测量不确定度分析方法在基坑水平位移监测中的应用
2019-07-05 09:51:52刘俊生卢金芳胡园园
城市勘测 2019年3期
刘俊生,卢金芳,胡园园
(南京市测绘勘察研究院股份有限公司,江苏 南京 210019)
1 引 言
依据《测量不确定度评定和表示》(GB/T 27418-2017),测量不确定度简称不确定度,是根据所获信息,表征赋予被测量值分散性的非负参数。而传统意义上,一般用测量误差表征测量结果的可靠程度,即:测量结果=真值+测量误差。但是,真值在很多工程应用上不能实际求得,所以用测量误差评价测量结果的质量存在一定的局限性,往往操作性和效率都较低。测量不确定度概念的提出,是误差理论的一大进步,目前已经在检测和校准领域广泛应用。
测量不确定度的评定步骤一般为,首先分析不确定度来源(识别不确定度来源,并对不确定度各个分量进行必要的预估)和建立测量模型,根据不确定度来源计算各分量的标准不确定度,然后依据建立的测量模型计算合成不确定度。
2 水平位移测量不确定度分析
在基坑监测项目中,水平位移测量的精度和准确性对基坑支护体系的综合判断起着至关重要的作用,常用的水平位移监测方法有极坐标法、小角度法、视准线法、前方交会法、投点法等。由于场地条件、操作便利性等的限制,目前使用最为广泛的水平位移观测方法为极坐标法(测定任意方向水平位移)和小角度法(测定特定方向水平位移)。以下分别就极坐标法和小角度法进行水平位移监测的测量不确定度进行分析。
2.1 极坐标法测量不确定度分析
极坐标法是在控制点(或工作基点)上测设一个角度和一段距离来确定点的平面位置(即纵横坐标)。基坑监测项目中,测点分布不是呈规则的直线状分布时,一般选用极坐标法测定水平位移。
(1)分析不确定度来源、建立测量模型
极坐标法主要的工作内容是距离测量和角度测量,通过距离和角度计算出监测点位的纵横坐标值,从而求得监测点的水平位移变化量。极坐标法测量水平位移的不确定度主要来源于全站仪的距离测量和角度测量的误差、仪器的对中误差、测点的对中误差、外界环境的影响等方面。
为便于分析,假定两次测量的仪器对中误差、测点对中误差和外界环境均相同(仪器采用观测墩强制对中,测点采用固定式的小棱镜可最大限度减小人为对中的影响)。由此可得,极坐标法测量水平位移的测量模型为:
位移分量X、Y方向计算公式分别为:△x=Xi-X0,△y=Yi-Y0
