机非物理隔离路段非机动车行为建模仿真
2019-07-04 06:46:36李逸昕李旭红
同济大学学报(自然科学版) 2019年6期
倪 颖, 李逸昕, 李旭红, 孙 剑
(1. 同济大学 道路与交通工程教育部重点实验室, 上海 201804; 2. 杭州海康威视数字技术股份有限公司, 上海 201203)
非机动车作为一种健康环保的出行工具[1],近年来在世界范围内受到了广泛关注[2].我国的非机动车多由电动自行车及人力自行车共同构成,例如在上海市,两者的比例约为3:1[3],因此异质性是非机动车流的主要特点之一.除了动力性能存在差异[4],两类非机动车在行为特征上同样具有许多区别[5].实证数据表明,电动车骑行者的行为往往更加激进,这样的特点也在一些具体的行为研究中得以证实[6-7].异质非机动车流与单一类型非机动车流的宏观特征不同[7],并对道路通行能力产生了深刻的影响[5].同时,随着交通密度的动态变化,相邻非机动车间的横纵向间距还会呈现明显的可压缩特性[8].这些特征会给对非机动车交通流的建模研究带来极大的挑战.
如何建立能够描述个体在二维平面上运动的二维模型是微观行为建模的又一难题[9].与机动车基于车道的运动不同,非机动车的运动在二维平面上自由度高,且没有明确的车道规则,在运动时多个交通个体间将同时交互.这样的特点会给在复杂交通环境中模拟非机动车运动带来很多困难.此外,非机动车行为本质上是骑行者根据周围环境因素而产生行为动机、进行决策和执行的过程,因此若能够从行为产生的角度来模拟非机动车运动,将有助于解释非机动车复杂交互行为特征及其机理.
因此,建立一种既能够体现非机动车流特性,又能够反映行为从动机产生,到决策执行全过程的微观二维非机动车交通流模型,对于精细刻画非机动车交通流微观特征、丰富非机动车流建模方法等方面都具有重要意义.
本文将针对机非物理隔离路段异质非机动车流建模.首先,从骑行心理角度出发,首次提出舒适空间理论来解释非机动车行为动机产生的原因;其次,基于舒适空间理论,构建动机-决策-执行三层框架模型,模拟异质非机动车行为从动机的产生、决策直至执行的全过程;最后,利用数值仿真软件搭建异质非机动车交通流仿真平台,选择合适的微观评价指标与实证数据以及现有模型进行对比,以验证模型的有效性.
1 研究综述
在之前的研究中,主要有三类模型被广泛应用于非机动车交通流建模研究,包括基于车道的模型、元胞自动机模型(cellular automata, CA)和社会力模型.
第一类是基于车道的模型.基于车道的模型将机动车行为的研究方法迁移至非机动车领域,并被广泛使用于商业交通仿真软件.该类模型将非机动车道人为地划分为若干虚拟车道,将非机动车的运动分解为纵向的跟车行为和横向的换道行为,并使用跟驰模型和离散选择模型分别控制.为尽可能在二维平面上描述非机动车的运动,此类模型聚焦于虚拟车道宽度的选取[10-11].这类模型的优点在于明确了车辆间交互关系,能够再现非机动车流宏观特征.然而,从行为角度说,此类模型弱化了自由度的概念,通过解耦二维平面的运动,弱化了个体行为动机的产生及运动轨迹的二维特征,对交互过程的描述并不充分[12].从车辆特性角度说,此类模型将非机动车看作小型机动车,忽略了非机动车流特有的属性,对于精细刻画非机动车流微观特征存在很大不足.
第二类方法是元胞自动机模型(CA).通常,CA从时间和空间上将车辆运动离散化在大小有限的网格中,并赋予不同的演化规则来模拟车辆运动[13].CA在对非机动车流的建模中,一类基于Nagel等人提出的运动模型[14],具体描述了非机动车之间的交互.如Zhang等[8]提出一种改进的换道规则来模拟混合非机动车流的运动;Zhao等[15]、Shan等[16]则以CA模型为基础探究了非机动车的超车行为特征.另一类则基于伯格斯方程,具体表征了非机动车流的无车道特性.如Jia等[17]通过引入快慢车概念,区分了不同骑行者的最大骑行速度;Jin等[18]考虑自行车和电动车的动力性能差异,对模型中的最大速度限制进行了拓展.虽然CA模型在运算效率上具有明显的优势[19],并且能够重现许多交通现象[20],但其对于车辆微观行为的描述并不理想[21].从车辆运动角度来讲,虽然能够实现车辆的横向运动,但严格上说,CA仍是一维模型[9];从车辆交互的角度看,虽然交互规则十分灵活,但其假设所有个体遵循相同的运动规则.一些研究虽然区分了异质非机动车的速度差异,但仍然难以考虑两类非机动车行为层面上的异质性特征.
第三类是社会力模型.Helbing等人首先针对行人运动提出了社会力模型[22].该模型根据郎之万运动学方程来定量计算交通个体间的相互影响.交通个体则根据所受力的大小及方向来决定在二维平面上如何运动.近年来一些学者尝试使用社会力模型来对非机动车流建模.如Li等将骑行者的运动视为前向驱动力、车辆间排斥力以及道路边缘约束力共同作用的结果[23].但由于带有复杂决策过程的交通场景超出了其模拟范围,因此一些研究通过加入碰撞避免机制来进行补充.如Schonauer等[24]在社会力模型的框架下,通过引导场和博弈论来保证车辆安全行驶;梁肖[12]则通过引入短程心理生理力,避免了在高密度环境中,社会力模型的碰撞问题.从车辆运动的角度看,此类模型属于二维运动模型,这为描述非机动车机动灵活、轨迹多样的运动特点奠定基础.但车辆间的交互机制属于刺激-反应机制,缺少主动的行为动机和决策过程;同时,此类模型仍需要进一步确定不同车辆对周围交通个体所产生的影响的差异.除此之外,社会力模型参数过多,这导致模型标定非常复杂,不利于模型的实际应用.
综上所述,目前仍然缺乏能够较好表征非机动车交通流微观特征的模型.同时,现有模型还缺乏对非机动车行为产生过程的描述.因此,亟需提出一种能够精细刻画非机动车运动特征,并反映行为产生全过程的二维微观非机动车交通流模型.
2 模型的建立
2.1 舒适空间理论基本思想
舒适是对自身所处环境在安全,效率等方面的评价,此时骑行者在心理和身体两个层面都处于放松的状态[25].从社会规范角度讲,出行者有三种不同的心理空间:私人空间、个人空间和社会空间[26].其中,社会空间是指在公众场合下,根据环境情况而与周围物体维持的距离,其大小则因具体场合及个人属性而有所差异.
交通出行所需的空间属于社会空间层面.对非机动车而言,骑行者会从周围环境中感受到来自其他客体的影响(本文称骑行压力).当产生不适感时,骑行者将相应地做出反应来缓解或改善,而不适感的临界状态即为社会空间的边界[27].
因此,骑行者在骑行过程中将骑行压力维持在一定水平下所需的空间即为舒适空间.舒适空间的本质是表征骑行者对周围环境中骑行压力的感知程度.舒适空间的大小则与骑行者的速度、车辆类型、周围交通环境(流量、密度、道路环境等)以及社会规范(如交通规则)等密切相关,并且会随着上述因素的改变而动态变化[28].因此,舒适空间的函数表达式如下:
Ω=φ(V、P、A、N)
式中:Ω代表舒适空间的边界;V表示速度;P表示环境;A表示车辆属性;N表示社会规范.
Lewin认为,个体行为的表现取决于个人与所在环境间的相互作用[29].对非机动车骑行者而言,若当前的舒适空间受到侵犯,骑行压力将随之增大从而感到不适.此时骑行者需要通过调整自身相对位置来追求更加舒适的骑行,超车或跟车等行为随之产生.当然,若周围环境无法满足调整的需求,骑行者则将转而改变自身速度以减轻这种不适感,这便是非机动车采取各种行为的动机来源.因此,舒适空间和行为动机之间存在直接的内在联系,而舒适空间的内涵则具体阐述了行为动机的产生原因,即骑行者行为动机的变化是心理状态受环境影响的外在体现.
