机载多功能海上监视雷达系统设计与关键技术研究
2019-07-06 06:12王燕宇中国电子科技集团公司第三十八研究所合肥230088孔径阵列与空间探测安徽省重点实验室合肥230088海军驻合肥地区军事代表室合肥230088
雷达学报 2019年3期
蒋 千 吴 昊 王燕宇(中国电子科技集团公司第三十八研究所 合肥 230088)(孔径阵列与空间探测安徽省重点实验室 合肥 230088)(海军驻合肥地区军事代表室 合肥 230088)
1 引言
由于机载平台高度的优势,机载雷达提供了舰载或岸基地面雷达所不能的强有力的大范围海面监视能力[1]。随着飞机平台的发展,特别是长航时无人机平台超越了有人机的续航能力、无人直升机系统可随舰出海进行前出对海探测,成为各国海军维护海上主权的重要力量。机载多功能海上监视雷达具备广域搜索的能力,可在方位向360°大范围覆盖,并对重点海域和时敏目标进行持续跟踪监视,兼顾对海上目标的搜索、监视、分类,并具备对岛礁、港口等陆地场景的高分辨率成像。
目前机载多功能海上监视雷达已经在民用和军用方面得到了广泛应用。其中战争时期的军事任务主要包括反舰、反潜超视距目标指示、沿岸、岛礁地面运动目标探测和静止固定目标合成孔径成像测绘侦察任务、空中目标探测等;和平时期的非军事任务主要包括水面搜救、反走私、非法移民控制、经济区巡逻和海面污染源监控等[1]。
本文针对机载多功能海上监视雷达的应用需求和系统特点,对系统设计中的雷达体制选择、工作参数选择和工作模式设计等进行了论述,并对影响其关键性能的强海杂波中慢速目标检测、跟踪和目标识别问题以及解决问题的技术途径进行了分析和论证,可为机载多功能海上监视雷达系统的设计与实现提供依据和参考。
2 国外技术发展现状及系统特点
2.1 机载多功能海上监视雷达发展现状
面对来自海上威胁和维护海洋权益的需要,国外对海监视雷达的研究和产品研制起步较早,在上世纪60年代就有产品问世,如60年代到80年代末美国海军陆续装备的AN/APQ-137/137B/137V等海上搜索雷达,主要工作方式有导航、动目标指示、目标截获与跟踪、火力控制、合成孔径雷达成像、气象探测和地形规避等功能。1990年后,成熟的机载对海雷达大量涌现,其中有AN/APS-128(D),VARAN, ARl599, ORB3203, Seaspray5000/7000/7500E, MFAS(Multi-Function Active Sensor)和AESA Radar等,国外多型产品已得到广泛应用与验证。经过长时间的发展,已有多个国家的多个公司推出了成熟的产品,并形成了产品系列化、平台多样化的特点,随着技术的发展、需求的提高,该类装备仍处于不断发展和完善之中[1,2]。
近年来,适装于机载平台的对海侦察监视雷达得到了快速发展。成熟的机载多功海上监视雷达主要集中在美国、欧洲一些发达国家等,主要有美国Raytheon公司的SeaVue“海妖”雷达(如图1所示)[3]、法国Thales公司的Ocean Master雷达(如图2所示)[4]、以色列埃尔塔公司研制的EL/M-2022A/H/U型雷达(如图3所示)[5]、欧洲雷达制造商意大利芬梅卡尼卡公司子公司SELEX GALILEO公司的Seaspray系列AESA雷达(5000E、7500E等,如图4所示)[6]、美国Raytheon公司为美国海军MQ-4C广域海上监视无人机系统(BAMS UAS)研制的多功能有源传感器(MFAS),正式编号为AN/ZPY-3型多功能相控阵雷达(如图5所示)[7,8]等。其中MFAS雷达是第1种能够从极远的距离对海洋及沿岸提供360°持续覆盖的雷达系统,采用了二维有源电子扫描阵列(AESA),具备空海模式和空地模式,可以远距探测、跟踪和识别海上和沿岸的多批目标。
2.2 机载多功能海上监视雷达主要功能

图1 美国Raytheon公司研制的SeaVue“海妖”雷达组成单元实物及工作效果图Fig.1 Physical and operational results of SeaVue “Sea monster” radar component units developed by Raytheon company, USA

图2 法国Thales公司研制的Ocean Master雷达组成单元实物图Fig.2 Physical charts of Ocean Master Radar component units developed by Thales company of France