其中,Xi=Xp+Sicosαi,Yi=Yp+Sisinαi,X0=Xp+S0cosα0,Y0=Yp+S0sinα0
式中,Xi—本次纵坐标观测值;Yi—本次横坐标观测值;X0/Y0—纵/横坐标观测初始值;Xp/Yp—工作基点纵/横坐标观测值(已知);Si—本次水平距离观测值;αi—本次方位角观测值;S0—初次(上次)水平距离观测值;α0—初次(上次)方位角观测值。
故△x=Sicosαi-S0cosα0,△y=Sisinαi-S0sinα0。
(2)评定标准不确定度
各分量标准不确定度的评定主要依据仪器设备的检定结果,故采用B类评定。其计算公式如下:
(3)计算合成不确定度
由于角度和距离的输入量(Si、αi、S0、α0)均不相关,位移值的合成不确定度按以下公式计算:
代入位移计算公式,得到:
可分别求得X、Y方向的合成不确定度uC(△x)、uC(△y),再由uC(△x)、uC(△y)求得位移量的合成不确定度uC(△s),即:
(4)算例
某基坑工程采用极坐标法观测4个水平位移测点(S1、S2、S3、S4),监测点布置示意图如图1所示。
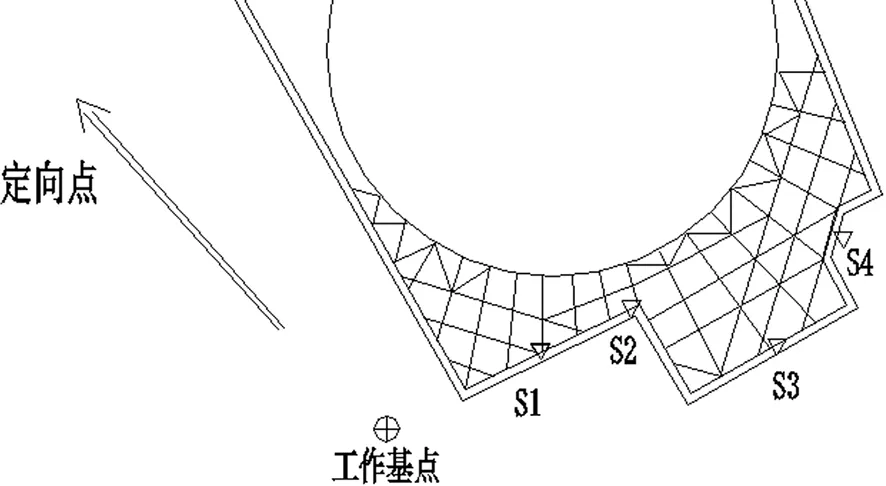
图1 某基坑工程监测点布置示意图(极坐标法观测)
观测使用某品牌1″全站仪(测距精度:2+2 ppm×S mm,测角精度:1″,经鉴定合格),按二等变形测量要求施测,观测数据如表1所示:
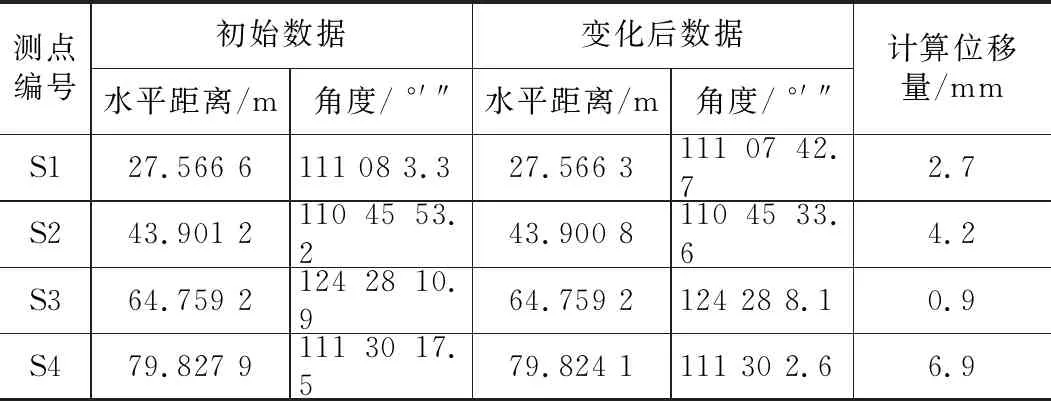
极坐标法观测数据汇总表 表1
标准不确定度、合成不确定度计算结果如表2所示:
极坐标法不确定度分析结果汇总表 表2
2.2 小角度法测量不确定度分析
小角度法又称小角法,是水平位移监测中常用的方法,通过测定基准线方向与观测点的视线方向之间的微小角度从而计算观测点相对于基准线的偏离值。基坑监测项目中,测点分布呈规则的直线状分布时,一般选用小角度法测定水平位移。
(1)分析不确定度来源、建立测量模型
小角法是测定特定方向上(一般为垂直于基坑边的方向)位移时常用的一种极为便捷和有效的观测方法,其主要的工作内容是在工作基点上架设全站仪(或经纬仪)测定监测点与方向点之间的微小夹角,而工作基点与监测点之间的距离则被认为是固定值,通过测定夹角的变化求得监测点的水平位移变化量。小角法测量水平位移的不确定度主要来源于全站仪的角度测量的误差、距离测量的误差、仪器的对中误差、测点的对中误差、外界环境的影响等方面。