骑行压力是环境中其他交通参与者对骑行者行为影响的具体表现,也是舒适空间与行为动机之间的纽带.因此,其大小也与自身速度、车辆属性以及位置关系(距离、角度)等因素密切相关.当自身速度增大时,骑行者所面临的骑行压力随之增大;条件相同时,距离越近的个体所带来的压力越大,正前方车辆的影响则大于侧方,且随两者连线与本车前进方向夹角的增大而逐渐降低.因此,本文借鉴Horowitz等[30]的研究成果,同时考虑到各向异性的影响,假设舒适空间的形状为一个椭圆,骑行者处于椭圆的一个焦点处,如图1所示.具体的量化方式则将在下一节中给出.
根据骑行压力的大小,骑行者产生不同的行为动机,因而骑行压力阈值是区分不同动机的关键.根据不同阈值,可将舒适空间划分成若干虚拟区域,不同区域则对应不同的行为动机(如图2所示).同时舒适空间的大小随交通流和自身状态动态变化,并且不同类型车辆的舒适空间大小不同,这可以分别表征非机动车流的压缩特征和行为层面的异质性.
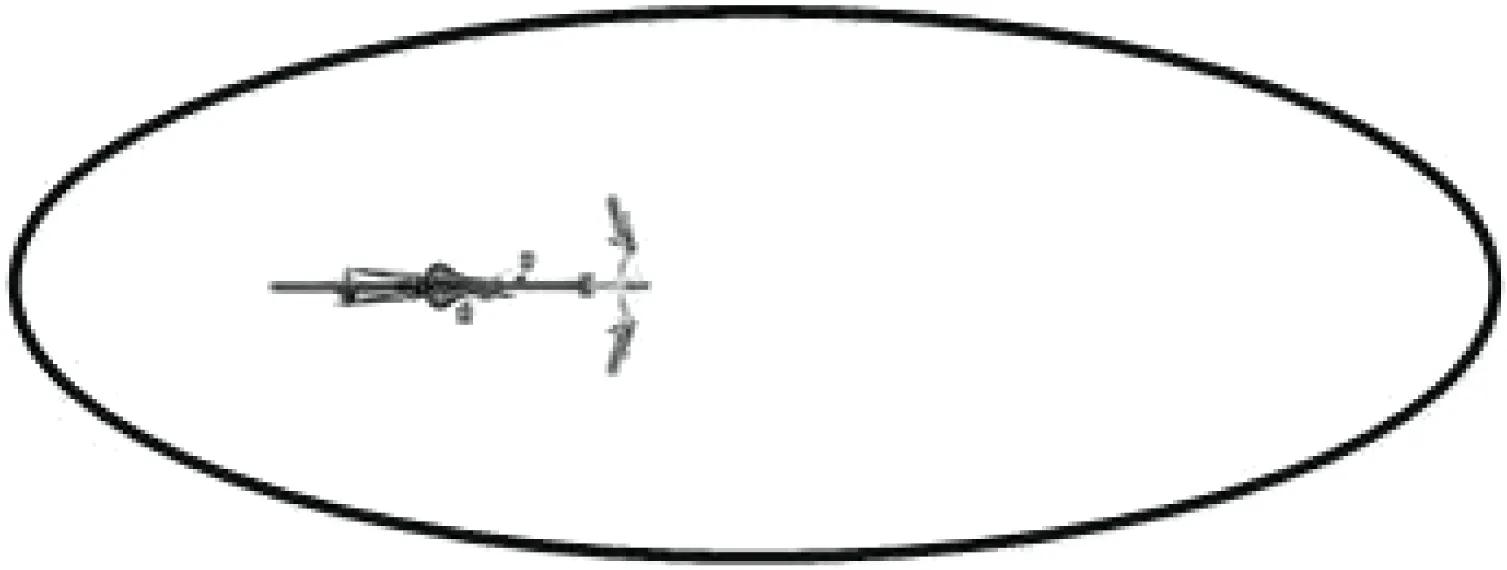
图1 舒适空间形状
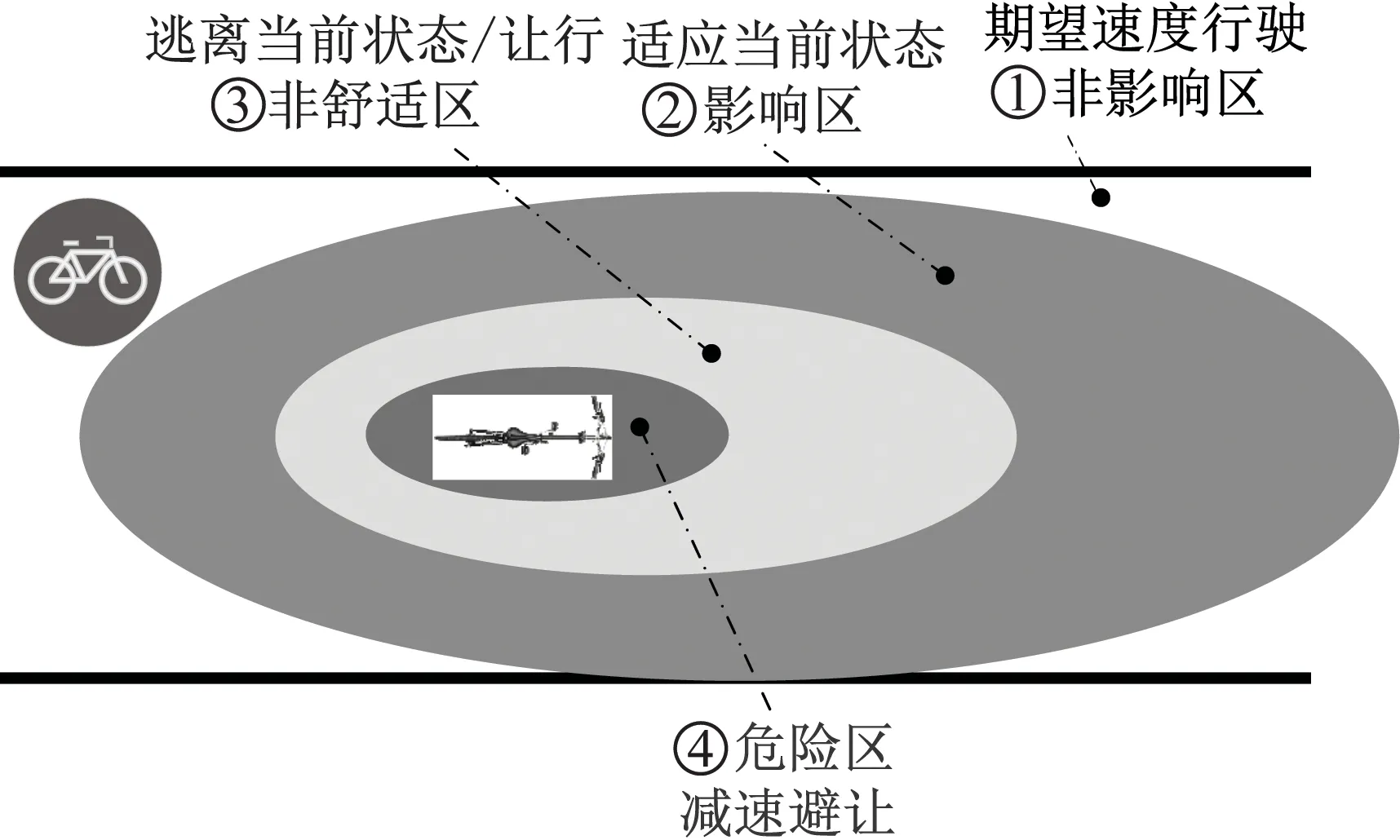
图2 舒适空间划分
2.2 动机生成-行为决策-动作执行模型
骑行者的行为过程可以概括为:骑行者感知骑行压力,产生行为动机;在行为动机的指导下,根据周围环境决策,确定合适的行为动作;最后,完成动作的执行.因此,本文提出考虑动机生成-行为决策-动作执行(motivation-decision-operation)的三层框架模型,简称MDO模型.模型基于舒适空间理论识别行为动机,并对车辆异质性和压缩特性加以考虑;其次,利用规则理性选择行为决策;最后,基于力驱动的思想实现在二维平面上的运动.
