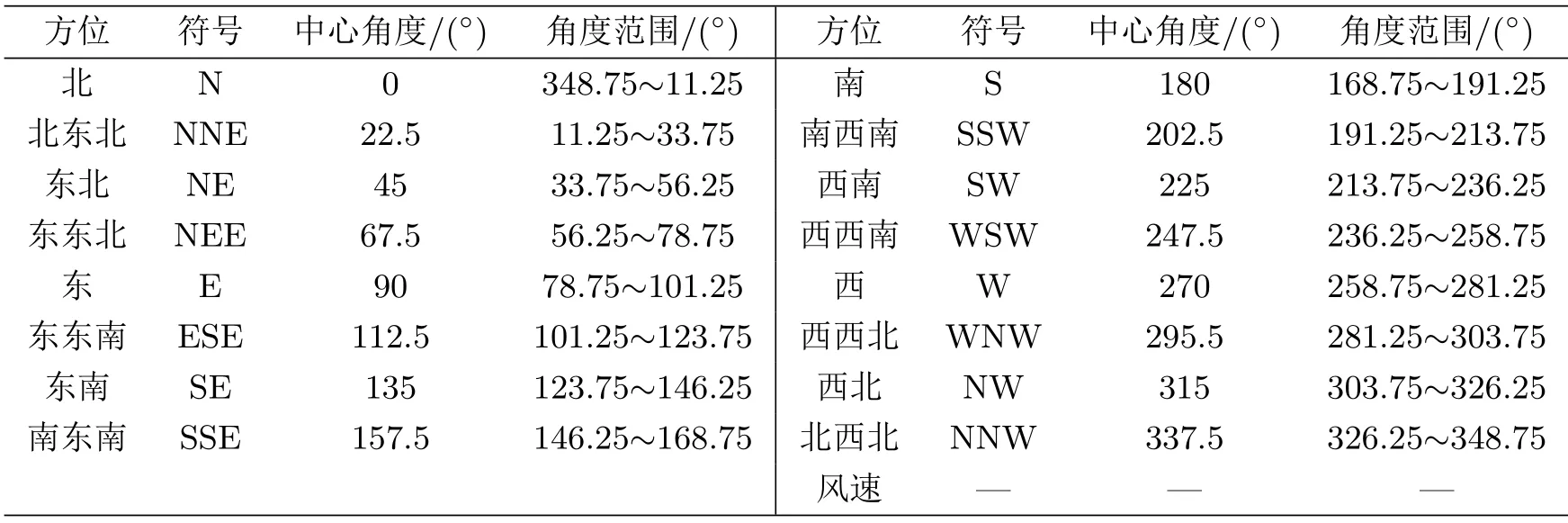
表1 风向角度与方位对应关系
2.2 TM65m ANSYS 有限元模型
图2给出TM65m 结构的全尺寸有限元模型。模型采用无面板形式,反射面面板以集中质量形式置于反射面节点处;馈源、平台、护栏、机房等不参与结构受力部分亦以集中质量的形式加在结构相应节点上。该ANSYS 有限元模型可通过APDL 命令流来改变天线俯仰角。模型各部分单元类型见表2,材料属性见表3。
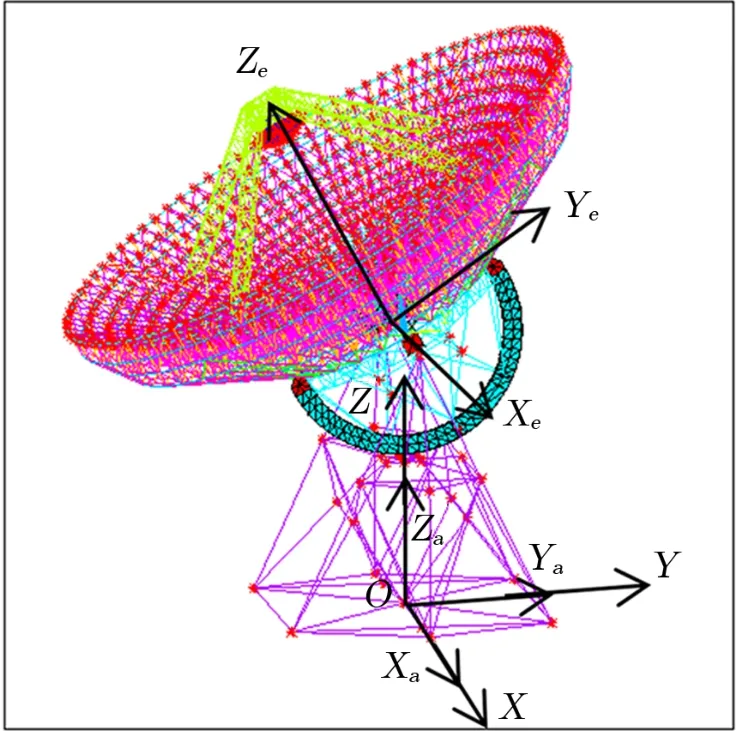
图2 TM65m 结构有限元整体模型和局部坐标系标定示意图
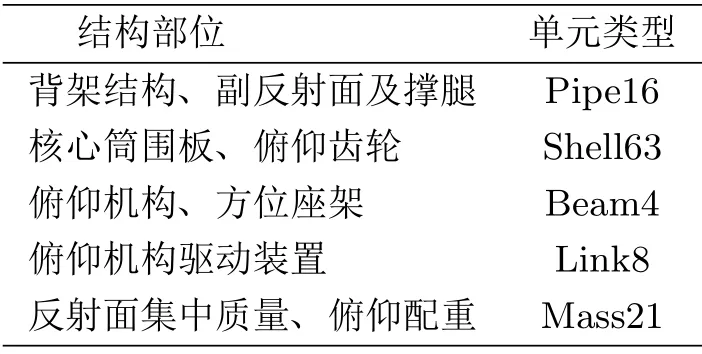
表2 TM65m 模型各部分单元类型
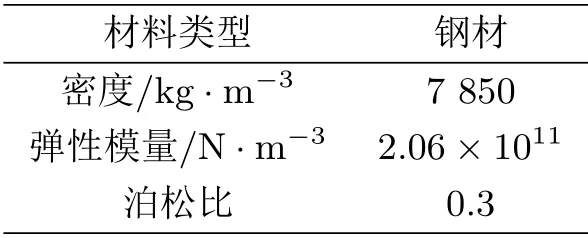
表3 TM65m 模型材料属性
2.3 风荷载输入模型
在研究风对天线指向的影响时,Gawonski[9]把天线风荷载输入模型主要分为三种:(1)风力以风压形式直接作用在天线主反射面上,引起结构变形;(2)将风力等效为作用在天线驱动轴上的力矩;(3)将风的扰动等效为对驱动输入效率的影响。本文以主反射面为风荷载的主要作用对象,采用第一种模型,并将反射面风压转化为反射面节点上的集中荷载,作用于TM65m 结构有限元模型,进行结构的风响应计算。平均风压采用《建筑结构荷载规范》中给出的方法来计算:

其中,βz为风振系数,µs为风荷载体形系数,µz为风压高度变化系数,w0为基本风压。w0可表示为:

其中,ρ为空气密度,vb为标准参考高度(中国规范为10 m)处平均风速。风振系数βz为考虑风荷载的随机性和动力特性的放大系数,本文主要研究平均风产生的静力作用,因此本文中取βz=1;风荷载体形系数采用文献[3] 中给出的分区平均风荷载体形系数值。风压高度变化系数采用如下指数公式计算(TM65m 所在地貌按B 类计算)。

其中,z为离地高度,α为地面粗糙度指数,2012年版《建筑结构荷载规范》中,B 类地貌取α=0.15。在进行有限元模型的风荷载施加时,我们将风压等效为反射面各节点的集中风荷载,按节点负荷面积计算集中风荷载的大小,并将其沿坐标轴三向分解,完成节点荷载赋值。上述计算方法均通过ANSYS 的APDL 语言编程实现。
3 天线面形精度分析方法