综合研究国外机载对海监视雷达装备和技术的发展,当前国内外机载多功能海上监视雷达典型使命任务包括:海上巡逻、海上搜救、海上封锁、专属经济区巡逻、反走私/非法移民控制、渔业保护、整合AIS功能等。主要功能有:
图3 以色列埃尔塔公司研制的EL/M-2022A型雷达组成单元实物及工作效果图Fig.3 EL/M-2022A radar component units developed by Elta company of Israel

图4 SELEX GALILEO公司研制的Seaspray 5000E海面搜索雷达实物与工作效果图Fig.4 Physical and operational results of Seaspray 5000E marine surface search radar developed by SELEX GALILEO company

图5 美国Raytheon公司研制的MFAS雷达AN/ZPY-3实物与工作效果图Fig.5 Material and working effect diagrams of MAFS radar AN/ZPY-3 developed by Raytheon company, USA
(1) 对海搜索监视(Maritime Moving Tagart Indictor, MMTI):主要用于对海面目标探测(广域搜索监视、敏感区域重点监视),以及对海上目标进行分类判性;
(2) 对地合成孔径成像(SAR):主要用对地面和静止目标连续成像以及从不同角度对某一目标的持续成像观察,满足用户对地侦察和测绘的需求,以及用于海面溢油探测的需求;
(3) 对地动目标指示(Ground Moving Tagart Indictor, GMTI):对地面运动目标(车辆、坦克等)检测和跟踪监视;
(4) 对低空目标探测(Air Moving Tagart Indictor, AMTI):对低空运动目标(直升机等)检测和跟踪监视;
(5) 辅助导航:综合气象探测和地形规避,提高飞机海上飞行的安全性。
2.3 机载多功能海上监视雷达系统特点
综合研究国外机载对海监视雷达装备和技术的发展,机载多功能海上监视雷达系统特点总结如下:
(1) 多功能集成,以对海面舰船目标搜索监视为主,集成了对低空目标、地面慢速动目标探测功能,集成对地面高分辨率成像功能,具备对航路前方气象探测等辅助功能;
(2) 应用范围广泛,除了海上搜索监视外,还可用于溢油监测、海冰探测,以及为飞行安全提供辅助导航;
(3) 技术体制采用日趋成熟的有源相控阵技术,强化数字信号产生及高性能数字信号处理技术应用;
(4) 面向用户需求,在多功能集成的技术上突出模块化设计,简化设备单元组成,具备多种标准外部接口,提高设备可靠性、可维性及综合保障性能。
3 系统设计考虑的主要因素
机载雷达的安装与飞机平台气动外形休戚相关,在保证不影响飞机飞行特性的前提下合理优化天线的布局安装设计,将直接影响雷达系统的设计。雷达与其他任务载荷以及武器装备共同装机时,其尺寸、重量和功耗等受到严格限制,因此,多功能的实现需要优化雷达系统设计,综合多种工作模式的雷达系统设计技术,在硬件设备共用的前提下优化系统架构、系统时序等设计,并通过仿真论证及试验验证,构建满足战技指标体系要求的机载多功能海上监视雷达系统。
下文将重点介绍机载多功能海上监视雷达系统设计中的几个关键问题。
3.1 设计原则
从任务目标和任务使命出发,详细设计与实施过程中结合载机特点,统筹考虑雷达系统设计方案,在充分发挥飞机广域海上监视潜能的同时,确保雷达与飞机平台机、电、热适配性。同时坚持“适用、可靠、先进、经济”原则,贯彻通用化、系列化、组合化要求,充分考虑技术的成熟度,提高设备可靠性,确保“管用、好用、实用和耐用”。
3.2 工作频段选择
机载雷达一般工作于微波频段,具体频段选择需综合装机限制、作战任务、工作环境、探测对象、性能指标等多种因素。
以对海面舰船目标进行搜索、跟踪和目标指示为主要任务的对海探测雷达系统,窄的方位波束宽度有利于区分舰船目标。波束宽度与雷达波长成正比,因此,系统设计时需合理选择工作频段。此外还应考虑电磁波传播时的气象损耗等。
机载多功能海上监视雷达系统设计时,需考虑到探测区域未知气象条件对作战效能带来的影响。电磁波在均匀雨中的衰减对2 GHz以上通常是重要的,当雨滴比波长小时,衰减正比于频率的2.3~2.8次幂。在此区间,衰减系数(dB/km)通常表达为