2.2.1动机层
根据受到的骑行压力大小,骑行者将产生相应的行为动机.因此骑行压力的计算是量化舒适空间的关键.骑行压力的大小一方面受到骑行者自身状态和骑行环境的影响,另一方面又由环境中的其他客体属性所决定.因此,骑行压力的计算方式如下:
Fn=En·G
(1)
式中:Fn是目标车辆所受骑行压力的大小;En为骑行者自身对环境中各个位置的感知程度;G为客体车辆的属性.
骑行者对于周围环境中各个位置的感知程度,可以认为和其与骑行者的相对位置密切相关.当该位置客体和骑行者的连线与骑行者行驶方向的夹角不变时,距离越近,骑行者对于该客体的感知程度越明显;而距离相同时,该夹角越大,感知程度也越低.同时,感知程度的强弱又与骑行者自身的速度正相关,与交通密度负相关.因此,En的计算公式如下:
(2)
式中:vn为目标车辆速度;k为周边交通密度;Lo(x,y)为空间中某点到目标车的等效距离;δ为感知系数,这里取1.Lo(x,y)的计算方法如下:
Lo(x,y)=
(3)
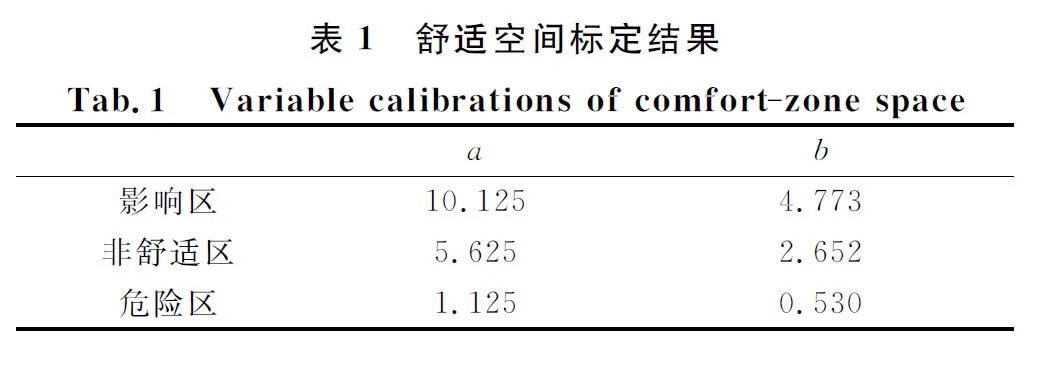
式中:θ(t)为t时刻目标车辆与客体中心连线与前进方向的夹角;γ(t)为目标车辆在t时刻运动方向的角度;a和b分别为纵向反应系数和横向反应系数,需要进行标定.
对于客体,骑行者最为关心的是周围车辆的速度以及车辆类型.而车辆类型差异则表现在质量和相对速度上.因此,客体属性表达式如下:
G=Δv·M
(4)
式中:Δv为客体与目标车辆的相对速度;M为客体质量.根据调查,电动自行车的质量约为人力自行车的3倍.因此,若以人力自行车质量为单位质量取1,电动自行车质量则取3.
常见的骑行行为动机有追求期望速度、逃离或适应当前状态(跟车或超车)、让行后方车辆以及紧急避免碰撞等4种[7].根据当前时刻受到的骑行压力,骑行者产生相应的行为动机,并以此为依据,具体结合周围环境信息,在满足安全的前提下做出决策,选择合适的行为使自身尽量保持舒适骑行的状态.
2.2.2决策层
骑行者的行为决策是行为动机指导下的理性决策过程.决策所考虑的因素包括目标车辆及其周围所有车辆的速度、间距等信息.车辆根据当前环境状况及自身运动特征,选择合适的动作作为决策结果.具体的决策逻辑(目标车辆每一时刻的行为决策全过程)如下:
步骤 1:从动机层输入动机
步骤 2:如果:动机为追求期望速度
输入目标车当前速度vn以及期望速度vd,并执行期望速度模型(详见第2.2.3节)
步骤 3:如果:动机为逃离或适应当前状态
步骤 3.1:输入目标车当前坐标(x,y)、速度vn,以及交互车辆当前坐标(x′,y′)、速度vn+1
步骤 3.2:如果:交互车辆和目标车辆纵向距离S小于阈值St且目标车速度vn大于交互车辆速度vn+1,进入步骤 3.3
步骤 3.3:如果:交互车辆左侧横向净空Cl大于右侧净空Cr,且大于阈值Ct,向左偏移执行超车模型(详见第2.2.3节),Ct取1.5 m
否则如果:交互车辆Cr大于Cl,且大于阈值Ct,向右侧偏移执行超车模型(详见第2.2.3节)
否则如果:都小于阈值,进入步骤 3.4
步骤 3.4:执行跟车模型(详见第2.2.3节)
步骤 4:如果:动机为让行后方车辆
步骤 4.1:输入目标车辆当前坐标(x,y)、速度vn,以及交互车辆当前坐标(x′,y′)、速度vn+1
步骤 4.2:如果:目标车辆右侧没有其他车辆,执行让行模型(详见第2.2.3节)
否则,保持当前速度直行
步骤 5:如果:动机为紧急避免碰撞
执行减速避让模型(详见第2.2.3节)
2.2.3执行层
根据决策结果,骑行者执行相应的动作.在物理隔离路段中,非机动车骑行者的典型行为有追求期望速度、超车、跟车、减速避让和横向让行等5种.每一种行为对应的运动模型则将在下文给出.
(1) 期望速度维持模型
期望速度是指骑行者在不受外界干扰时的自由运动速度.非机动车骑行者在自由行驶状态下,往往期望将自身速度维持在期望速度水平.本文借鉴社会力模型中驱动力的形式,期望速度维持模型的公式如下:
(5)
式中:ad为期望加速度;vd为目标车辆期望速度;τ为目标车辆速度变化的松弛系数,需要分别对不同类型非机动车进行标定.
(2) 超车模型
为简化计算复杂度,将超车行为解耦在横、纵向上分别考虑.根据Ni等的研究[31],非机动车超车的过程可以分为超车接近、偏移和返回三个阶段,同时,在纵向上,其纵向加速度变化规律如下:
(6)
式中:Δs为目标车辆与被超车车辆之间的纵向距离;alz为目标车辆的纵向加速度.
在横向上,借鉴余弦函数的形式[32],具体公式如下:
(7)
式中:ao为超车横向加速度;yd为目标车辆在对应阶段的期望横向偏移量;to为各阶段的持续的时长;t′为距相应阶段的开始时刻.
(3) 跟车模型
已有研究表明,非机动车只有在车辆较多且不能完成其他动作时,才会选择跟车行驶[33].在现有的跟车模型中,Gazis-Herman-Rorhery模型最为经典且被广泛使用[34].因此本文选择该模型作为跟车行为的运动模型.其公式如下:
(8)
式中:af(t)为t时刻的跟车加速度;Δv(t-ε)是前车和目标车辆在t-ε时刻的速度差;ΔS是前车与目标车的距离;ε为反应时间;α,β,γ为常量,在这里均取1.
(4) 减速避让模型
当前方产生突发事件时,减速避让行为发生.此时,在潜意识的支配下,骑行者会尽可能快地降低速度甚至停车.因此对于减速避让,一个合理的操作是以最大减速度来降低速度.本文假定骑行者始终以最大的减速度减速并保持恒定,取2 m·s-2.
(5) 横向让行模型
当后方车辆接近自身时,骑行者出于安全意识往往会主动向另一侧调整横向位置,以让行后方车辆.让行模型公式如下:
(9)
式中:ay为让行行为的加速度;e为目标车辆当前位置到横向安全位置的方向向量.