天线主反射面面形精度是指反射面在外荷载作用下保持抛物面几何形状的能力,而并非偏离原设计抛物面的程度。实际上,每个变形后的反射面都对应一个最佳吻合抛物面,使得变形后反射面各点相对于它的半光程差的均方根值最小。将该最小均方根值作为面形精度的衡量指标,并记为RMS。最佳吻合抛物面与原设计抛物面和变形后反射面间位置关系如图3所示。
通过几何推导,并略去二阶量,可得最佳吻合抛物面在原设计抛物面坐标系中的方程式。该方程中包含6 个相对于原设计抛物面的参数,分别为不同坐标系下抛物面顶点的位移uA,vA,wA,焦轴绕x,y轴的转角ϕx,ϕy和焦距的变化量h。反射面节点半光程差可由下式推得:

图3 设计抛物面与最佳吻合抛物面和变形后反射面位置关系示意图
式中,∆D为半光程差,∆为节点法向偏差,r为节点与焦轴间垂直距离,f为原设计抛物面焦距。略去二阶微量的节点法向偏差的表达式如下:

式中,x0,y0,z0为原设计抛物面节点坐标,u,v,w为不同坐标系所对应的节点位移,f为原设计抛物面焦距。通过式(8),可求得反射面面形精度RMS:

其中,N为计算时所用反射面节点的个数。将∆2D对前述6 个参数分别求偏导数,并令其均等于0,并解相应方程组,即可得各参数的值。上述各物理量的详细推导及求解过程可参考文献[12]。
4 天线指向精度分析方法
在实际应用中,指向精度指天线在一定方位角和俯仰角下,考虑各种误差及变形影响时,天线馈源的机械结构的实际指向与目标方位间的角度偏差,通常以角秒为单位,可分解为方位指向误差和俯仰指向误差,以便于进行软件校正。
4.1 指向误差的影响因素及构成
制约天线指向精度的因素很多,整体可归纳为结构因素和控制因素。结构因素主要是指构件的制造、安装误差以及由外荷载(如自重和风)作用引起的结构变形所导致的指向误差;控制因素主要指传动机构的滞后等引起的指向误差。本文主要研究结构因素中的风荷载作用对指向精度的影响。从天线结构本身进行分析,指向误差主要由天线结构各轴系间的相对角度误差组成,包括方位轴偏移误差、俯仰轴倾斜误差、反射体变形引起的电轴偏移误差等,如图4所示。这三个部分轴系误差相互耦合及叠加,产生天线电轴指向目标的综合误差。
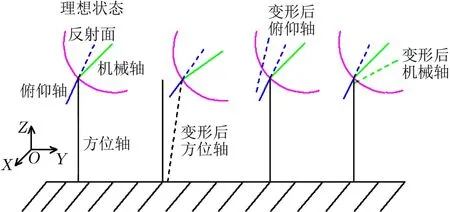
图4 天线各轴系误差示意图
4.2 指向误差计算方法