根据上述公式可以计算雨衰,相比S, C和X波段,在目标探测区域同样气象条件下时,工作于Ku频段雷达的探测距离将比工作于S, C和X波段时缩短,严重影响作战效能。Ka等频段电磁波的雨衰将更为严重。
3.3 工作极化选择
雷达极化方式的选择主要与海杂波对目标检测的影响和目标特性有关。随着入射和观察方位角的变化,散射场极化也不断发生变化。因此对于雷达的极化选择,重点关注海杂波的影响。
海杂波的特性复杂,至今仍缺少全面而准确的结论。最早用来描述海杂波散射机理的是布拉格散射模型,对该模型完善后产生了调制布拉格模型。调制布拉格模型将散射机理分解为大尺度、慢变分量和小尺度、快变分量。前者对应海面大尺度浪涛结构,后者则对应细小水面张力波。调制布拉格理论也被称为复合表面理论,根据该理论,垂直(VV)极化回波比水平(HH)极化回波具有更大的幅度[10]。
由于早期雷达距离向分辨单元较大,在低海况下HH极化海杂波强度较VV极化要低,在高海况下两种极化对应的海杂波强度趋于一致,对海搜索雷达的极化选择以HH极化为主。
随着对海杂波研究的逐步深入,为降低海杂波整体散射强度,雷达信号带宽的不断增加,距离分辨单元相应减小之后,海杂波除调制布拉格散射之外,海杂波的散射分解至海浪的细节部分,由浪碎后的粗糙海面引起的“白帽”散射及浪碎前陡峭波峰表面引起的镜面反射也构成了雷达后向散射功率中的5%~15%,在浅水区域甚至能达到40%~50%,该部分散射也是形成雷达回波中“海尖峰”的主要因素。理论分析及试验数据表明,HH极化对于碎浪的反射比VV极化更加敏感[10]。
海浪随风速的增加而增高,在重力作用下,当海浪失去平衡状态时出现浪花,从而产生破碎波,而破碎波的雷达反射回波即为海尖峰。此时雷达回波强度会明显增强,类似于目标回波,其幅度概率密度曲线表现出重拖尾现象。实验表明,海尖峰易出现在高分辨、低擦地角、高海况以及HH极化方式下,使得海杂波多普勒谱展宽,体现出明显的时变和非平稳特性[11]。
根据对海杂波数据的分析发现,HH极化具有较长的纹理分量相干长度,而VV极化通常较小,这是由于海面对不同极化的散射机理不一样导致的。其次纹理分量相干长度随着分辨率的提高而减小,这是因为随着分辨率的提高,单个分辨单元内海面大尺度结构分量数量减小导致的。因海尖峰的存在,中低海况下X频段海杂波HH极化的标准差平均值是VV极化的标准差平均值的4~7倍,而在高海况下两种极化整体杂波强度趋于一致。此外,VV极化的功率谱密度相比HH极化具有更窄的带宽,且衰减的更快。
综合理论及实测数据的分析,机载多功能海上监视雷达在极化方式选择时应结合雷达具体用途,因不同极化各自有其优势,因此应在产品形态中进行多样性设计,在资源许可的前提下,进行多极化设计,为复杂海况下极化分集探测小目标[12,13]的探索提供技术支撑。
3.4 雷达体制选择
机载多功能海上监视雷达任务载荷装入有人机、固定翼无人机或无人直升机等平台,要解决当前装备对海探测中面临的困境。雷达对海/陆、动/静兼备,多功能高效能集成于一体,对复杂海况下海面目标的广域探测、精确跟踪、准确分类,常规机械扫描体制雷达已无法满足探测需要。
现代雷达体制主要有机械扫描(Mechanical Scanning Antenna, MSA)、电扫描相控阵(Electrically Scanned Antenna, ESA)两大类。对于瞬息万变的战场态势提出的同时多功能的需求,常规体制的机械扫描雷达难以支撑,难以提供后续可扩展的空间。
相控阵雷达从发展阶段来看又分为无源、有源相控阵,从维度上又分为一维相控阵和二维相控阵。有源相控阵体制有两种实现方式,一是模拟有源相控阵体制,二是数字阵列体制。模拟有源相控阵体制与数字阵列体制如图6所示。
20世纪60年代伊始,经过长时间的技术发展,机载海面监视雷达从最初的无源抛物面天线和磁控管发射机,逐渐发展至平板裂缝天线和行波管发射机,进而发展至相控阵雷达体制,从简单波形逐渐发展至多维波形、宽带/宽角扫描等。相控阵体制的雷达具有宽带/宽角扫描和波束灵活调度等优点,数字阵列体制雷达是相控阵雷达的最新发展,相对于模拟相控阵雷达,其体系构架简单、数字化程度高、处理方式灵活,优点很多,优势明显。优点主要有:
(1) 波束控制灵活,具备灵活的多任务能力;
(2) 资源利用率高,雷达探测性能优越;
(3) 空间自由度高,系统动态范围大,抗干扰能力强;
(4) 体系架构简洁,扩展升级能力强。