此外,由于非机动车运动受到车道边界的约束,因此,还需要考虑车道边界对运动的影响.借鉴社会力模型中边界力Fb形式,具体的边界约束模型如下:
Fb=A·exp(-d/B)
(10)
式中:参数A和B分别描述约束力大小及其影响范围,为待标定参数;而参数d为非机动车当前位置与边界的垂直距离.由于在物理隔离路段,非机动车道左右两侧边界均为硬隔离,因此,两侧的边界力大小应当相等,但方向相反.
3 数据采集与模型标定
3.1 数据采集
本文选取上海市静安区天目西路作为数据采集地点,道路几何设施情况如图3所示.数据采集地点为远离上下游交叉口的基本路段,且具有使用机非物理隔离的非机动车道.拍摄时间均选取通勤高峰时段.天目西路数据采集路段长80 m,非机动车道宽4.0 m,视频时长90 min,小时流量约为2 000辆·h-1.
利用高精度视频数据提取软件获取非机动车轨迹数据,采样间隔为0.12 s.轨迹数据信息包含:车辆编号,位置坐标,速度,加速度等.最终,天目西路得到有效轨迹数据378条,电动自行车和人力自行车比例为0.85∶0.15.

图3 数据采集地点
3.2 模型参数标定
利用3.1节的轨迹数据,并依据舒适空间的量化方式,在非机动车逐渐与交互对象接近的过程中,计算来自交互对象的骑行压力大小变化情况.同时,结合轨迹数据和视频的真实情况,对应不同骑行压力大小时骑行者的行为变化.最终,本文得到舒适空间各区域边界的阈值见表1.
而执行层的行为模型的待标定参数共3个.本文利用遗传算法,并以速度误差为代价函数来标定模型,得到各参数取值见表2.
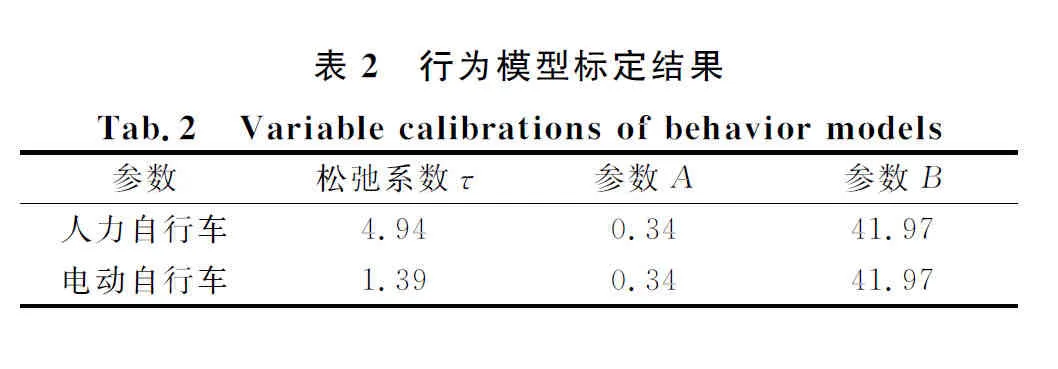
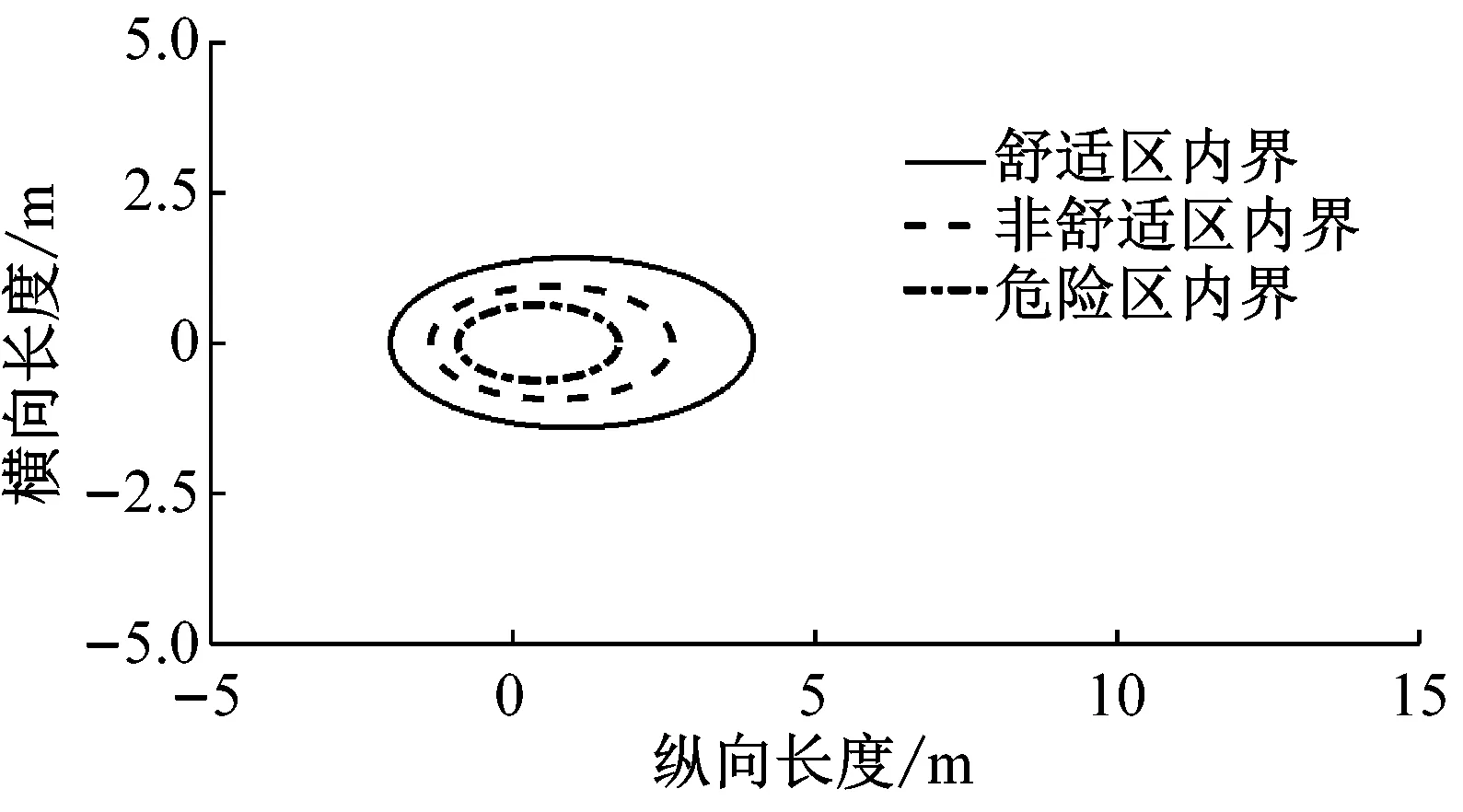
根据标定结果,本文以天目西路为例,取人力自行车和电动自行车的速度分别为4和7m·s-1,绘制不同密度下两种自行车的舒适空间变化情况,如图4所示.从图中可以看到,当密度相同时,速度较慢的人力自行车的舒适空间范围较小;而对于同类型的自行车,当密度较小时,舒适空间较大.