本文通过计算理想状态下与风荷载作用下天线机械轴的方向向量间的夹角来分析天线的指向误差。虞梦月[6]通过建立大地坐标系和局部坐标系,并采用坐标转换等方法推导了各轴系误差单独存在时对天线方位和俯仰误差的影响关系式,以及各轴系误差同时存在时对应的最终方位和俯仰指向误差表达式,并通过有限元计算验证了其正确性,为实测中倾斜仪的布置提供了依据。适当简化后的轴系误差对天线指向误差影响模型如下:

其中,f1,f2的表达式如下:

其中,α,β分别表示方位指向误差和俯仰指向误差;ϕax,ϕay分别表示方位轴绕Xa,Ya轴的误差;φey,φez分别表示俯仰轴绕Ye,Ze轴的误差;ψxe,ψye分别表示仅反射体变形引起的机械轴绕Xe,Ye轴的误差;A,E分别表示方位角和俯仰角。天线坐标系标定示意图见图2。需要说明一点的是,虞梦月[6]在推导变形后机械轴的方向向量时,仅采用机械轴上两点的位移来确定,而事实上,变形后的主反射面已经不再是完美的旋转抛物面,其原机械轴上两点变形后的坐标已不能再准确描述变形后机械轴的方向,因此,其结果存在较大的误差。本文对该问题进行修正,采用最佳吻合抛物面的焦轴方向作为变形后的机械轴方向,以此来计算指向误差。最佳吻合抛物面焦轴方向的计算方法参见第3 章。由几何关系可推出方位和俯仰指向误差计算式:

4.3 倾斜仪测量及数据分析方法
倾斜仪可以测量其所在平面的倾斜角度,本文所用倾斜仪测量系统由徕卡Nivel 220 电子倾斜仪、控制计算机、数据采集和滤波软件等组成。徕卡Nivel 220 精密双轴电子倾斜仪如图5a)所示,Lx和Ly表示相互垂直的两个传感器的方向,其测角分辨率为0.2″,零点稳定度小于0.97(″)/(℃),采样时间最小为300 ms。如图5b)所示,2 台倾斜仪安装在俯仰轴承座的试验工装上,倾斜仪Lx轴垂直于俯仰轴,当天线方位角为0◦时,北为Lx轴正向,西为Ly轴正向。倾斜仪的Lx和Ly数据、对应的方位角和俯仰角及旋转速度等数据会自动记录在控制计算机文档里。倾斜仪的Lx方向输出数据即为方位轴绕俯仰轴的转角误差(方位轴沿Lx方向倾斜量)。对实测倾斜角数据进行滤波平滑处理,得到垂直于俯仰方向的倾斜量XT(测量值),对应引起指向误差的内因——方位轴倾斜量。本文主要采用Lx方向的输出数据来验证计算模型和方法的准确性。
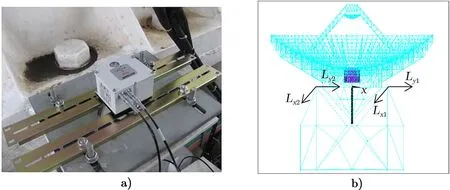
图5 倾斜仪及其安装位置示意图
5 结 果
