基于DG-RRT的UPV航迹规划方法
2019-07-10 07:14:12奚伟袁宝华张昊陈自力郭明明
指挥与控制学报 2019年2期
奚伟 袁宝华 张昊 陈自力 郭明明
1.解放军69250 部队新疆乌鲁木齐830000 2.陆军工程大学无人机工程系河北石家庄050003 3.陆军航空兵学院无人机研究中心北京101123
无人软翼飞行器(Unmanned Parafoil Vehicle,UPV),是一种柔性翼伞悬挂动力飞行系统.与固定翼飞机相比,UPV 具有升阻性能好、载荷能力大、巡航时间长等优势,在军事与民用领域,特别是侦察定位、毁伤评估等任务中都具有巨大的应用潜力,已逐渐成为无人飞行器领域的研究热点.因此,针对不同任务下的航迹规划研究对实现UPV 可靠的自主飞行具有重要意义[1−3].
当UPV 执行威胁空域侦查或灾害救援任务时,往往需要在复杂环境下进行低空飞行,为满足飞行安全性、可行性和优化性的要求,规划过程必须充分考虑翼伞的机动性能、空域威胁信息等约束条件,保证所规划航迹和控制输入在实际中具有可操作性[4].目前,根据获取航迹点方式的不同,飞行器航迹规划方法主要分为确定性方法和随机性方法[5−6]:
确定性方法主要通过建立空间信息模型或数学模型来求解计算可行的飞行航迹,典型方法有A∗算法[7]和人工势场法[8],但两种经典方法分别存在高维空间性能变差和局部极小点问题,容易导致规划失败.
随机性方法采用对每段航迹进行碰撞检测,无需对整体空间信息建模,具有扩展性强的优点,有效解决了局部最小点问题和高维度“组合爆炸” 问题.最具代表性的方法有概率路线图法(Probabilistic Road-map MeDGod,PRM)[9]和快速扩展随机树法(Rapidly-exploring Random Tree,RRT)[10].其中,RRT方法是在任务空间中以节点生长的方式构建起始点到目标点的随机树,是一种更有效的航迹规划方法,但同PRM 方法一样,均匀的随机扩展策略导致算法遇到复杂环境规划问题时,规划结果存在优化不足的问题且没有考虑对象运动性能的约束.
本文考虑UPV 飞行环境并结合实际应用价值,选择搜索效率更高、实时性更好的RRT 方法进行飞行过程的航迹规划,在此基础上对传统RRT 进行改进,提出了基于深层诱导RRT(DG-RRT)的UPV 优化航迹规划方法.首先,建立UPV 的运动性能和威胁环境模型,并给出了对象的性能约束和规避条件;然后,对传统RRT 方法进行改进,通过引入面向目标的诱导式采样策略、新节点扩展策略,以及航迹平滑度优化策略,提出DG-RRT 航迹规划算法; 最后,仿真分析所提算法在威胁条件下的任务规划性能,验证了算法的有效性.
1 问题描述
1.1 系统质点模型
对UPV 巡航飞行,完成侦察任务的需求,本文将UPV 等效为一个具有飞行信息的质点,建立运动模型[11]
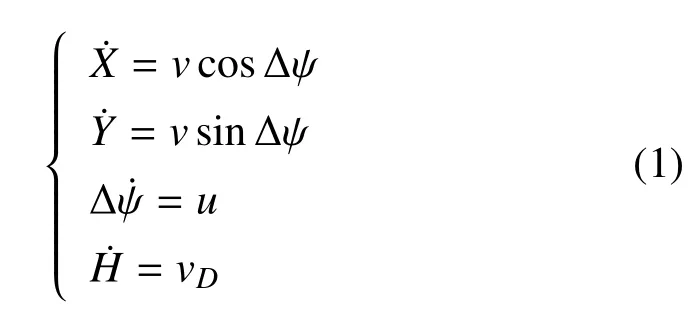
式中,(X,Y,H)表示大地坐标系,v表示翼伞水平速度,∆ψ 表示翼伞转弯偏航角,u表示控制量(翼伞尾沿下拉量),vD表示翼伞垂直速度.