当前,机载多功能海上监视雷达一般采用两种有源相控阵技术体制,分别是俯仰一维相扫+方位机扫,以及二维相扫+方位机扫。与一维相扫相比,采用二维相扫有明显的功能优势,可有效提升雷达的作战效能,主要表现在:具备扇区搜索时同时对多个目标跟踪能力,具备边搜索边跟踪边成像的能力,具备同时多目标指示能力,扇区跟踪时可实现远近结合和大小兼顾,对陆成像具有更大的成像幅宽以及有源相控阵雷达故障进一步柔性化,任务可靠性高。
3.5 天线尺寸设计
天线是相控阵雷达最重要的单元,是雷达系统的对外接口,与雷达探测目标的能力和效果有密切的关系。天线口径大小决定了天线的许多其它参数,如天线增益、方向性图,进而影响到雷达系统的性能,如功率孔径积、分辨率、SAR模式下的观测带宽、测角精度等。
为确保相控阵天线波束不出现栅瓣,天线线源的水平向间距须满足

其中, λmin为天线的最小工作波长,为波束偏离阵面法向的最大扫描角,为辐射单元数目的倒数。以某型机载多功能海上监视雷达为例,方位向扫描角度不同时,单元间距相应变化,考虑风冷条件单通道收发组件所能提供的平均功率,给出不同扫描角要求、方位向不同单元数时,对应的功率增益积,如图7所示。
在方位扫描±30°, ±45°和±60°时,可以计算出满足功率增益积要求时的方位向单元数目,进一步可将不同扫描方式下对应的天线口径、收发单元、方位波束宽度、收发组件功耗等有源天线参数列表比对权衡。此时方位向扫描范围、方位向辐射单元间距和方位向天线口径等即可确定了。

图6 模拟/数字波束形成示意图Fig.6 Analog/Digital beamforming diagrams
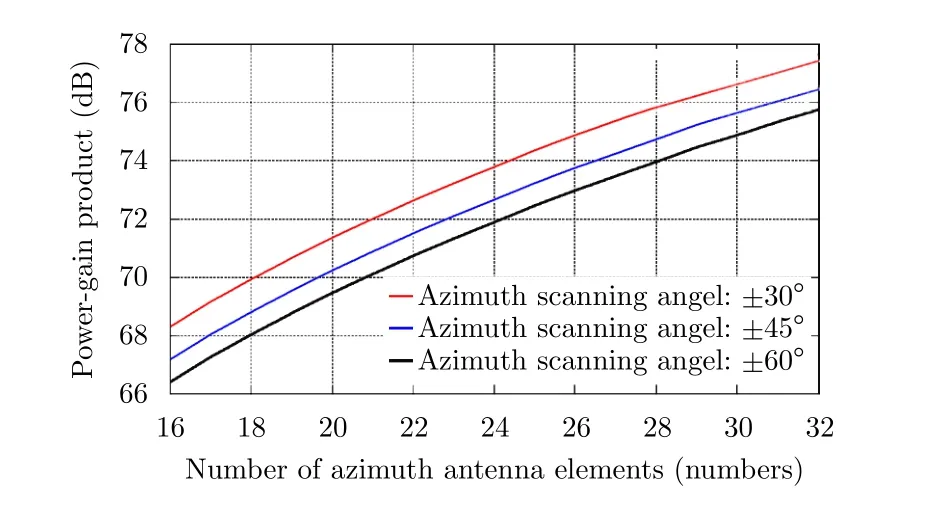
图7 不同扫描角度范围对应的天线功率增益积Fig.7 Antenna power-gain product corresponding to different scanning angle ranges
3.6 作用距离计算
对海探测时,此时海杂波和视距限制是影响探测距离的主要因素,海杂波的影响一般情况下远大于系统噪声。影响脉冲体制雷达检测性能的主要因素是信号与杂波加噪声的比值(信杂噪比SCNR),下面结合相关参考文献[14–16]给出雷达系统总体设计论证时对雷达作用距离的计算公式供参考。
根据脉冲雷达距离方程计算出信噪比(SNR)的表达式

可以看出,信噪比是随着目标距离变化的函数。其中上述方程中各参数的定义:Pt为发射峰值功率;为脉冲宽度;Gt为发射天线增益;Gr为接收天线增益;为目标的雷达截面积;为系统损耗,CB为带宽失配因子。
波束照射范围内杂噪比

其中,海杂波的雷达散射截面积

根据几何关系,图8(a)给出了飞机飞行高度5000 m时波束入射余角(擦海角)随作用距离的变化关系以及根据式(3)—式(5)仿真给出对于海面大中型船只,3级海况下,雷达正常工作时天线转速6 rad/min,信号处理对波束驻留时间内积累的64个脉冲进行非相参积累时,不同作用距离下雷达的信杂噪比。
由图8(b)不同作用距离下回波信号的信杂噪比可知,由于近区雷达波束入射角大,其海杂波对雷达探测影响严重,使得信杂比明显恶化,远区波束入射角小,海杂波影响相对较小,但随着作用距离的增大,系统噪声开始成为影响作用距离的主要因素,目标回波信号强度与杂波信号强度下降比例相当,且都远大于噪声。同时,系统信杂噪比近区不受影响,远区下降较为明显,这与原理性定性分析也相吻合。因此,雷达对海面远距离舰船目标进行探测时,海杂波对目标检测影响较小,而在近区探测时海杂波对目标检测影响较大,此时可采用捷变频,以有效抑制海杂波。

图8 不同作用距离时波束掠射角和信杂噪比变化关系Fig.8 Variation of beam grazing angle and SCNR at different ranges
3.7 系统组成
机载多功能海上监视雷达包括机载雷达设备和显控/信息处理软件两部分,如图9所示。机载雷达装入飞机平台,作为机载任务设备在数据传输分系统等支撑下执行侦察任务;显控/处理软件装入任务控制站,对机载雷达进行状态监测与控制,并接收通过数据传输分析图实时发送的侦察数据,并形成初步的态势显示,并将处理后的侦察信息发送至后端进行情报处理。
机载雷达由天线、低功率射频、伺服转台、信号处理、数据处理、任务管理等组成。由飞机供电,由机载组合导航设备提供飞行状态的姿态、速度与位置等信息,通过机载飞控机提供状态的下传与控制指令,通过信息传输的机载数据终端实现侦察数据的实时传输。