利用上述有限元模拟及数据测量和分析方法,我们首先给出TM65m 的风环境特性结果,然后将倾斜仪测量结果与同步数值模拟结果进行对比,验证有限元模型和计算方法的有效性,最后在不同俯仰角和风向角情况下,进一步分析平均风荷载作用对天线面形精度和指向精度的影响。
5.1 风环境统计分析结果
本文统计了2016年每月及全年10 min 时距的平均风速分布,并绘制了风速分布直方图。限于篇幅,这里仅给出1月份以及全年总的平均风速分布直方图,见图6。由分布图可得,该地2016年全年以及各月份的10 min 平均风速大都小于4 m·s−1,占比均超过80%;其中4—9月占比超过90%,仅1—2月在80%∼85% 之间,全年的占比为89.1%。7月份的小于4 m·s−1平均风速占比最高,为95.4%,2月的占比最低,为82.7%。整体上冬季出现较高风速(大于4 m·s−1)的概率相对较大,约为15%∼20%;而夏季出现较高风速的概率相对较小,约为5%∼10%;春秋季则居中。
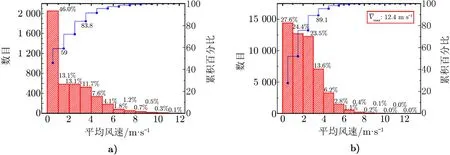
图6 10 min 平均风速分布图
此外,本文统计了每月10 min 平均风速的最大值,并与平均风速大于4 m·s−1的占比进行了对比,结果如图7所示。可以看出,月最大平均风速与平均风速大于4 m·s−1的占比变化趋势相似,表明平均风速总体水平越高,出现最大值的可能性也越大,进一步说明天线的观测精度在冬季更加容易受到较大风速的干扰,而在夏季受较大风速的影响相对较小。
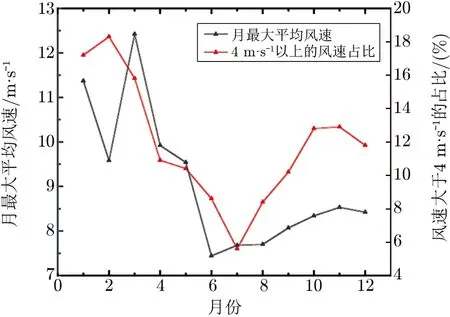
图7 月最大平均风速与大于4 m·s−1 的风速占比
同时,本文绘制了2016年全年以及每个月份的平均风向频率玫瑰图。由图8可知,该地区的主导风向为NWN (北西北),各月份的主导风向也分布在WNW 至NWN 之间。因此,在安排观测计划时,可据主导风向尽量避开不利方位角的高频观测或采取误差补偿措施。
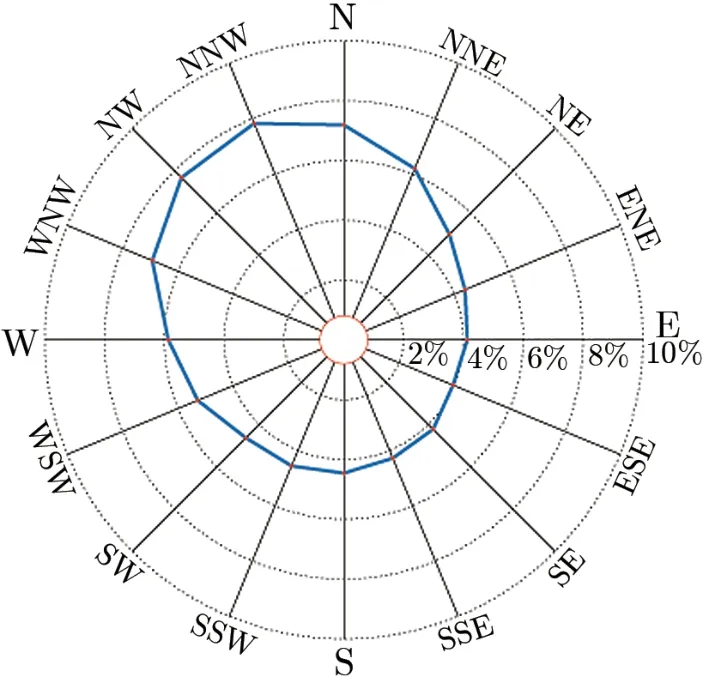
图8 2016年10 min 时距的平均风向频率玫瑰图
5.2 天线平均风荷载数值模拟的实测验证