1.2 运动性能约束
根据UPV 质点模型与飞行特性,在航迹规划时应充分考虑飞行器的机动性能.这里主要对UPV 的航向角变化量进行约束,即∆ψmax(∆ψmax∈R+)为搜索步长内的最大航向角变化量,则UPV 的机动性能为[12]

1.3 威胁障碍规避
根据UPV 质点模型与飞行特性,在航迹规划时应充分考虑飞行器的机动性能.这里主要对UPV 的航向角变化量进行约束.针对UPV 的任务环境和需求,本文重点研究敌情威胁对系统的影响[13].
采用概率威胁法[14−15]对UPV 任务空间中任意位置的敌情威胁进行量化描述.设任务空间C中存在M个威胁源,则系统在状态s时的受威胁概率P(s)可以表示为

其中,Pk(s)表示第k个地面威胁的概率.
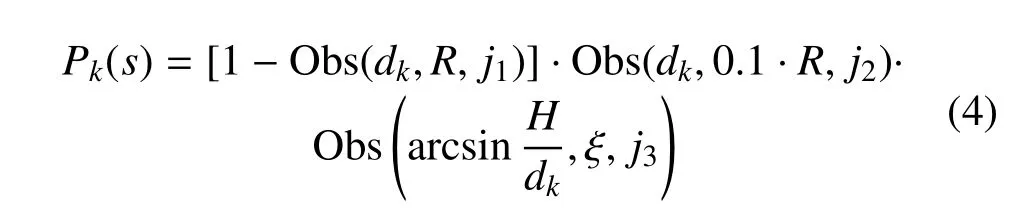
式中,dk表示翼伞到第k个地面威胁的距离,R为地面威胁的作用半径,ξ 为威胁源覆盖角,Obs 函数为

式中,ji(i=1,2,3)为函数可调系数.
综上,在环境空间C中,UPV 始终位于安全范围Cfree中的威胁规避条件可以表述为

2 DG-RRT 航迹规划算法
2.1 模型传统RRT 方法
RRT 方法作为一种随机性规划方法,能够有效克服确定性方法中的局部最小点问题和高维度“组合爆炸”问题[16].然而,RRT 方法的缺点是均匀的随机扩展策略导致算法遇到复杂环境规划问题时,规划结果存在优化不足的问题且没有考虑对象运动性能的约束,如图1所示.
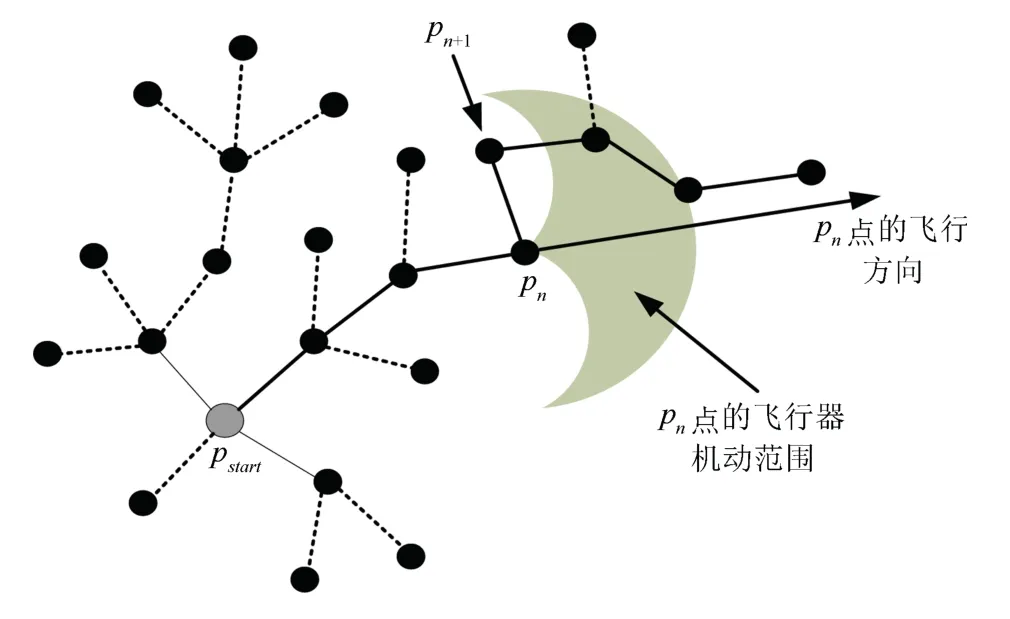
图1 传统RRT 方法航迹规划结果
2.2 面向目标的诱导式采样策略
传统RRT 在搜索时,其方向的随机性导致算法收敛速度变慢[17].在采样时引入诱导式策略,即将最终目标点作为下一节点的概率设置为τ1(0 ≤τ1<1),即P(prand=pgoal)=τ1,保证始终以一定概率向终点扩展,在提高扩展方向性的同时,加快了搜索速度和收敛速度[18].