显控/处理软件装于飞机系统任务处理平台(飞机或地面上),基于网络化实现数据交联,通过网络实现雷达监测与控制,对雷达数据进行处理,并通过网络将侦察信息发送至情报处理站。
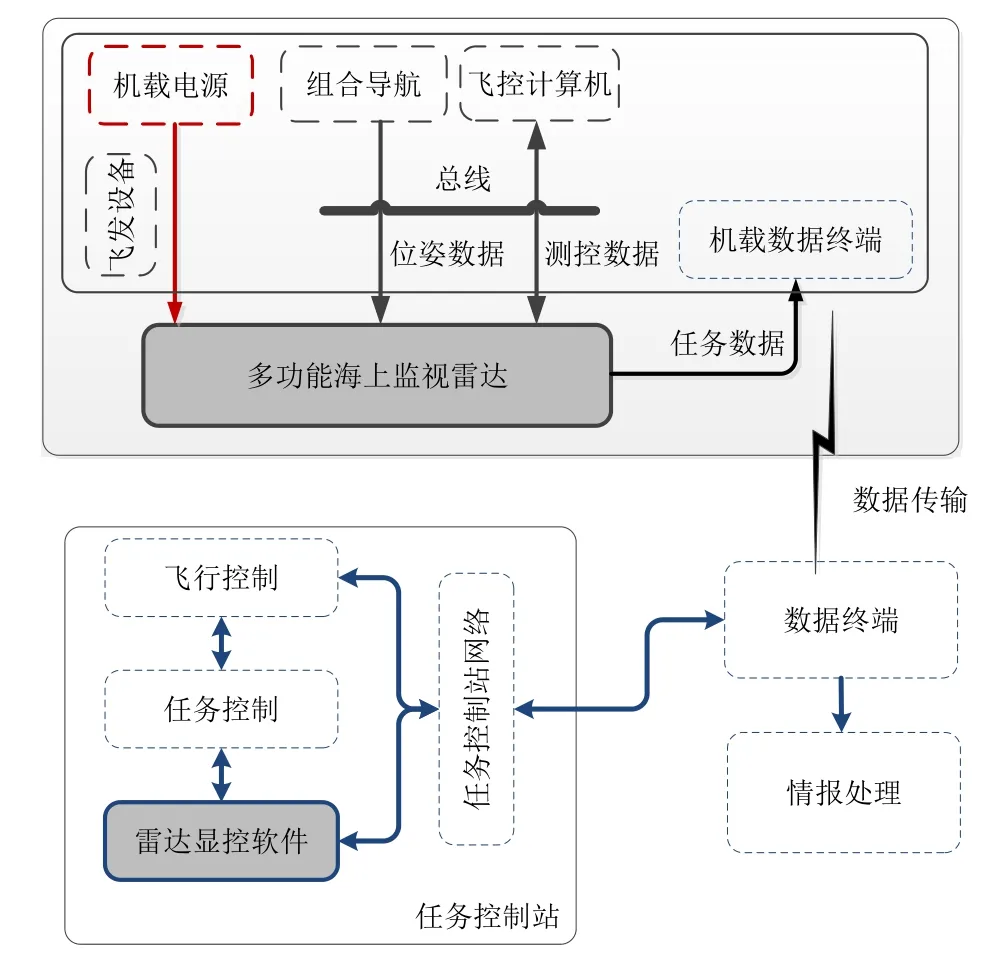
图9 机载多功能海上监视雷达系统组成示意图Fig.9 Composition diagram of airborne multifunctional marine surveillance radar system
4 关键技术问题及其技术途径
机载多功能海上监视雷达的海上作战环境复杂多变,探测目标多样化[11],面临着强海杂波中的海面慢速目标检测与跟踪和海面目标多特征分类识别等技术难点。
4.1 复杂海况强海杂波中的海面慢速目标检测与跟踪技术
机载多功能海上监视雷达面对不同海域、不同海况、不同视角下对海面目标的搜索、检测与跟踪,而海杂波复杂多变的特性将影响雷达的探测性能。因此,强海杂波中的海面慢速目标检测与跟踪技术是机载多功能海上监视雷达面临的一个难点。
海杂波的分布特性是动态和时变的,与雷达系统参数、入射余角和海情等因素相关,并且海面目标具有多种的RCS分布和运动特性,这不但严重影响雷达在强海杂波背景下的目标检测,对雷达系统数据处理技术中航迹起始、数据关联以及目标状态估计等一系列技术提出了更高的要求。对于机载雷达,载机飞行高度不同,则雷达对海面目标探测视向角不同,不同视向角对应的海杂波也是完全不一样,影响雷达对不同距离目标探测性能。
系统设计时主要从空域、频域等方面降低海杂波强度和相关性出发进行设计。通过增加发射信号的带宽,减小距离单元的空间尺度,降低单个距离单元内的回波强度;通过脉组捷变频等频率分集等方式降低海杂波的相关性。
通过对多次飞行试验录取的大量回波数据进行海杂波特性分析,给出了不同距离段雷达回波的幅度分布与统计模型的拟合程度,如图10(a)所示,结果表明机载X波段雷达海杂波幅度分布与Weibull分布模型最接近。K分布适合海杂波变化剧烈的情况,Rayleigh分布适合海杂波分布均匀的情况。此外,每个距离单元的海杂波的时间相关特性基本一致,通过时间相关函数曲线可以给出近区某个距离单元的时间相关函数,如图10(b)所示,可以看出海杂波的时间相关函数具有一个快速的下降期,其后跟随1个较长的衰减过程,统计了强杂波区的去相关时间的概率密度,得到去相关时间约为13.7 ms,如图11所示,与国内外相关文献[17–20]的研究结论吻合。
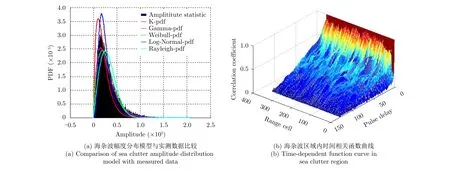
图10 海杂波分布特性分析Fig.10 Distribution characteristics of sea clutter
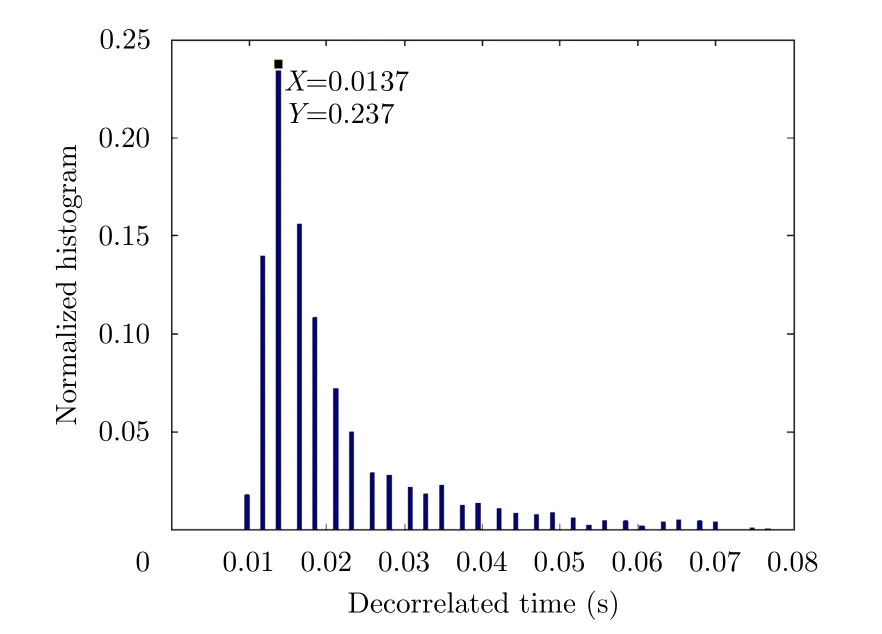
图11 海杂波区的去相关时间统计Fig.11 Decorrelated time statistics in sea clutter area
为了降低空域的海杂波强度,从方位、距离两维降低距离单元的空间尺寸。在满足装机要求(波束宽度难以缩窄)和数据率限制条件下,增加雷达发射信号的频带宽度,进而减小距离单元的空间尺度,降低单个距离单元内的回波强度。
对于较强海况或近区的目标探测,中小型目标会被海杂波所淹没,通过频率分集的方式可降低海杂波的相关性。雷达工作于捷变频时,利用目标和海杂波在统计特性上的不同抑制海杂波,当杂波相关时间内的各发射脉冲之间的跳频间隔大于某个“临界频率”时,频率捷变可以使脉冲间的杂波去相关。去相关之后的海杂波统计特性与噪声相似,此时再通过非相参积累处理提高回波的信杂比。频率捷变能够显著提高海杂波背景下的非相干积累得益,尤其在强海杂波情况下,频率捷变带来的效果更加明显,频率捷变非相参处理原理如图12所示。此外,信号处理算法采用扫描间积累方式、时频分析、长时间相参积累以及高分辨稀疏表示等其他精细化处理方法[21,22]可以提高强杂波中目标检测性能。
好的检测性能转化为最终探测能力还要依赖于数据处理的目标起批建航和航迹跟踪算法。针对机载多功能海上监视雷达对海面船只航线上或岛礁附近的密集群目标或舰艇编队构成的密集群目标的情况,提出了基于在线知识辅助(Knowledge-Aid, KA)的海面目标分级检测方法,实现对海面大中小目标分级检测。对每个波位沿距离单元检测两次,先进行第1次沿距离滑动的检测,再用检测的结果来重新选择参考距离单元进行第2次检测。采用该方法对某机载雷达对海飞行的回波数据的第1个扫描周期的第30波位分析,虚警概率0.0001,参考单元数目25,保护单元数目:左右各2个,分析结果如图13所示,可以看出,通过双重分级检测方法,在密集群目标处增加了6个目标。