选用倾斜仪夜间的实测数据进行分析验证,以尽量避免日照作用下温度变化对天线结构的影响[13];选用风速变化较为明显的时段,以便于同模拟结果进行对比;选取天线的不同俯仰状态下的数据。同时提取所需的风速、风向、天线方位和俯仰状态的同步数据,用于模拟并计算相应的风荷载和结构响应,并提取方位轴端点处(倾斜仪布置点)节点(记为M)的位移来计算垂直于俯仰轴方向的倾斜量XT(模拟值)。将计算结果与倾斜仪测得的Lx向倾角数据作对比,即可验证有限元模型和风荷载计算方法的准确性。其中倾斜量XT(模拟值)的计算方法如下:

其中,UY为节点M的Y方向平动位移,ROTX为节点M绕轴X的转动位移,h为点M的离地高度。图9给出20170130,20180125,20180127,20180128,20180316 共5 个不同时段,倾斜仪Lx方向的倾角输出数据时程曲线和同步的有限元模拟所得倾角变化曲线,红色曲线为模拟结果,黑色曲线为实测结果。
对比实测结果与模拟结果所得的倾角变化曲线可以发现,大部分模拟结果与实测结果在变化趋势上较相似,但数值模拟结果的变化幅度多数偏小,为实测结果的80%∼90%。此外,由于在测量过程中,没有再对倾斜仪进行精确的调零,因此模拟数据与实测数据存在整体性的零点漂移偏差,但这并不影响两者的对比。
通过分析,我们找出了产生上述偏差的几种原因:(1)实测数据包含风的动力作用以及温度等其他环境因素的综合作用;(2)有限元模拟中,对平均风荷载作用进行了简化,仅考虑了主反射面的风荷载,而未考虑方位座架、背架等部分的风荷载;(3)风压计算时,按B类地面粗糙度类别而选取了α=0.15,空气密度取ρ=1.25 kg·m−3,与当地的实际情况可能不完全吻合;(4)倾斜仪和测风仪测得的数据都存在随机误差。
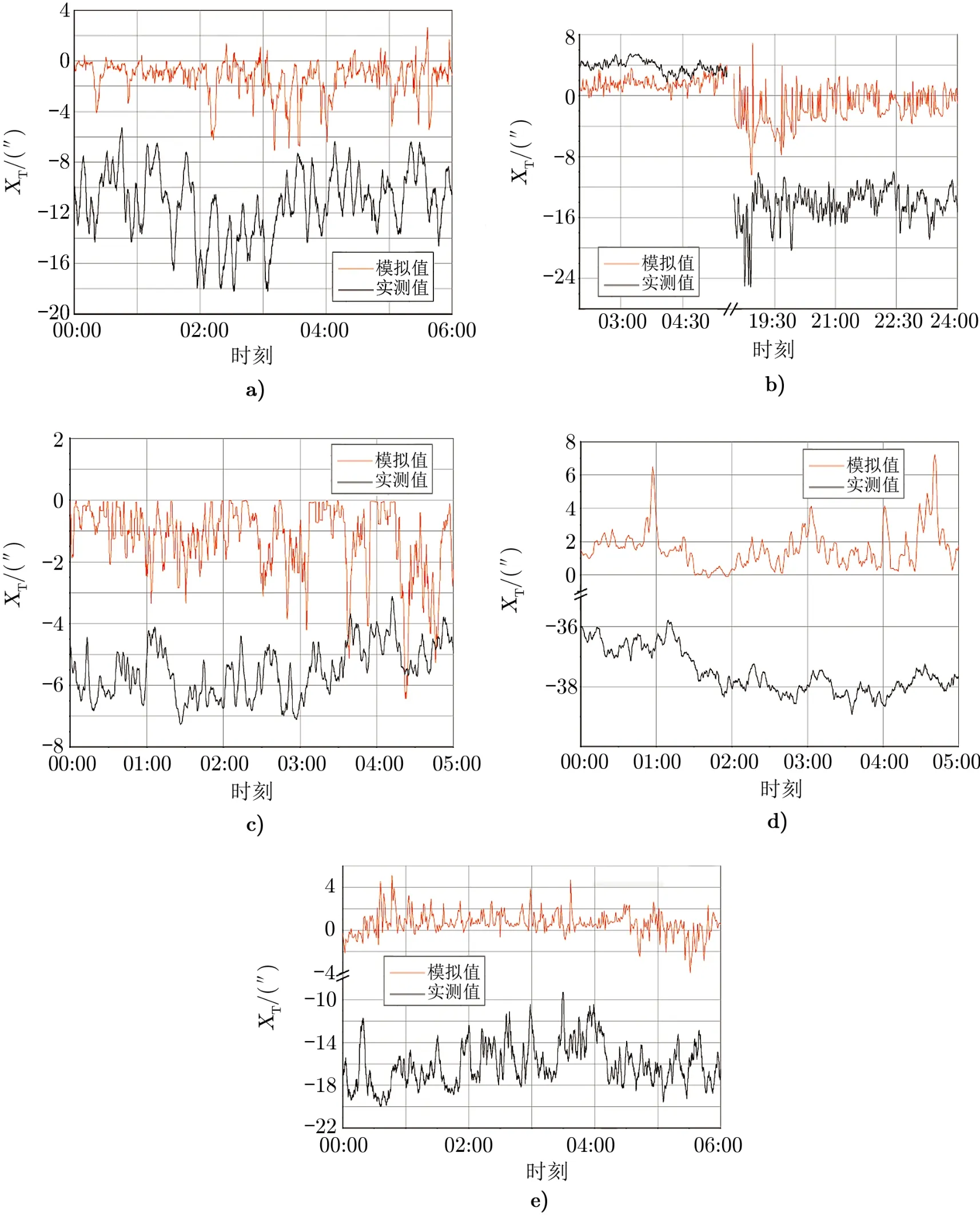
图9 倾角测量结果与数值模拟结果的对比
若要同时考虑上述因素,实现风荷载作用的精确模拟和测量,目前还难以实现。因此,基于对比结果,我们认为:本文所采用的有限元模型和平均风荷载作用计算分析方法具有较好的有效性。对于幅值偏小的问题,可考虑将风压乘以1.1∼1.3 倍的放大系数。下文将进一步分析风荷载作用对天线面形精度和指向精度的影响。
5.3 平均风荷载对天线面形精度的影响
首先分析不同迎风姿态下,天线面形精度的变化情况。天线迎风风向角定义见图10。考虑反射体结构的对称性,风向角范围为0◦∼180◦。选取5◦,30◦,60◦,90◦共4 种俯仰角情况,以及选取0◦,30◦,60◦,90◦,120◦,150◦,180◦共7 种风向角情况,两两组合共计28 种迎风情况,并对其进行计算。参考平均风速分布的统计分析结果,TM65m 的工作风速多数小于4 m·s−1,因此这里取标准参考高度(10 m)处4 m·s−1作为计算风速。RMS的计算结果见图11。