2.3 新节点诱导式扩展策略
在选取新节点时,采用诱导式扩展策略,即将目标点方向设定为下一节点飞行方向的概率设置为τ2(0 ≤τ2< 1),其中γi∈(−π,π]表示节点pi的飞行方向ψi与pi到pgoal的夹角,此刻P(|γi+1| < |γi|)=τ2.这样可以使UPV 在搜索前进时始终以一定概率向终点趋向,进一步增强了算法的搜索性能.转向趋势随τ2的不断增大而增大.
2.4 航迹平滑度优化策略
在加入深层诱导式机会因子τ1、τ2的基础上,进一步考虑飞行器的操控性能,加入转弯幅度可调因子σ (0 < σ ≤1),将相邻节点间飞行方向的变化幅度限制在更小的可调范围内,即∆ψ´=σ∆ψmax,充分发挥飞行器的性能,增强航迹的局部平滑度和运动可行性,当σ →0 时,航迹趋于光滑[19].另,当τ1=τ2=1 且σ=1 时,算法策略等同于传统RRT.
3 仿真实验分析
指定空域的巡航飞行侦察是UPV 的主要作战任务之一,任务过程中UPV 所面临的威胁主要来自地面的雷达探测、防空火力打击等敌情威胁.因此,本节应用上文提出的DG-RRT 航迹规划方法,将敌情威胁等效为特定高度的随机威胁点和固定威胁覆盖区域,对动态随机威胁和固定威胁两种条件下的UPV 航迹规划问题进行仿真分析,通过对比传统RRT 的搜索性能,验证所提方法的有效性,具体参数设置如表1.
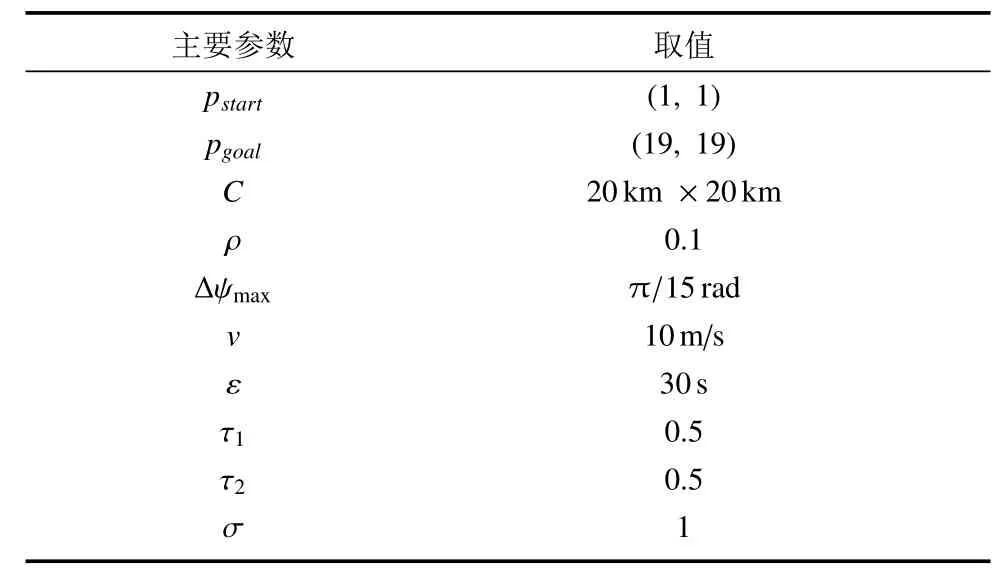
表1 实验参数设置
3.1 随机威胁航迹规划
图2为任务空间中存在150 个随机威胁障碍时,本文所提DG-RRT 与常规RRT 从起始点到目标点航迹规划的实验结果,其中深色填充区域为随机威胁障碍.由图2(a) 可以看出,常规RRT 方法未考虑UPV 的运动性能约束,规划航迹较为曲折且包含频繁转向等大机动动作,实际飞行时跟踪控制难度大,在某些区域甚至已经超出UPV 的机动能力,导致无法完成跟踪.图2(b)为采用DG-RRT 方法时的实验结果,由图中观察可见,算法充分考虑了UPV 的运动性能和控制输入约束,避免了不必要的转向,引入的优化策略,使航迹点间光滑连接,提高了整体和局部航迹的平滑度和可跟踪性,适用于UPV 的实际飞行.
