基于北斗卫星导航系统的自动放样小车设计
2019-07-05 09:41:44冯佳琪陶庭叶贺晗房兴博
城市勘测 2019年3期
冯佳琪,陶庭叶,贺晗,房兴博
(合肥工业大学 土木与水利工程学院,安徽 合肥 230009)
1 引 言
北斗卫星导航系统是我国着眼于国家安全和经济社会发展需要,自主建设、独立运行的卫星导航系统,可以为亚太地区乃至全球提供全天候、全天时、高精度的定位、导航等服务。目前,北斗系统相关产品已经成功应用于交通运输、测绘地理信息等领域,正逐步渗透于社会生产和人们生活的方方面面,由此可见,将北斗系统与传统行业相结合,进行传统技术革新会成为未来发展的趋势之一[1]。
随着我国经济水平飞速发展,基础设施需求量日益增加,优化放样技术、创造智能化放样工具有着重要的现实意义和广阔的应用前景。目前施工放样领域所应用的技术,多为依靠施工员重复操作的低效率人工测量[2,3],并且由于人员无法在高温大雨等环境下工作,无法保证施工周期。除此之外,还有BIM(Building Information Modeling,建筑信息模型)技术结合测量机器人的方法[4,5],该方法需要绘制建筑物三维模型,测量机器人才可进行放样,对技术要求高,前期准备工作复杂,工作现场也需要至少一名施工员配合仪器工作,即无法实现完全的自动化放样,也不利于向市场大面积推广。为弥补现有放样技术的不足,本文设计了一款高效率、低成本、易操作的自动放样小车,其基于北斗卫星定位系统,结合串口转WiFi的通讯技术,控制技术、手机APP开发技术等,可以由APP远程遥控移动,控制运动轨迹,自动到达放样点坐标而后根据指令进行打点。全放样过程仅需一人将放样点坐标导入APP并在远处通过手机监管,所有工作都可由小车独立完成。
本文从设计思路、软硬件设计和适用工程三个角度阐述自动放样小车的核心特点与优越性。
2 设计思路及方案
自动放样小车的设计核心是获取基准站通过电台模式播发出的差分信号,确定移动中小车的实时位置[6],根据其三维坐标与待放样点三维坐标之差,控制小车移动相应距离,直到小车坐标与放样点坐标在误差范围内重合(即小车到达放样点)。