与极坐标法不确定度分析类似,我们假定两次测量的仪器对中误差、测点对中误差和外界环境均相同(仪器采用观测墩强制对中,测点采用固定式的小棱镜可最大限度减小人为对中的影响)。由此可得,小角法测量水平位移的测量模型为:
式中,βi—角度观测值;β0—角度初始值;ρ—换算常数(206265);S—水平距离观测值。
(2)评定标准不确定度
各分量标准不确定度的评定主要依据仪器设备的检定结果,故采用B类评定。其计算公式如下:
(3)计算合成不确定度
由于角度和距离的输入量(αi、α0、S)均不相关,位移值的合成不确定度按以下公式计算:
代入位移计算公式,得到:
可求得合成不确定度uC(y)。
(4)算例
某基坑工程采用极坐标法观测4个水平位移测点(D1、D2、D3、D4),监测点布置示意图如图2所示。
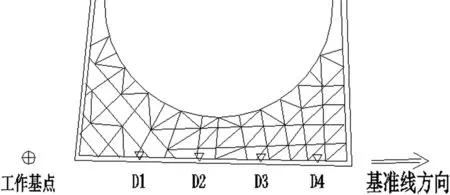
图2 某基坑工程监测点布置示意图(小角法观测)
观测使用某品牌1″全站仪(测距精度:2+2 ppm×S mm,测角精度:1″,经鉴定合格),按二等变形测量要求施测,观测数据如表3所示:
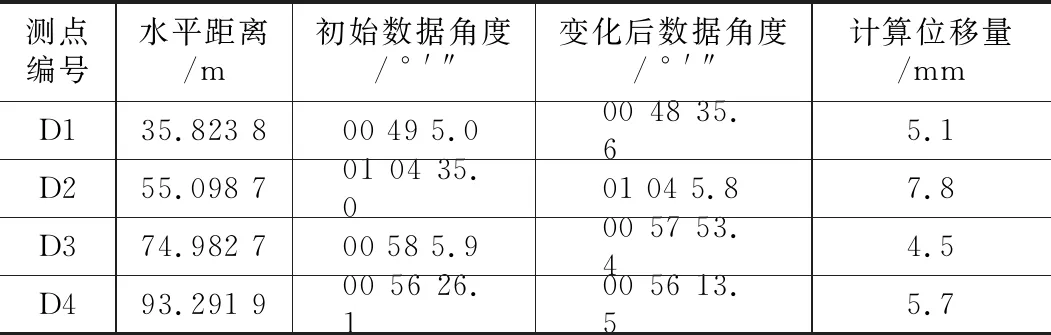
小角度法观测数据汇总表 表3
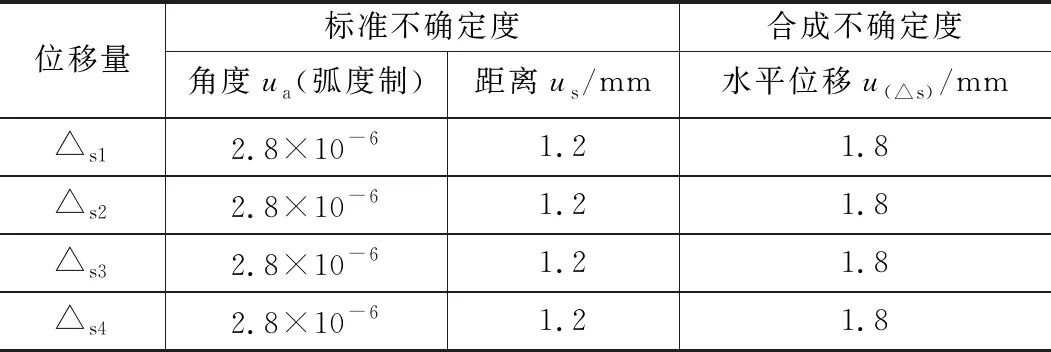
标准不确定度、合成不确定度计算结果如表4所示:
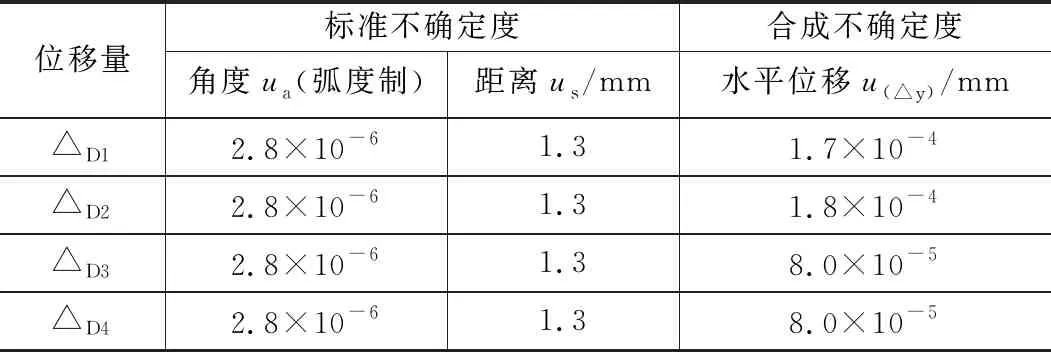
小角度法不确定度分析结果汇总表 表4
由此可见,当忽略仪器对中误差和测点对中误差,仅考虑观测角度和距离产生的误差时,采用小角度法进行水平位移监测,不确定度大幅降低。此时,仪器和测点的对中误差由次要影响源变为主要影响源。
(5)小角法测量不确定度来源再次分析
分别从测量仪器、测量环境、测量人员、测量方法等方面综合分析,小角法水平位移测量不确定度分量来源如下:
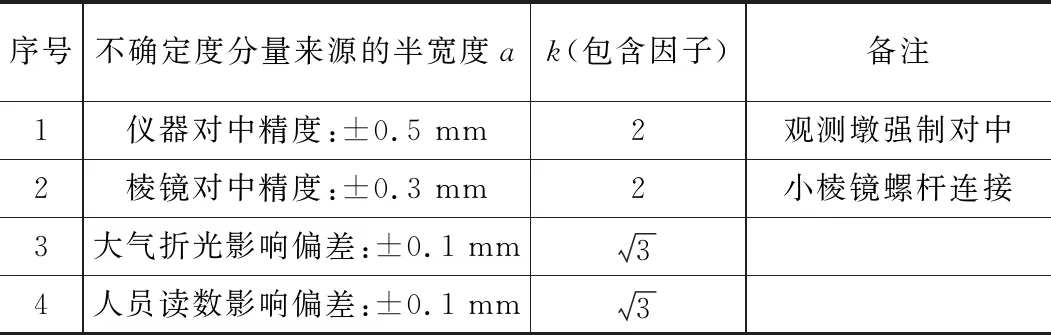
小角度法测量不确定度来源一览表 表5
各分量的标准不确定度采用有关信息和经验值,故采用B类评定。