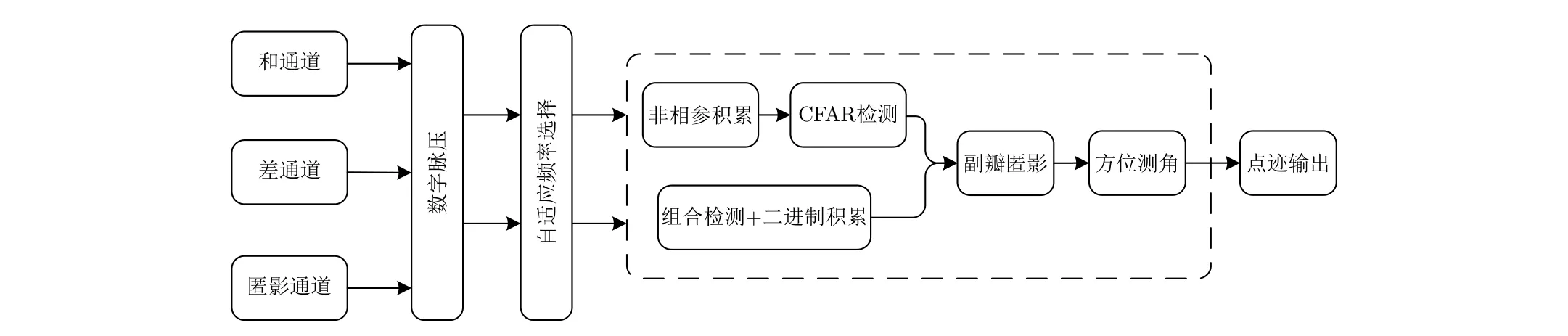
图12 频率捷变非相参处理原理框图Fig.12 Principle block diagram of frequency agility non-coherent processing
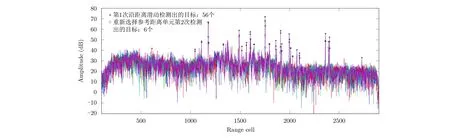
图13 某机载海上监视雷达回波单重检测和双重检测结果Fig.13 Single detection and double detection of echo of an airborne marine surveillance radar
图14给出了某机载多功能海上监视雷达飞行试验对海面目标探测和跟踪结果,跟踪效果连续稳定,与AIS吻合。
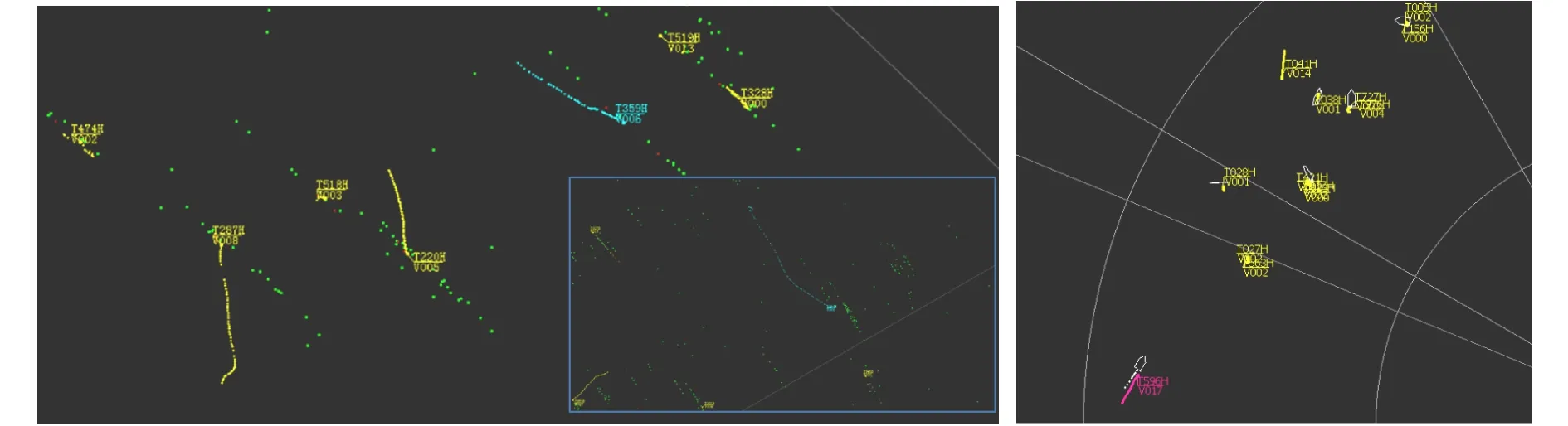
图14 对海面目标检测跟踪结果Fig.14 Detection and tracking results of surface targets
4.2 基于HRR/ISAR的海面目标多特征分类识别技术
海面目标数量庞大,在大量目标中分辨出有用目标至关重要,因而期望机载多功能海上监视雷达具备一定的海面目标特征分类/识别能力。
海面目标分类识别包括群目标分辨、目标分类和目标信号级识别。目前,信号级识别仍存在非常大的困难,因而主要侧重于前2个层面,其主要实现途径包括基于一维高分辨距离像(High-Resolution Range Profile, HRRP/HRR)和二维逆合成孔径雷达(Inverse Synthetic Aperture Radar, ISAR)图像的目标识别技术等。
机载对海监视雷达采用HRR可获取舰船目标的距离向强度分布,但由于目标的起伏与噪声闪烁,难以提供直观的目标分类信息。ISAR成像可利用舰船的滚转所产生的相对多普勒偏移,获得舰船目标的距离-多普勒域的二维散射强度图像,提供了较为直观的目标分类识别途径。但由于飞机、舰船目标均处于运动状态下,且舰船的运动状态完全未知,因此在机载运动平台上,对运动姿态不确定的舰船目标进行高分辨率ISAR成像存在较大的困难,主要难点在于成像数据积累期间对飞机运动偏差的精确补偿,以及对舰船目标数据的参数估计与快速成像。
4.2.1 基于一维距离像的海面目标分类识别
对高分辨雷达的目标回波进行频谱分析获得一维距离像。一维距离像以散射点为模型描述目标的散射中心在径向的投影。当目标运动引起目标视角变化时,各散射点的相对位置必然发生变化,从而引起距离像随视角的变化而变化。引起距离像变化的原因有两个,一是距离走动,二是闪烁现象。
(1) 舰船目标一维距离像回波特性
舰船目标的宽带距离像一般由散射中心模型进行解释,即目标的距离像中每个距离单元的幅度和相位由位于该距离单元内的多个散射点相互干涉形成。对于舰船目标,其自身的舰桥和上层建筑等散射强度较大,且上层建筑具有一定的散布性,因而大型舰船的宽带距离像中具有较多的尖峰。
目标散射点个数、散射点相对强度以及相位均随姿态角的变化而变化,表现为一维距离像距离分辨单元回波幅值的“闪烁”和距离像形状的改变,即所谓的距离像的姿态敏感性。舰船目标相对雷达的姿态角取值范围较大,同一目标在不同姿态角下的距离像的形状和统计特征差异较大。一维距离像能够反映目标外形及大小。
图15给出了某型舰船目标的高分辨距离像,占据了若干距离单元,且有多个散射点尖峰。特定目标的距离像可由距离像的长度、尖峰个数、尖峰位置和相对幅度、距离像的熵以及中心矩进行表征,上述特征的组合可构造目标的特征向量,作为SVM、最近邻等分类器的输入进行目标属性的判别[23]。
(2) 舰船目标HRR目标分类识别方法
首先进行预处理以获得满足信噪比等识别需求的特征信号,然后提取能够反映其长度及散射点分布的特征以供分类处理,进一步地,通过特征优选对所获取的特征进行解耦与优化,获得特征向量,并通过模式分类的方法完成对目标类别的区分。

图15 某型舰船的高分辨一维距离像Fig.15 High resolution one-dimensional range profile of a ship
针对距离像变化的因素,采用包络对齐进行距离对准以使不同脉冲所成的距离像的相关性达到最大,通过非相干平均去噪提高回波的信噪比。在获得有效的一维距离像后,一方面可通过进行模板匹配获得初步判决,另一方面通过对一维距离像提取散射中心相关特征进行分类器的判决,最后通过综合判决获得目标的类别判决。一维距离像分类识别的流程见图16。