详细设计方案为:设计能够360°自由旋转并移动的小车,其上搭载北斗卫星接收机及定位模块和搭载打点工具,而后借助WiFi信号将模块解算出的小车坐标(精度为 1 cm~2 cm[7])传输至通过Java语言和Android平台开发的移动端APP,并由APP的数据处理程序计算出放样点和小车当前坐标的差值,移动驱动程序根据差值控制小车自动前进相应距离,并随着小车实时位置不断改变修正距离值,直至达到放样点,由标记驱动程序控制打点工具标记地面完成放样。
考虑到监管需要,设计将小车实时位置和放样点坐标显示在移动端屏幕上,并设计手动操控小车移动、打点功能作为自动模式的补充和辅助。
3 系统设计
3.1 硬件系统设计
根据自动放样小车的设计思路及详细方案,采用车身、北斗接收机、北斗卫星定位模块、串口转WiFi模块、驱动模块、电源等设备组成硬件系统,其整体系统框架及实物如图1、图2所示:
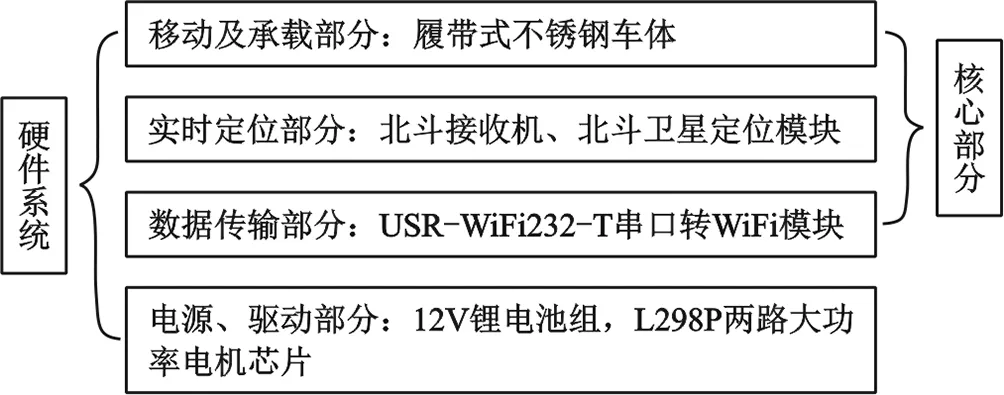
图1 硬件系统概况
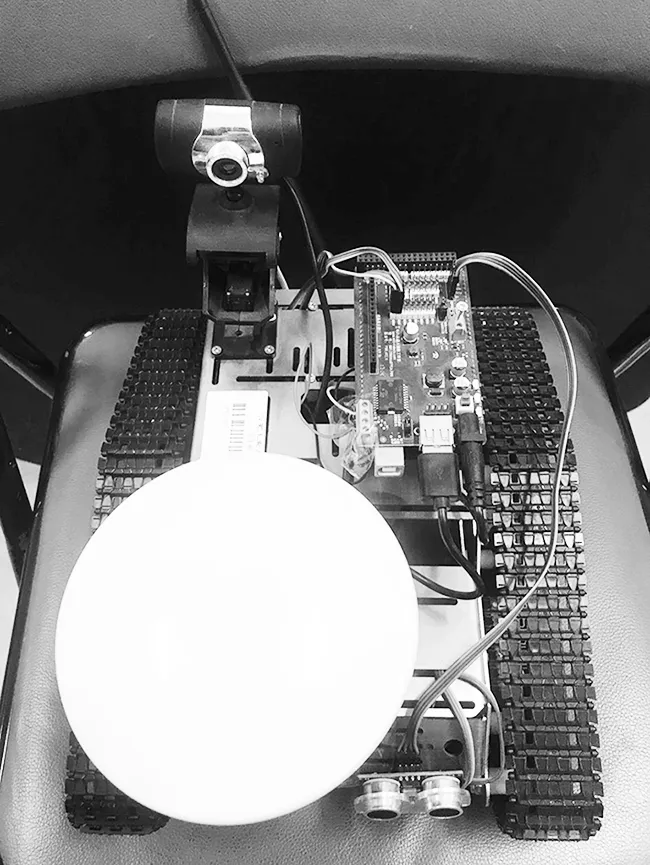
图2 硬件实物图
(1)履带式不锈钢车体
小车选取履带式车轮,配合可360°旋转的底盘,能够采取坦克式姿态向各个方向移动。相较于传统圆形车轮,履带式车轮不仅大大提升了小车旋转的灵活性,更能稳定翻越场地上的低矮障碍物,履带可以均匀分散车体承重,最大限度地防止车轮磨损不均导致小车故障的情况出现。车身采取不锈钢材质则能够在降低小车自重的情况下保持车身硬度,加大承载力以搭载北斗接收机(置于车身顶部)、打点标记装置(置于车身底部)等设备。
(2)北斗接收机及定位模块
北斗接收机采用司南AT300型号接收机,该接收机体积小重量轻,能够稳定安置在车身顶部,具有抗震、防水、耐热等特点,可以满足任何气候下稳定作业的设计要求。北斗定位模块采用司南K726型号GNSS板卡,除GPS信号外,它可以支持北斗全球信号,获取高质量B1、B2双频观测数据。通过基准站播发的差分信号组建双差观测模型,小车能够实现1-2厘米的动态定位精度。二者构成小车实时定位部分,保证了小车能够在极寒极热、不断运动的条件下获取高质量的北斗卫星观测数据和厘米级的实时坐标。