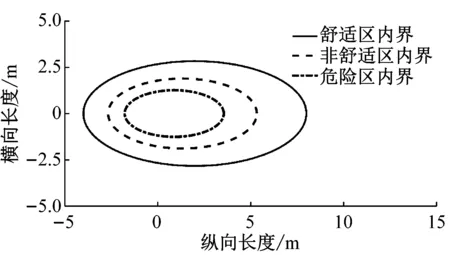
人力自行车

电动自行车
a 场景一:非机动车流密度为1/40时舒适空间各区域空间范围
人力自行车
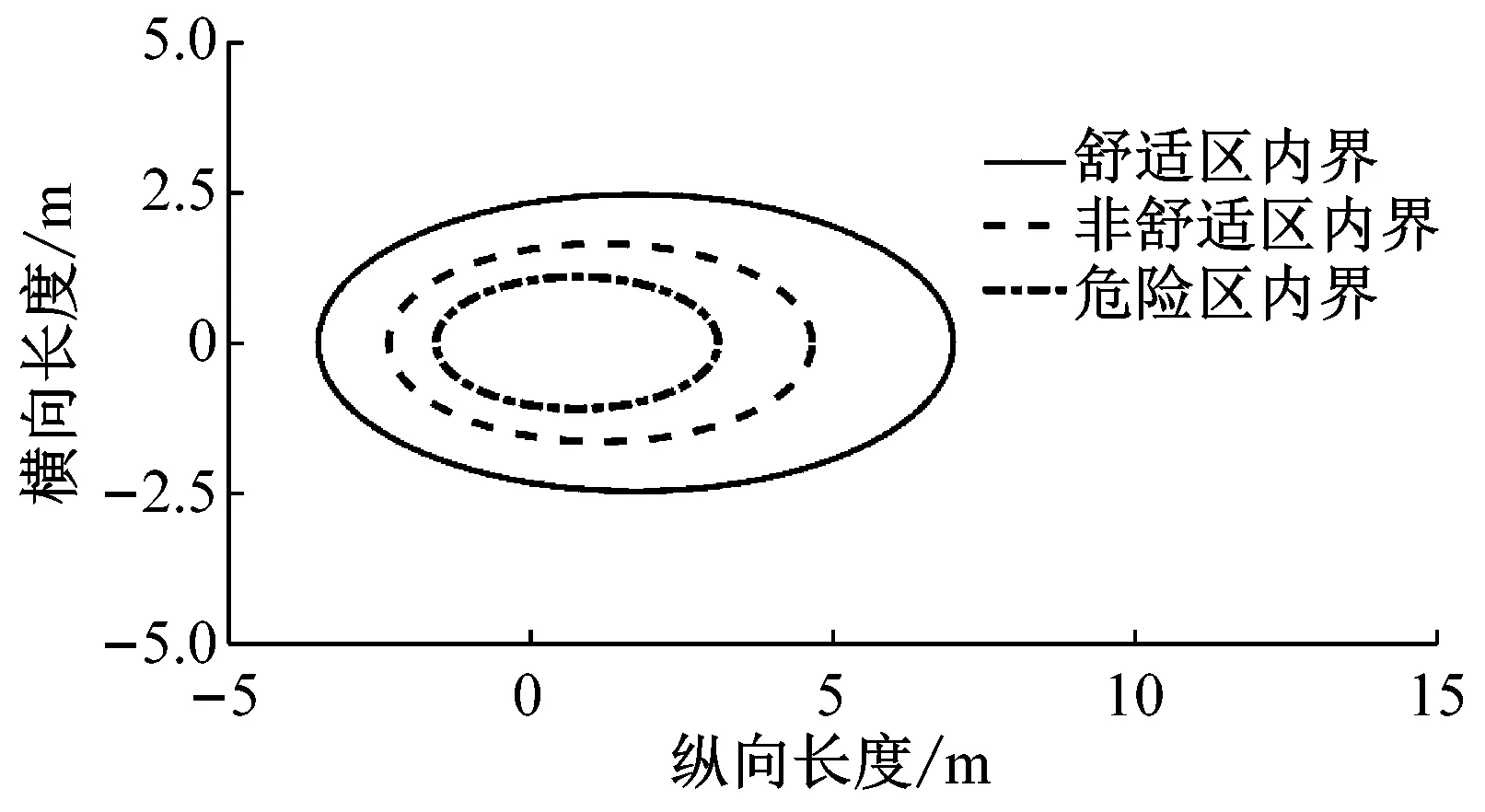
电动自行车
b 场景二:非机动车密度为1/20时舒适空间各区域空间范围
图4 不同车型不同密度下的舒适空间范围
Fig.4 Comfort-zone space range of different kinds of non-motorized vehicles
4 模型仿真及评价
利用Matlab软件搭建MDO模型数值仿真平台.仿真步长为0.12 s,仿真逻辑流程如图5所示.

图5 仿真逻辑流程
选择天目西路作为仿真研究案例,并将MDO模型的仿真结果与实际数据以及社会力模型仿真结果进行对比.社会力模型的基本公式如下:
(11)
式中:fm为向前驱动力;fmn表示车辆间排斥力;fmu为边界约束力;m,n分别表示当前对象及相互作用的客体;u表示边界;ξ为随机项.fm与MDO模型中的期望速度维持模型相同,而车辆间排斥力及边界约束力则与MDO模型的边界约束模型相同,这里不再赘述.
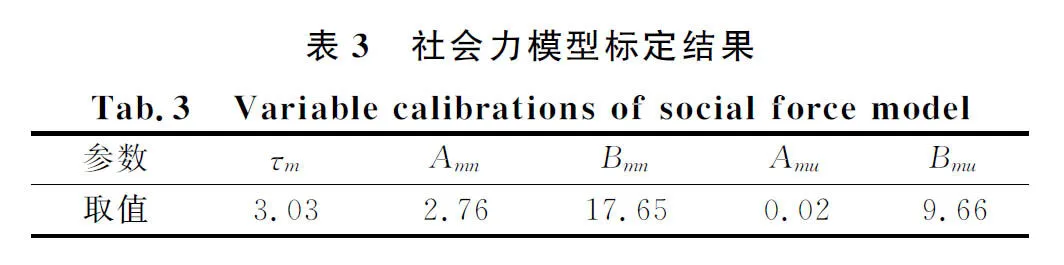
利用遗传算法对社会力模型进行标定,其各参数取值见表3.其中τm为fm的松弛系数;Amn和Bmn为fmn的参数;Amu和Bmu为fmu的参数.
本文选取轨迹特征、速度分布、空间分布特征及超车行为特征等微观指标,来验证模型有效性.