图10 风向角定义示意图
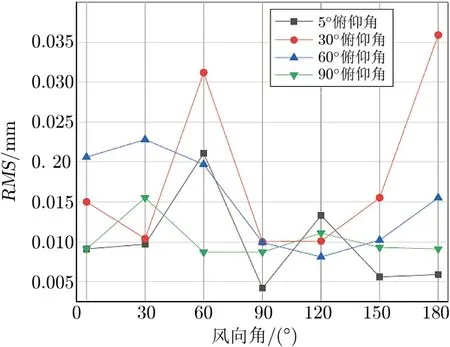
图11 不同工况下RMS 变化图
从图11可知,俯仰角为5◦和30◦时,RMS的极值风向角均为60◦;俯仰角为60◦和90◦时,对应的RMS极值风向角为30◦。其中,俯仰角为30◦和风向角为60◦时,RMS为最不利迎风情况;俯仰角为60◦和风向角为30◦时情况次之;最大值为0.032 mm。而俯仰角为5◦及风向角为90◦时对应的RMS最小,最大值约为最小值9 倍。俯仰角为90◦时,风向角的变化仅引起主反射风压分布绕反射面中心对称轴的相对转动,结构以及受力状态的对称性保持较好,故其RMS的变化也较小。
风速对RMS的影响:笔者针对天线不同迎风姿态的情况,计算了不同风速下的RMS值。限于篇幅,这里选取上述最不利迎风情况,以及风向角为0◦情况,给出RMS随风速的变化曲线,如图12和13 所示。
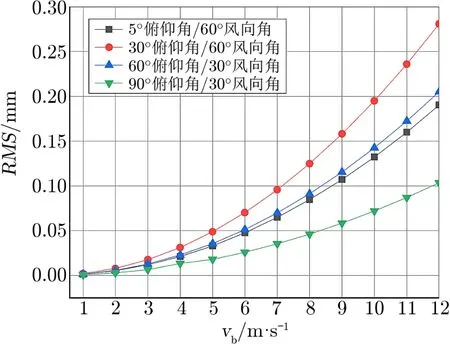
图12 不利迎风情况RMS 随风速变化曲线
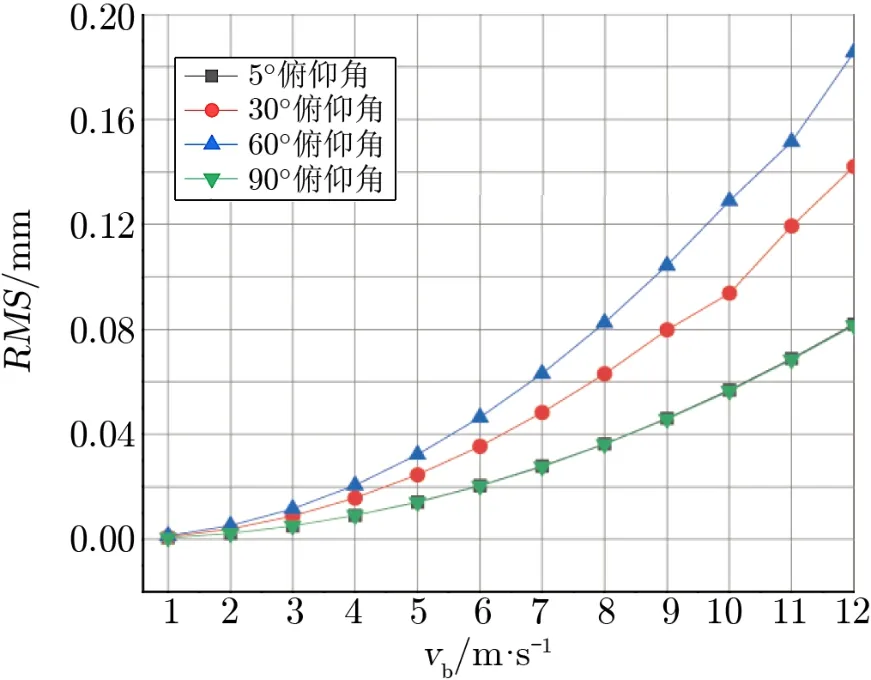
图13 风向角为0◦时RMS 随风速变化曲线
通过对比,我们发现RMS与风速之间近似为二次关系。主要原因为,天线结构在计算风速范围内处于弹性变形范围内,风速的变化只会引起主反射面各节点位移大小的变化,并未引起节点位移分布形式的较大变化。因此同一迎风姿态下,在弹性范围内RMS与风压近似为线性关系,与风速则近似为二次关系。此外如图12所示,俯仰角为30◦及风向角为60◦的情况在风速变化时,RMS值始终最大。由图13可知,俯仰角为60◦时最不利,俯仰角为5◦和90◦时的曲线基本重叠,这与图12中的情况相符合,也进一步说明,俯仰角为30◦和风向角为60◦时,RMS为最不利迎风情况。
5.4 平均风荷载对天线指向精度的影响
首先分析迎风姿态对天线指向精度的影响,迎风情况和计算风速的选取同4.3 节,如图14和15 所示,分别为方位指向误差,俯仰指向误差的变化情况。