3.2 固定威胁航迹规划
图3为任务空间中包含10 个固定威胁时,RRT与DG-RRT 航迹规划的实验结果,其中深色填充区域表示固定威胁障碍,图中规划结果表明,从起始点到终点的运动方向上设置有两个威胁陷阱.实验结果表明,RRT 与DG-RRT 均能通过一定数量的树节点搜索绕开陷阱,到达目标点.但从搜索树的扩展过程可以看出,RRT 需要在搜索树节点遍历整个任务空间后,才能找到安全可行航迹,而DG-RRT 搜索树的生长始终朝向目标点,且新节点的飞行方向指向目标点,减少了对未知区域不必要的搜索,提高了规划效率,航迹更加平滑有效.
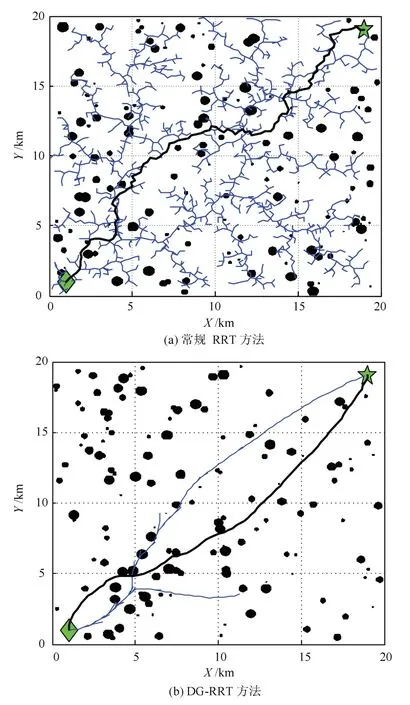
图2 随机威胁任务环境的航迹规划结果
表2给出了两种算法主要指标的性能对比.统计数据表明,DG-RRT 能够有效减少规划时间,缩短规划距离,相比于RRT,分别减少了65%和20%.
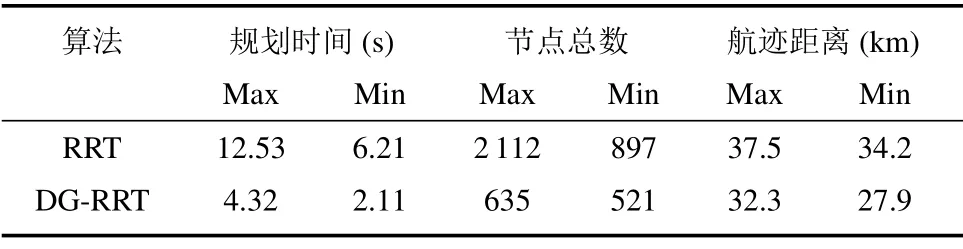
表2 算法性能对比
通过引入诱导式搜索策略和航迹优化策略,能够在提高搜索速度的同时,增强所规划航迹的光滑度和可行性.