(3)串口转WiFi模块
因为自动放样小车的关键在于实时控制和定位,所以稳定、快速地进行数据通讯是重中之重。考虑到4G信号具有一定程度的数据延迟,蓝牙技术不适用于中远距离通讯,因此选择WiFi技术进行百米级距离实时数据传输。
小车采用USR-WiFi232-T模块,它是基于Uart接口的符合WiFi无线网络标准的嵌入式模块,能够实现串口数据到无线网络之间的转换,通过该模块,可以迅速将北斗实时定位数据传输至手机APP中[8],并获取APP发出的移动指令。
3.2 软件系统设计
本文设计的控制APP基于Android平台使用Java语言进行编写,用户可以直接使用自己的Android移动设备如手机、平板等,下载APP并进行操作,无须其他专业测量设备。相较于传统测量工作中的智能手簿,此软件可以有效节省测量成本[9],当有特殊的工作需要时,更便于二次开发以拓展小车的应用场合。
该软件能将小车实时位置和放样点位置在移动端屏幕上显示出来,并可操纵小车进行多种动作(如移动、打点等),其程序主要由四部分组成:数据导入程序;数据处理程序;移动驱动程序;标记驱动程序,另有如通过摄像头进行周围观察等辅助程序。整体软件框架和整体控制界面设计图如图3所示:

图3 软件设计框架
(1)数据导入程序
程序包括放样点坐标导入和地图包导入两部分。放样点坐标导入是将需要放样的点的三维坐标输入到软件后台,既可以选择手动添加单个放样点,也可以选择将多个点编写为Text文档,整体导入APP进行自动读取。待读取完毕后,坐标点会显示在应用界面上,其中,尚未进行放样的坐标点显示为红色,已完成坐标点显示为绿色。地图包导入是指,当存在施工场地由ArcGIS做好的离线地图包时,将其导入APP,屏幕上会显示一定范围的标志物、道路等,若施工场地不需要或没有地图包时,则无须导入,APP放样工作界面会出现栅格代替地图。
(2)数据处理程序
因为小车使用的定位模块K726解算出的坐标结果为WGS84坐标系下的,而实际工程往往会采用施工坐标系,因此,为了将放样点坐标和小车自身坐标统一,在北斗定位模块将小车实时位置等信息以NMEA-0183格式传输至手机后,判断信息的有效性并设计编写数据处理程序将WGS84坐标系下的坐标转换至施工坐标系,而后计算出当前小车坐标与放样点坐标之间的差值并反馈给移动驱动程序。