图16 一维距离像识别流程Fig.16 One-dimensional range profile recognition process
4.2.2 基于ISAR的海面目标分类识别
雷达在海面动目标指示模式下,检测到海上大型动目标,在发现目标后,切换到宽带ISAR模式,发射宽带信号,波束对着目标进行观测,通过MMTI提供的目标的位置参数,设置宽带ISAR的回波采集窗口,对海上动目标进行ISAR成像,形成目标不同状态下的二维灰度图像,具体工作流程如图17所示[24]。
图18和图19给出了某机载监视雷达对海面运动舰船目标ISAR成像的试验结果,获取了多批次的目标数据及成像结果,可以看出目标的轮廓等信息。通过对图像的判读,提取目标的大小、形状以及强散射点的分布等特征,经过综合后可实现目标型号的初步识别。
在ISAR图像中根据舰船目标的大小(舰船的长、宽)、长宽比、舰船面的设施反射图像的数量、位置、样式、反射波是否均匀等区分舰船种类。高分辨率ISAR图像下,舰船分类的影响因素主要来自3个方面。第1方面为ISAR成像因素,包括ISAR图像的分辨率,入射角,舰船目标旁瓣等。第2方面为海况因素,海况的好坏,直接关系到舰船能否在SAR图像中检测出来,以及特征提取的正确与否。低海况时,海面背景比较均匀,利用各种方法进行舰船检测能得到较佳结果,但在高海况下,建模能力稍弱的检测器会出现不少漏检和虚警,降低检测精度,从而降低了分类的精度。另一方面,高海况情况下舰船像素集提取存在困难,为解译工作增加难度。第3个因素为舰船自身因素,包括舰船的材质、大小、位置等[25]。
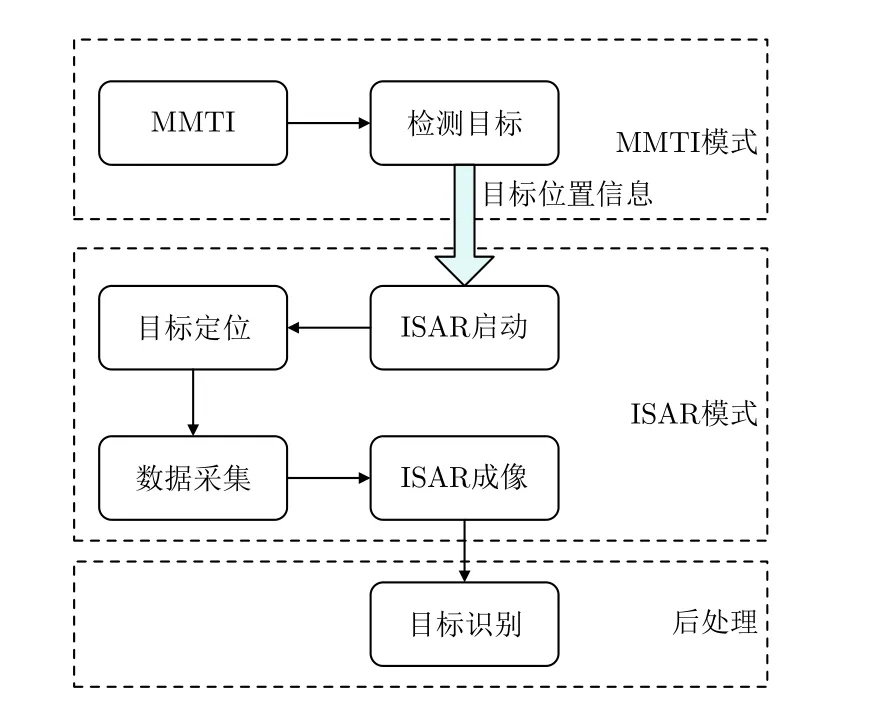
图17 ISAR模式工作流程示意框图Fig.17 Schematic block diagram of ISAR mode work flow chart

图18 某机载多功能海上监视雷达对海上某船ISAR成像结果Fig.18 ISAR imaging results of an airborne multifunctional marine surveillance radar for a ship at sea
根据上面对舰船分类识别影响因素的分析,设计高分辨率ISAR海洋舰船目标分类识别算法流程如图20所示。
(1) 舰船切片预处理
舰船切片预处理是舰船切片特征提取的前提,是特征提取精度准确性的关键所在。因此,舰船切片预处理对于高分辨率ISAR图像下舰船分类工作具有重要意义。高分辨率ISAR图像下,舰船切片预处理[25],包括ISAR图像定标、去旁瓣处理、阈值分割、主轴方向提取和最小外接矩形提取等5个主要步骤。
(2) 舰船切片特征提取
常用的包括以下5类特征:
(a) 尺度和形状特征,包括长度、宽度、长宽比、面积、周长、形状复杂度和质心等[26,27];
(b) 散射强度特征,包括散射均值、方差和最大值等[28,29];
(c) 纹理特征,包括孔洞比例[30]、分形数[31,32]和密度等[33];
(d) 矩估计特征,通常采用Hu矩估计等[34];
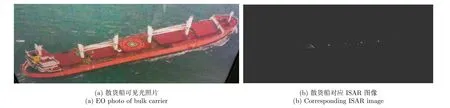
图19 某机载对海监视雷达对散货船ISAR成像结果Fig.19 ISAR imaging results of an airborne maritime surveillance radar on bulk carrier
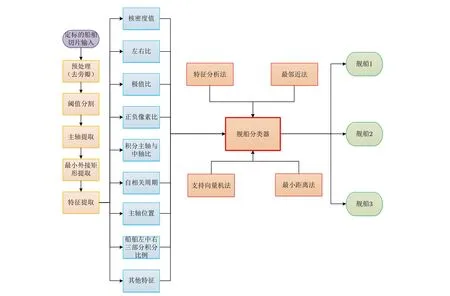
图20 舰船目标分类流程图Fig.20 Flow chart of ship target classification
(e) 其他特征,如SURF(Speeded Up Robust Features)特征[35]、RCS密度编码(RCS density encoding)[36]等。
以上特征是一般情况下ISAR图像中自动目标识别(Automatic Target Recognition, ATR)常用的特征,但针对舰船目标而言,同一艘舰船在不同的成像时间、海浪情况和不同的图像中,均存在一定差异。针对以上问题,提出以下结构特征作为舰船类型判别的依据,包括核密度估计值、左右比、极值比、正负像素、积分主轴与中轴比、自相关周期、主轴位置和船舶左中右积分比例等[34–37]。