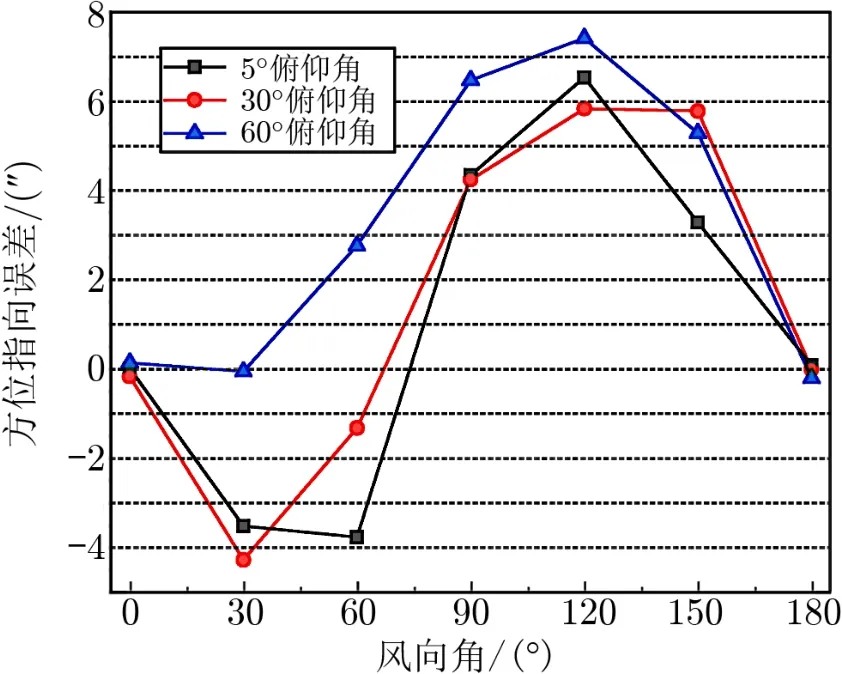
图14 方位指向误差随俯仰角和风向角变化曲线
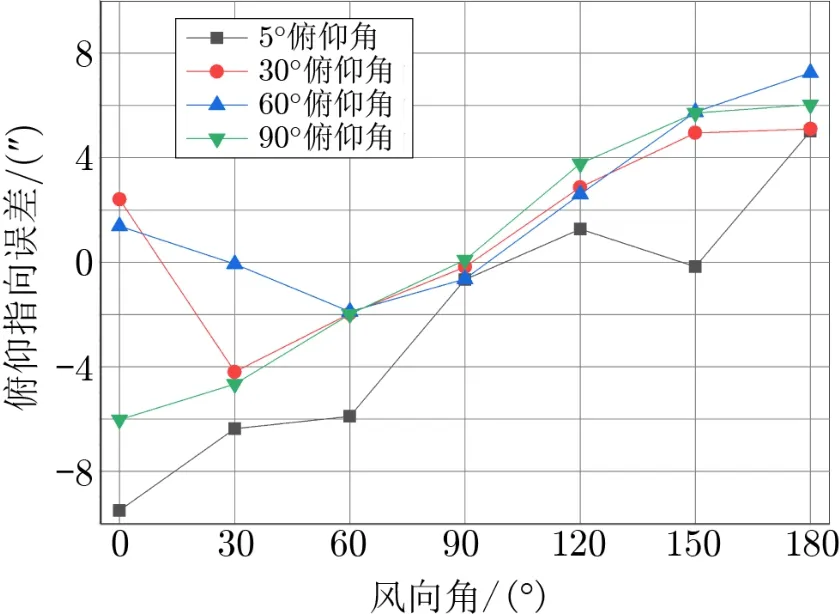
图15 俯仰指向误差随俯仰角和风向角变化曲线
由图14可以看出,随着风向角的变化,不同俯仰状态下的方位指向误差表现出相似的变化规律:在风向角为30◦和风向角为120◦时,分别达到负向和正向最大值;风向角为0◦和180◦时,对应的误差最小。
图15中,随着风向角的变化,不同俯仰角下俯仰误差的最大值对应的风向角不完全一致,俯仰角为5◦和90◦时,0◦风向角的误差最大;俯仰角为30◦和60◦时,180◦风向角对应的误差量最大;在90◦风向角附近,4 条曲线均趋于零。风向角为0◦和180◦时,前者凹面迎风,后者凸面迎风,均为迎风面投影面积最大的工况,90◦则为迎风面投影面积最小情况,说明俯仰误差在一定程度上与迎风面投影面积正相关。其中俯仰角为30◦和60◦时,0◦风向角和180◦风向角对应的俯仰误差符号相同,这是由于俯仰误差的方向由反射面风压的相对分布情况,而非风压整体的正负号决定。
值得注意的是,无论方位误差还是俯仰误差,都仅在少于半数的情况下满足风速为4 m·s−1时且指向误差小于3′′的跟踪指向精度要求[1]。说明平均风作用对天线指向精度的影响是不容忽视的。
在不同迎风姿态下,我们进一步对天线指向误差随风速的变化进行了计算,并给出风向角为0◦时的计算结果,如图16和17 所示。可以看出,指向误差与风速间近似为二次关系,与面形精度的情况相似;不同情况的差异与风速为4 m·s−1时的计算结果也相符,这里不再赘述。
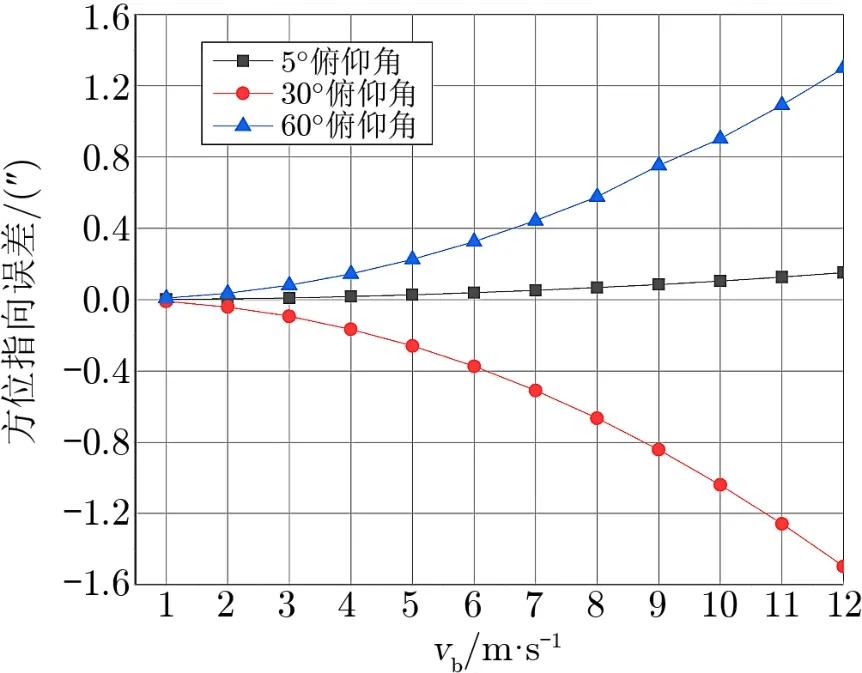
图16 风向角为0◦时方位误差随风速变化曲线
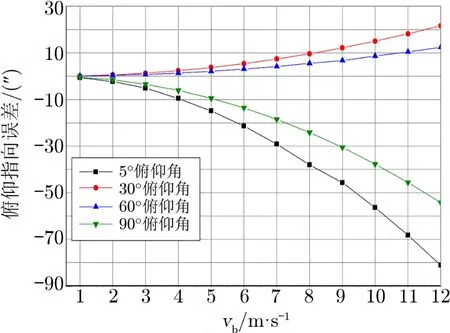
图17 风向角为0◦时俯仰误差随风速变化曲线
6 总结和展望
TM65m 地区的主导风向为NNW (北偏西)方向;10 m 高度处10 min 时距平均风速主要在0∼10 m·s−1,占比超过99%,风速小于4 m·s−1的月度和年度占比在80%∼90% 之间;平均风速极值约为12.4 m·s−1;冬季平均风速大于4 m·s−1的占比较高,夏季则较低,春秋居中,说明天线在冬季受到较高风速影响的概率较高。