(3)移动驱动程序
小车移动方式被设计为自动控制及手动控制两种。自动控制是开启界面自动移动开关后,小车无须人工干预,自行移动至目的地。手动控制则是操作人员关闭自动移动开关,通过方向键操纵小车。
(4)标记驱动程序
与移动驱动程序类似,分为自动标记和手动标记两种。自动标记为软件判断小车准确到达放样点后,自动使用搭载的标记工具对地面进行打点标记,视为完成放样工作。手动标记即为由操作员按下软件的打点按钮,控制小车打点。
4 成果与应用
自动放样小车的最终目的是在满足施工精度要求的前提下,结合北斗卫星导航系统简单、快速、安全地完成施工放样。在实际应用中,小车的GNSS板卡被设置为同时接收GPS的L1、L2和BDS的B1、B2载波相位观测值,通过接收基站播发出来的差分信号,建立双模双频双差方程进行定位,并在完成初始化后向APP实时发送NMEA-0183格式数据[10,11],如定位信息(GGA)、卫星状态信息(GSV)等。APP数据处理程序根据转码而得的定位状态、坐标等信息进行判断,仅当报文返回的解状态为固定解且有效的情况下,将坐标结果转换至指定坐标系下且仅保留平面坐标,在计算距放样点的坐标向量后,由控制程序进行移动。一旦返回的解状态为非固定解或无效解,则停止运动直到返回具有固定解的坐标,若10s内都无法返回固定解,则重新初始化。当小车的位置移动至放样点位置5cm内时减速移动,直至放样点并行打点。
本文设计的APP控制软件采用简洁明了的主界面(如图4所示),以方便人员操作与获取信息。由该界面可以清楚地获知,小车采用自动控制模式(on键开启)工作,1、2号点放样完成(已变为绿色),3、4、5号点尚未放样(仍为红色),小车正向3号点移动等信息。
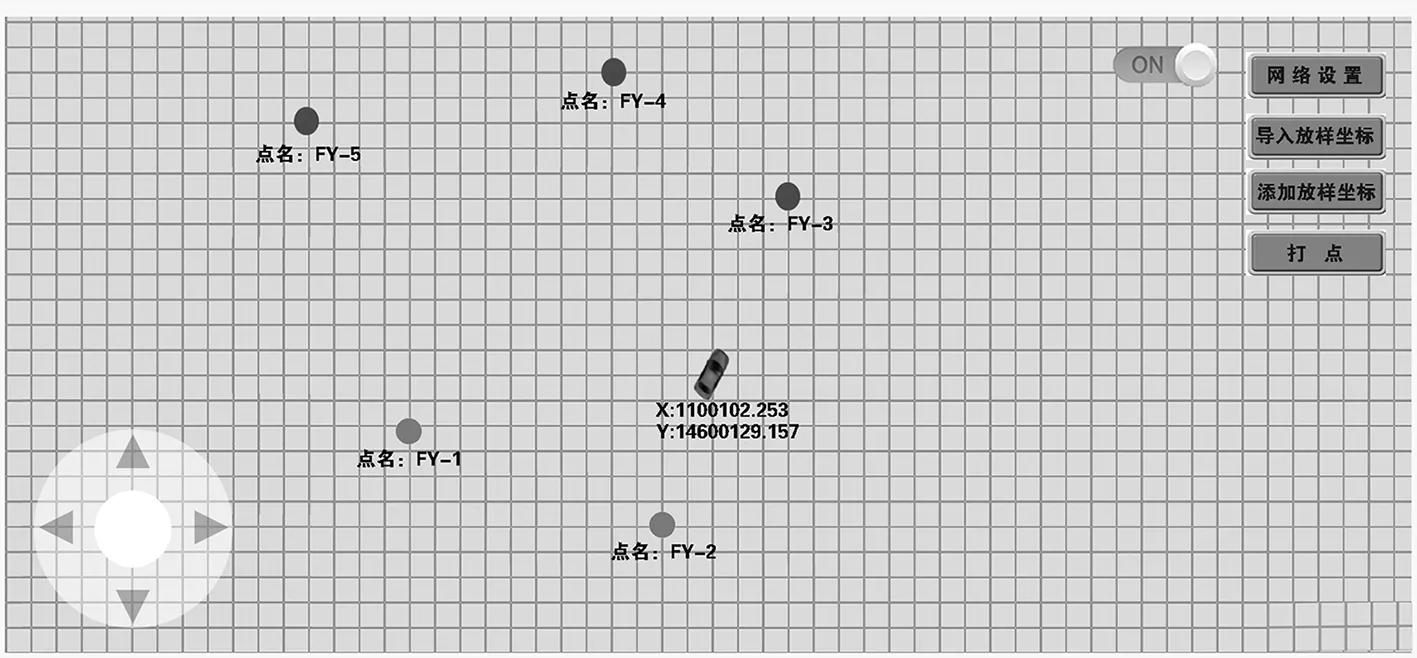
图4自动放样小车APP主界面
为验证自动放样小车的放样精度,证明小车在施工放样领域的适用性,本文采用小车先将点位放样出来,再用全站仪精确测量坐标的方式计算放样误差。由于全站仪精度达到毫米级,用于检核精度具有足够的可靠性。以图4中的5个放样点为例,自动放样小车的放样误差如表1所示:
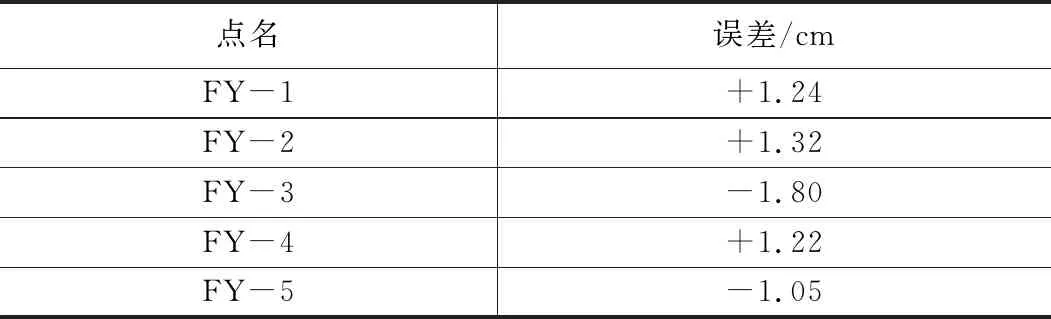
小车放样误差 表1
根据工程测量规范,普通混凝土结构工程,即目前建设领域的主要组成部分之一,放样精度控制标准[12]如表2所示:
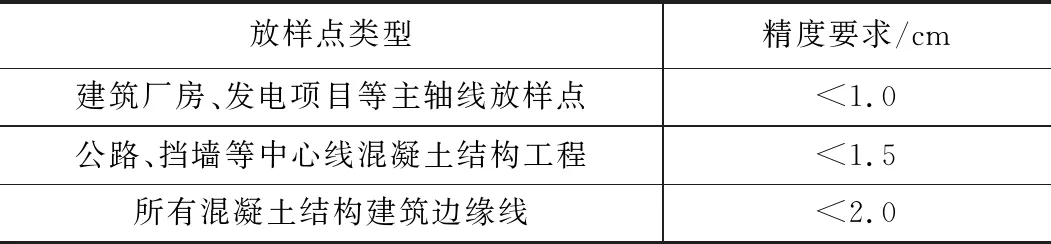
放样精度控制标准 表2
分析两表可以发现,自动放样小车的放样精度可达到 1 cm~2 cm,能满足所有混凝土结构建筑边缘线的施工要求;对于公路、挡墙等工程,由于仅有3号点误差 >1.5 cm,预计小车可以通过适当降低行驶速度、在行驶过程中增加暂停次数、计算坐标均值[13]而提高定位精度,进而提高放样精度,最终满足该类工程。但是对于主轴线放样点,小车尚无法达到其精度要求,未来将通过升级定位模块、改进定位算法来达到 1 cm内的放样精度。
5 总 结
本文设计了一款基于北斗卫星导航系统的自动放样小车,结合卫星定位技术、WiFi数据传输技术、Android软件开发技术等,具有 1 cm~2 cm的放样精度,能满足如边缘线等大量放样点的精度要求。工作过程中仅需一人将放样点坐标导入至控制软件并处于WiFi信号范围内,便可完成施工放样,避免了现有放样方法依靠人工进行操作而产生的诸多弊端。未来的研究中,将在已有设备和相关实验结果的基础上,继续完善小车软硬件系统,进一步提高小车移动稳定性和放样精度,使自动放样小车可以适用于更多建筑工程。
猜你喜欢
湖北植保(2022年4期)2022-08-23 10:51:52
土壤(2021年1期)2021-03-23 07:29:06
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
土壤学报(2017年5期)2017-11-01 09:21:27
地域研究与开发(2012年5期)2012-06-03 04:19:54
计算机应用文摘(2009年6期)2009-04-29 15:00:36
计算机应用文摘(2009年1期)2009-04-29 07:38:36