按以下公式计算合成不确定度 :
求得,水平位移不确定度u(△y)=0.3 mm
3 结 论
(1)不确定度分析结果的合理性
由上文中的两个工程实例可以得出,采用1″全站仪进行水平位移观测时,其合成不确定度可以优于 2.0 mm。从另一方面也验证了,采用不确定度分析测量结果,与《建筑变形测量规范》相关规范中对位移监测精度的要求是相匹配的。
(2)极坐标法和小角度法测量水平位移的精度比较
长期以来,关于极坐标法和小角度法的精度分析有两种声音,一种认为极坐标法的精度可等同于小角度法,其设站和布点要求更为便捷,极坐标法更为优越;另一种认为小角度法精度明显优于极坐标法,尤其是在二等及以上精密工程测量时应优先采用极坐标法。通过两种方法的不确定度分析和对比,我们可以清晰地看到,如果不考虑仪器和测点的对中误差,小角度法观测的精度会大幅提高;而综合考虑各种对中误差及人为观测影响下,小角度法的观测精度也会略优于极坐标法。故本文建议在进行基坑工程水平位移监测时,应优先考虑小角度法,另外,无论是小角度法还是极坐标法,在进行二等及以上精密测量时都应采用强制对中观测墩。
4 结 语
测量不确定度是现代误差理论的重要内容,其在测量结果的精度分析中已经显示出一定的科学性和合理性,对于不同来源的分量都可以采用相同的方法进行分析,其操作性较强;另外,在实验室认可、内部质量控制方面,测量不确定度也发挥着越来越重要的作用。随着对测量不确定度的深入研究,其应用领域也会越来越为广泛。
猜你喜欢
机械设计与制造(2023年2期)2023-02-27 12:40:16
煤气与热力(2022年4期)2022-05-23 12:44:56
水利水电科技进展(2021年6期)2022-01-07 02:58:02
汽车实用技术(2021年10期)2021-06-04 07:51:00
河北理科教学研究(2020年1期)2020-07-24 08:14:26
水电站设计(2020年4期)2020-07-16 08:23:48
中学数学研究(广东)(2018年23期)2018-03-05 07:54:34
高中生·天天向上(2016年8期)2016-11-22 09:22:46
湖南畜牧兽医(2016年3期)2016-06-05 08:37:55
水利水电科技进展(2014年1期)2014-10-17 02:29:14