4.1 轨迹特征
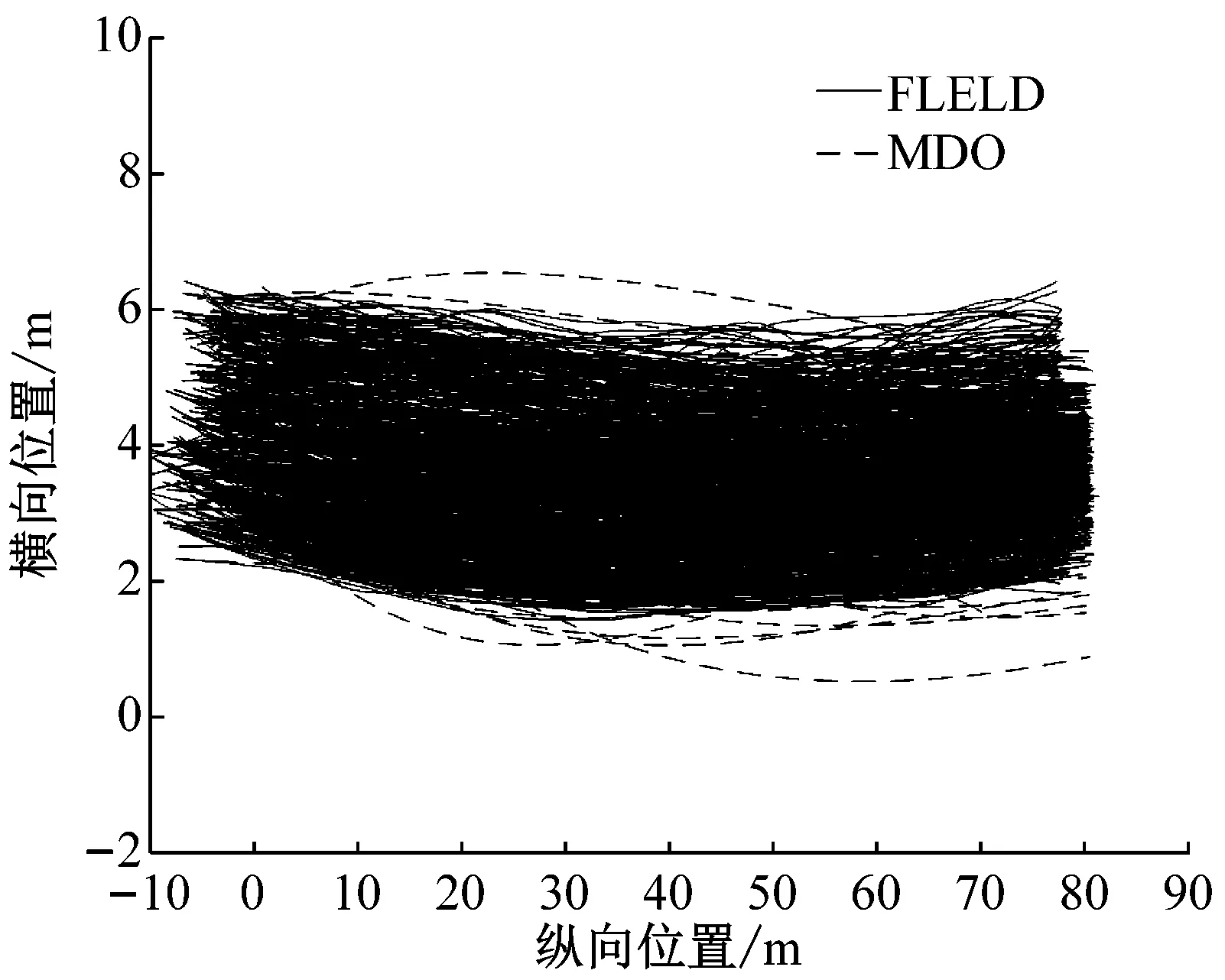
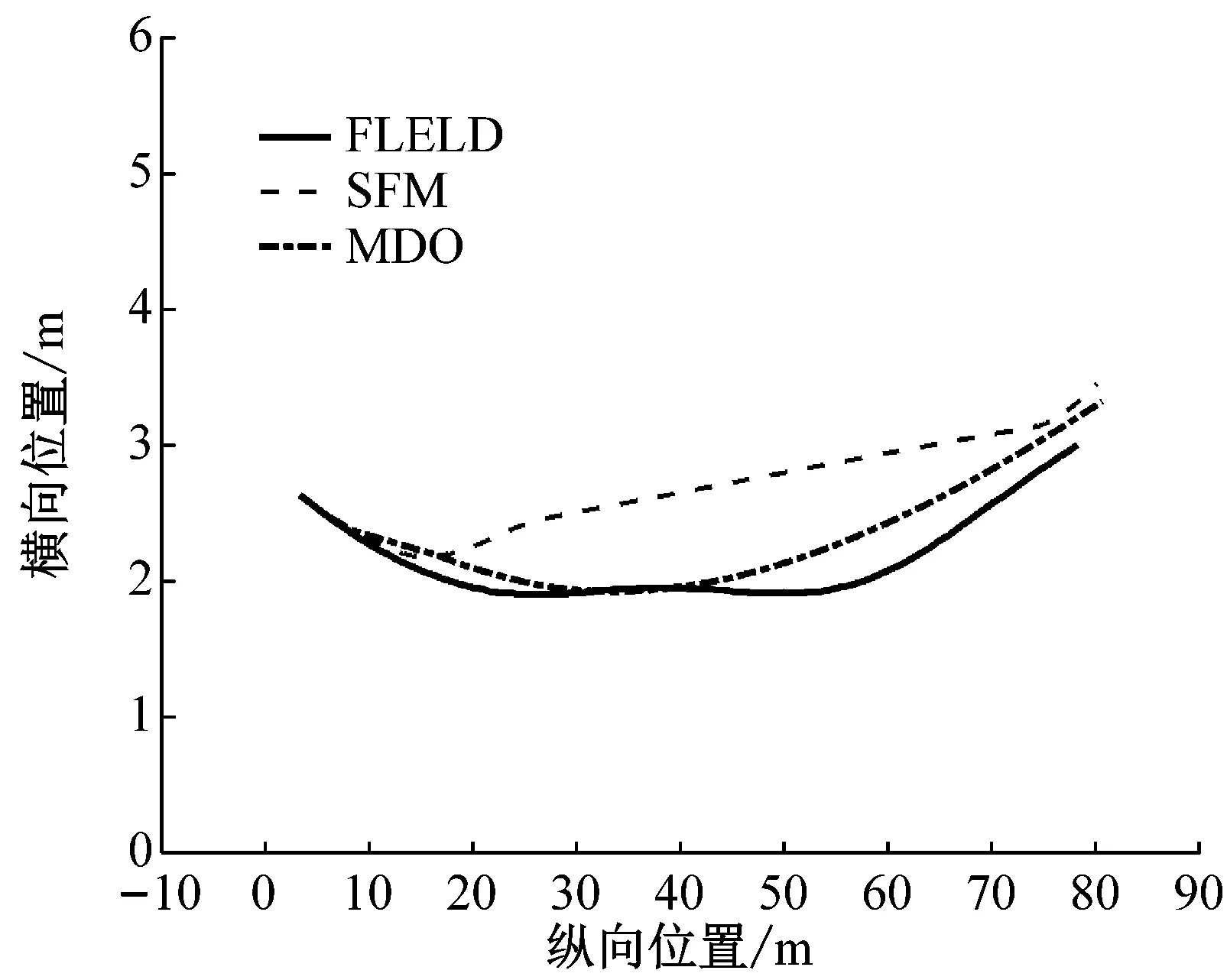
选择整体轨迹覆盖情况(图6a)、单条轨迹变化情况(图6b)和轨迹横纵向的均方根误差(RMSE)作为轨迹特征比较指标.图6a表明,轨迹的整体覆盖情况良好,其中,社会力模型和MDO模型的横向RMSE分别为0.98和0.64 m,纵向则分别为28.7和19.2 m.这说明MDO模型在整体上更能够较好的反映真实场景.同时,从图6b中可以看出,相比于社会力模型,MDO模型单条轨迹变化趋势更加接近真实数据,轨迹的重合度更高.因此,MDO模型能够更好地表征非机动车骑行者的实际运动过程.在图例中,FIELD表示真实数据,MDO表示本文所提出的模型,SFM则为社会力模型(下同).
a 轨迹覆盖
b 单条轨迹变化趋势
图6 轨迹匹配程度
Fig.6 Trajectories matching results
4.2 速度分布
图7是社会力模型SFM和MDO模型的仿真结果,与实证数据的速度分布对比图.从图中可以看出,相比于社会力模型,MDO模型仿真结果的速度分布整体上更加接近实证数据,平均速度则仅相差约0.21 m·s-1.这说明,MDO模型能够更好地表现非机动车运动时速度的变化情况.
4.3 空间分布特征
图8为MDO模型和社会力模型在每一仿真步长中,目标车辆与交互车辆间距分布情况与实证数据的对比结果.从图中可以看出,MDO的间距分布更加接近真实情况,且间距小于2 m的比例明显少于社会力模型,这表明MDO模型中车辆碰撞的几率小,能够避免社会力模型存在碰撞问题,模型的整体表现也更接近真实情况.