(3) 舰船的分类模型
现常用的分类模型主要包括[38,39]层次阈值法、最小距离法(minimum distance classifier)、最邻近法(nearest neighbor algorithm)、最大似然法(Maximum Likelihood, ML)、贝叶斯神经网络法(Bayesian neural network)、支持向量机(Support Vector Machine, SVM)和基于深度学习卷积神经网络(Con-volutional Neural Network, CNN)的分类方法[40]等。
通过实验分析发现,上述方法分类方法各有优缺点。特征分析法综合分析比较了所有的船舶切片模型,适用于高分辨率ISAR图像的船舶分类识别工程应用。最小距离法和最邻近法具有较为直接的数学表达和较为简单的理解过程,实现难度小,稳定性较好。支持向量机法是近年来的研究热点与难点,能够综合分析样本量少,特征维度高的分类问题,具有较高的分类精度和稳定性,在4种方法中,取得最高的分类精度。
综上所述,ISAR图像舰船识别通过预处理提高图像的信噪比等以满足识别需求。ISAR图像舰船目标识别先通过图像检测的方法将目标检测出来,再进一步通过特征提取与优选、分类识别与数据库的建设完成对军船、民船、航母、驱护舰的分类识别。
5 未来发展趋势
虽然国内外机载多功能海上监视雷达已有长足的发展,但是针对海洋背景的复杂性和特殊性问题的不断探究,以及海面小目标检测迫切需求[1],使得该类产品在未来仍有很大发展空间。未来机载多功能海上监视雷达的发展趋势和要求主要有:
(1) 多功能、多任务
机载对海监视雷达为海军的反舰、反潜、登岛和登陆作战任务提供信息保障,不仅能提供目标位置、速度等常规的信息,而且要提供目标的特征,能对目标实施分类甚至识别,为精确打击提供指示信息,提高机载、舰载、岸基等武器作战效能,因此,未来机载多功能对海监视雷达需要具备搜索、跟踪、定位、高分辨成像、目标分类/识别、引导、评估等同时多功能和多任务能力。
(2) 复杂环境的作战能力
机载对海监视雷达的探测目标有海面舰船、潜艇潜望镜和通气孔、低空飞行目标(如低空直升机、掠海飞行的巡航弹等),岛屿、海岸线行驶车辆等目标,需要探测目标的RCS和速度范围跨度大,需要比单一功能雷达更大的动态范围。此外,雷达面临“四抗”的威胁,要对抗各种有源、无源干扰,要在复杂电磁环境中保持探测性能,还需要对抗海杂波、地杂波、气象杂波等环境杂波。
(3) 信息协同交互能力
体系对抗将是现代海军作战的主要特征,协同作战能力(Cooperative Engagement Capability,CEC)在未来海战中将越来越重要,信息协同交互能力是实现协同作战的基础和重要保障,包括支持CEC、各作战单元之间的高速数据链路、联合数据处理、分发和共享能力都显得不足。
(4) 海上环境适应能力
机载对海监视雷达面临海上高温、高湿、强盐雾和霉菌环境影响,对雷达“三防”设计和工艺提出了高要求;海面异常传播效应干扰了电磁波的正常传播,影响雷达的监视性能。海上使用环境要求机载多功能海上监视雷达必须有很高的可用度,包括可靠性、维修性和保障性等。
(5) 可靠高效的检测算法和目标分类识别能力
通过高海况复杂环境下的高性能海面目标检测方法,提高机载对海监视雷达的探测性能;不止停留在目标有无的判断层面,通过装备敌我识别设备对配合目标进行属性判别以及通过HRR和ISAR等方法对于非合作目标进行属性判别,提升雷达对目标分类识别的能力,是各厂商追求的卖点和未来发展方向。
(6) 雷达认知/智能化
利用人工智能技术,机载对海探测雷达能够连续不断感知、学习和适应战场环境,自主分析处理并作出正确的反应。此外,从基于射频微系统的数字阵列系统,到多功能共形,再到未来智能蒙皮化,机载多功能对海探测雷达系统的总体系统架构和软硬件技术形态将发生深刻变化[41]。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
红蜻蜓(2021年2期)2021-07-20
舰船科学技术(2021年12期)2021-03-29
雷达与对抗(2020年2期)2020-12-25
舰船电子对抗(2020年5期)2020-11-26
火控雷达技术(2020年2期)2020-10-16
小学科学(2020年6期)2020-06-22
雷达与对抗(2020年1期)2020-06-05
辽河(2019年7期)2019-09-03