仅考虑主反射平均风荷载时,模拟结果与实测结果在变化趋势上能够较好地吻合,说明本文所采用的模拟方法是有效的。
不同俯仰状态下,受平均风影响的天线主面面形精度在风向角为30◦∼60◦时普遍较差。俯仰角为30◦及风向角为60◦时,RMS最大值为0.032 mm (风速为4 m·s−1),但远小于重力作用下RMS的最大值0.89 mm[14],因此,在风速小于4 m·s−1时,平均风载荷对面形精度的影响可忽略不计。在各迎风姿态下,RMS与风速间均近似为二次关系,符合弹性形变与荷载(平均风压)以及风压与风速间关系的传递结果。
在不同俯仰状态下,方位指向误差随风向角的增加表现出相似的变化规律;不同俯仰状态下,俯仰误差的表现也较为相似。各俯仰角下方位误差最大值均出现在风向角为120◦的情况下,俯仰误差最大值则出现在风向角为0◦或180◦的情况下。风向角约为90◦的俯仰误差均趋近于最小值,说明俯仰误差与天线迎风面投影面积间存在一定的正相关关系。指向误差与风速间同样近似为二次关系。风速为4 m·s−1时,多数情况的方位和俯仰指向误差均大于指向精度要求(为3′′),且俯仰误差大于方位误差。说明平均风对面形精度影响较小,对指向精度尤其是俯仰方向的指向精度影响较大。
本文仅考虑了主反射面的平均风荷载作用,实际风的动力作用和天线其他部分的风荷载对天线精度的影响更明显,因此有待建立更加精细的模型,以开展进一步的研究。
致谢
感谢中国科学院上海天文台的观测工程师在观测实验中给予的帮助,感谢王玲玲高级工程师提供的风速风向实测数据。
猜你喜欢
无线电通信技术(2024年2期)2024-07-15 00:00:00
无线电通信技术(2024年2期)2024-07-15 00:00:00
无线电通信技术(2024年2期)2024-07-15 00:00:00
高原地震(2021年2期)2021-10-08 01:30:00
科学技术创新(2020年6期)2020-04-18 06:18:04
同济大学学报(自然科学版)(2018年10期)2018-11-02 07:17:14
小资CHIC!ELEGANCE(2016年26期)2016-12-13 20:06:51
知识经济·中国直销(2016年3期)2016-02-27 16:15:34
无线电通信技术(2015年3期)2015-12-23 11:37:02
防灾减灾学报(2015年3期)2015-12-16 16:15:42