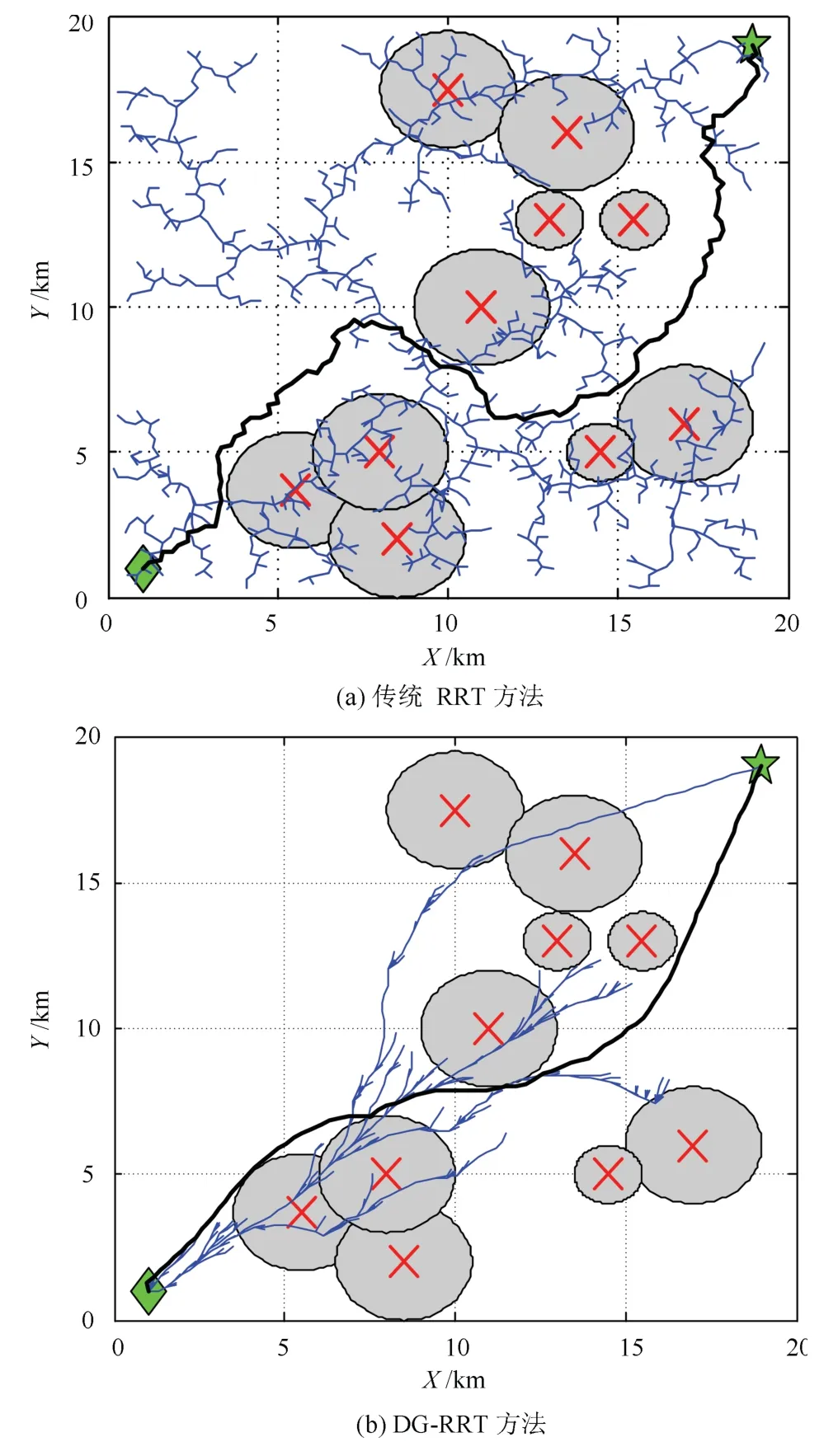
图3 固定威胁任务条件下的规划结果
4 结论
对UPV 巡航飞行,完成侦察任务的需求,本文将UPV 等效为一个具有飞行信息的质点,建立运动模型,本文对UPV 威胁任务条件下的航迹规划问题进行了研究.首先,针对传统RRT 方法的缺点,构建UPV 运动质点模型和环境威胁模型,进一步考虑UPV 的运动性能,给出了性能约束和威胁规避条件;其次,通过引入面向目标的诱导式采样策略,新节点扩展策略,以及航迹优化策略,构建了一种基于深层诱导RRT(DG-RRT) 的优化航迹规划方法; 最后,分析了威胁环境条件下,DG-RRT 在任务空间中的航迹规划性能,对比传统RRT 方法,算法能够在加快搜索速度的同时不断向终点趋近,快速规划出从起点到终点的光滑安全航迹,提高了航迹的平滑度和可行性.
猜你喜欢
红领巾·探索(2020年5期)2020-05-19 15:28:03
青年歌声(2019年12期)2019-12-17 06:32:32
小学科学(学生版)(2018年9期)2018-09-21 09:13:52
领导决策信息(2018年50期)2018-02-22 06:17:16
家教世界(2017年11期)2018-01-03 01:28:49
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
商周刊(2017年5期)2017-08-22 03:35:26
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
中国卫生(2016年2期)2016-11-12 13:22:16
中国工程咨询(2016年4期)2016-02-14 07:28:28