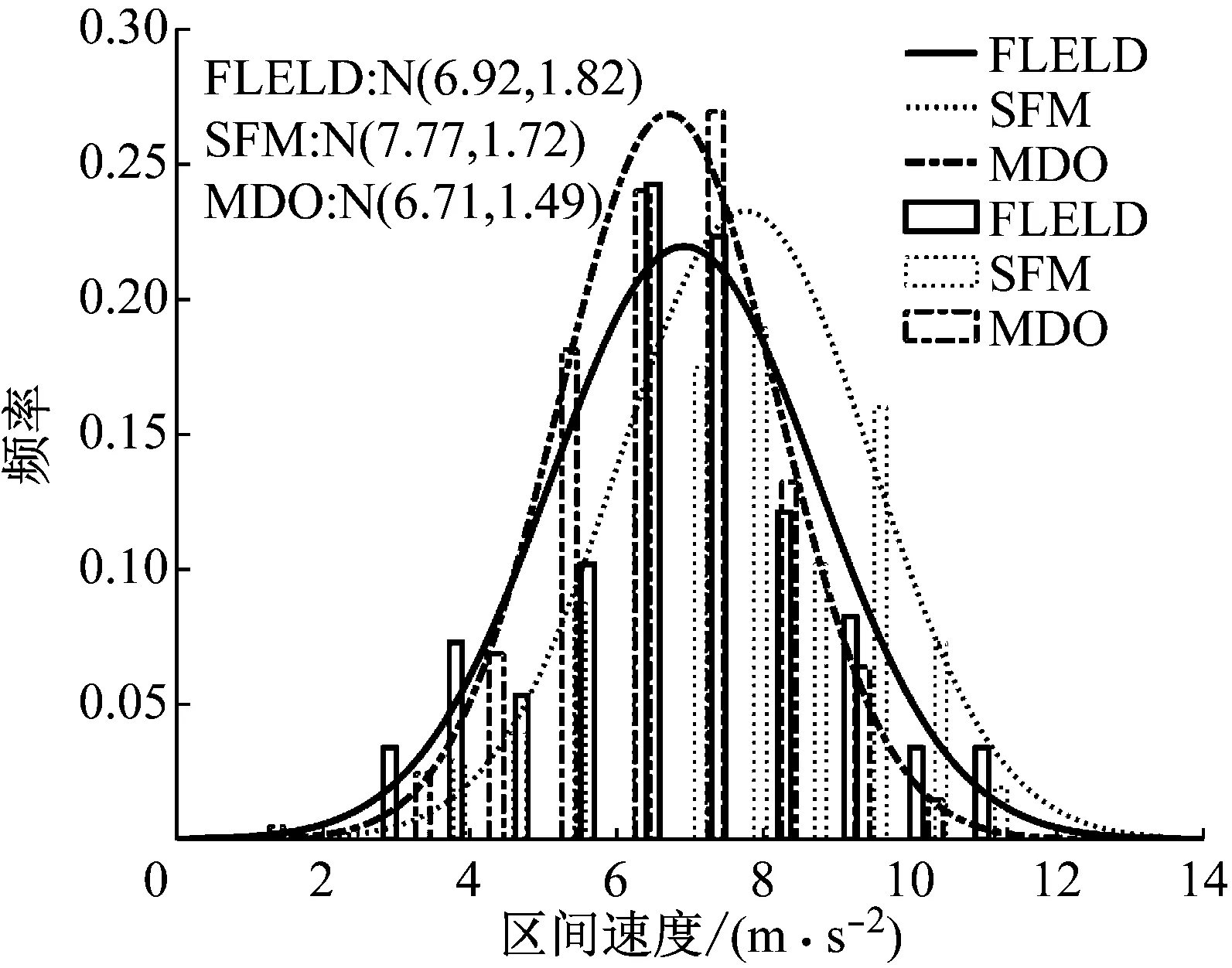
图7 速度分布
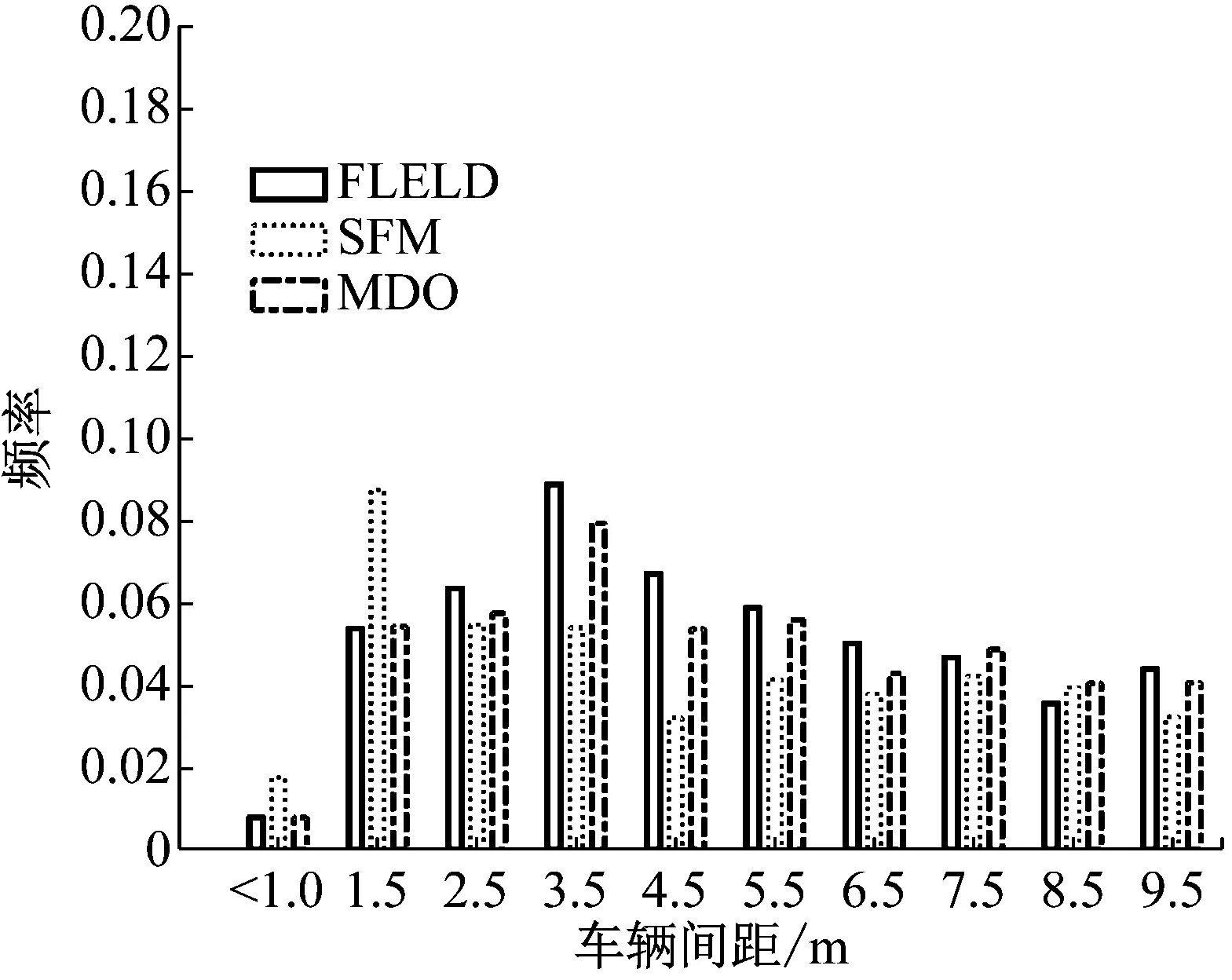
图8 车辆间距分布
4.4 超车行为特征
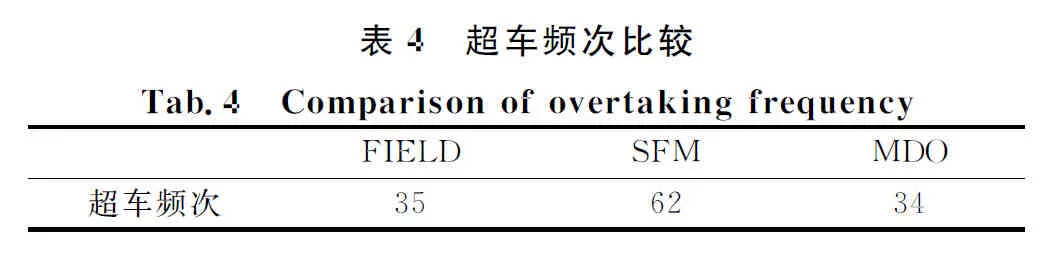
选择超车起始时刻,本车与交互车辆间的横向与纵向间距(图9),以及超车频次(表4)作为行为维度的评价指标.图9表示该指标的MDO模型和社会力模型仿真结果与实证数据的对比.从图中可以看出,社会力模型在执行超车时,纵向以及横向间距的选择上具有很强的随机性,取值分散.而MDO模型则能够较好地描述在超车行为发生时,骑行者对于横向和纵向间距的选择情况,结果也更加接近真实数据.表4则比较了实证数据与两种模型的仿真结果的超车频次统计结果.从表中可以看出,相比之下,MDO模型的超车频次仍然更加接近真实数据,这说明MDO模型在描述行为的产生方面也具有一定的优势.
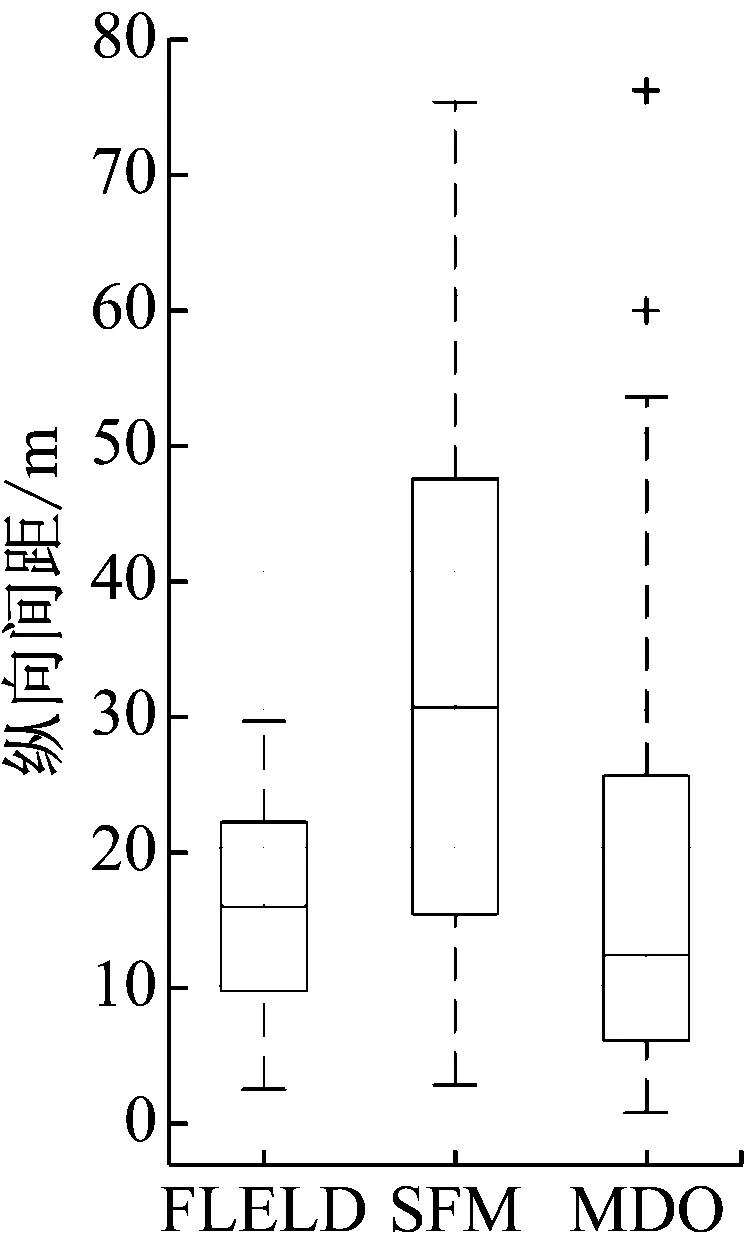
a 纵向间距
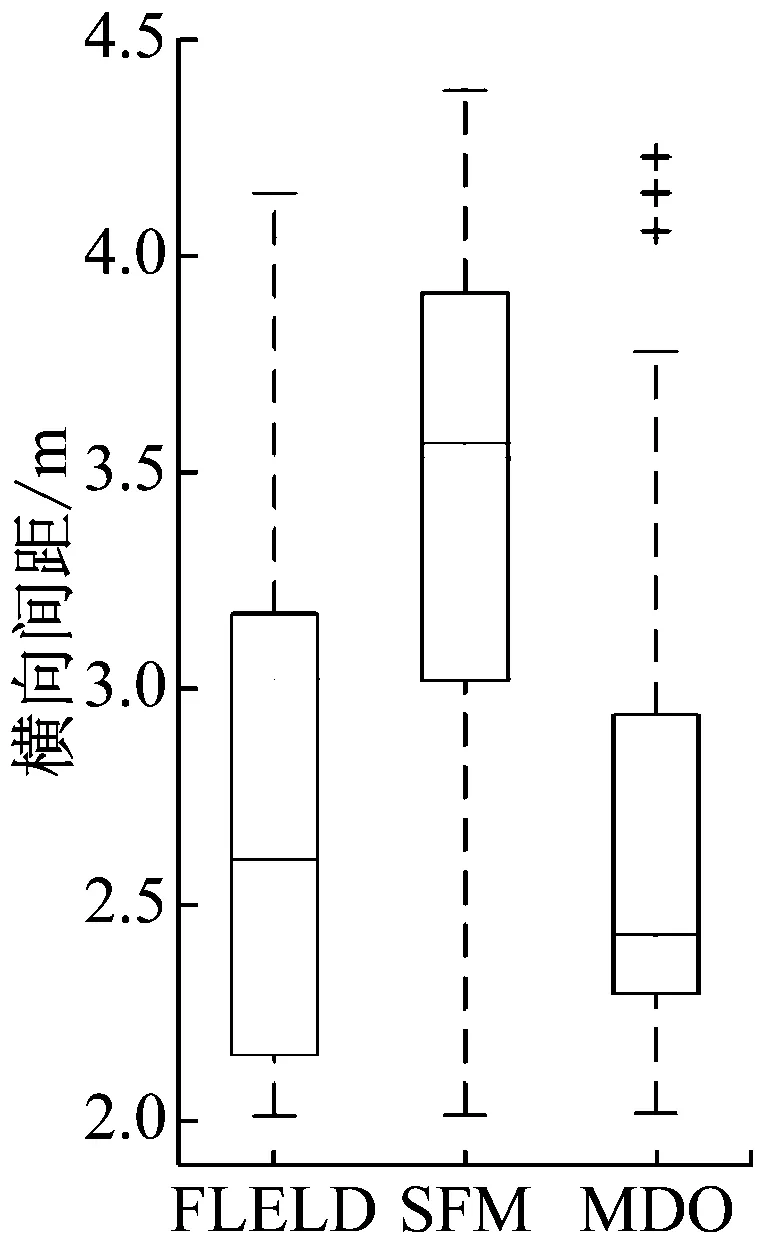
b 横向间距
5 结语
为了更加精细化刻画异质非机动车流特征并能够在二维层面上描述非机动车的微观行为,本文针对物理隔离路段上的异质非机动车流,从行为动机产生、决策到执行全过程的角度出发,首次提出舒适空间理论并据此构建了一种全新的微观二维非机动车交通流模型(MDO模型).仿真结果表明,相比于常用的社会力模型,本文所提出的MDO模型,能够更好地表征异质非机动车微观层面上的运动特征.模型有助于丰富非机动车流建模方法,并能够为其他方面的研究,如道路设施的布置改进等提供基础仿真模型的支撑.
本文的主要创新点如下:
(1) 首次提出舒适空间理论来表征非机动车行为动机的产生原因.同时,该理论充分考虑了非机动车流的异质性和可压缩性特征,为精细化描述非机动车流特征提供了思路.
(2) 基于舒适空间理论,提出了一种非机动车动机-决策-执行三层框架模型(MDO模型),来模拟异质非机动车行为从动机的产生,到决策执行的全过程.
(3) 实现了非机动车的二维运动,使模型仿真结果能够更加接近车辆在现实中的运动.
后续工作将继续利用不同场景的数据,并结合其他相关实验完善舒适空间理论;同时,还将继续针对不同的交通场景进行测试,以增强模型的可拓展性.
猜你喜欢
疯狂英语·新悦读(2022年7期)2022-11-23 00:33:39
少先队活动(2022年5期)2022-06-06 03:44:20
音乐天地(音乐创作版)(2022年1期)2022-04-26 13:51:14
北京第二外国语学院学报(2021年2期)2021-08-13 08:34:34
中国(俄文)(2020年4期)2020-11-24 00:16:05
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
草原歌声(2020年1期)2020-07-25 01:45:16
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29