基于固定角度模式的推力优化分配*
2019-07-01 06:27:20朱梦飞徐海祥
武汉理工大学学报(交通科学与工程版) 2019年3期
朱梦飞 徐海祥
(武汉理工大学交通学院1) 武汉 430063) (武汉理工大学高性能船舶技术教育部重点实验室2) 武汉 430063)
0 引 言
当环境力较小而方向变化频繁时,为减少推进器机械磨损和能量消耗,通常采用固定角度模式进行分配[1].早期的推力分配系统基本采用广义逆法,该方法的实时性好,但求解过程中没有考虑推进器的物理约束,所得到的解可能会出现突变,甚至超出系统的能力而导致分配失败[2-4].随着计算机的发展,迭代优化算法也被用于求解推力分配问题,序列二次规划法在推力分配研究中已经得到很多学者的应用,充分考虑了所设定的各种约束条件,但其依赖初始值的选取,甚至会出现不能全局收敛的现象[5-6].
文中引入增广拉格朗日乘子法求解船舶处于环境力小但方向频繁变化海况下固定角度模式的推力分配问题.该方法将约束问题转化为无约束问题,用无约束最优化方法求解得到推进器的推力.为验证该算法的有效性,对一艘装备有三个全回转推进器的动力定位船舶模型进行了仿真.
1 推力分配数学模型
1.1 目标函数
以船舶能耗最少、推力误差量最小及推进器磨损最小为目标,其目标函数为
(1)
式中:第一项表示船舶能耗;第二项为推力误差惩罚项,W为正定对角矩阵;第三项为推进器磨损惩罚项,α0为推进器上一时刻方位角,Ω为正定对角矩阵.
1.2 约束条件
在满足动力定位系统中三个自由度控制力与力矩的前提下,考虑推进器的推力上下限、推力变化率、角度变化率,以及磨损等物理与机械因素,则推力分配模型中的约束条件为
τ=B(a)T+s
(2)
Tmin≤T≤Tmax
(3)
ΔTmin≤ΔT≤ΔTmax
(4)
Δαmin≤Δα≤Δαmax
(5)
δi≤|αi-θi|≤360°-δi
(6)
式中:τ=[τX,τY,τN]∈R3为目标力与力矩;T=[Ti]为各推进器的推力;α=[αi]为各推进器的方位角;s为松弛变量;Tmin与Tmax分别为全回转推进器的推力下限与上限;ΔTmin与ΔTmax分别为推力变化率的最小与最大限制;Δαmin与Δαmax分别为角度变化率的最小与最大限制;n为推进器个数;θi为两相邻推进器连线与X轴夹角;δi为推进器的禁区角;B(α)为推进器的配置矩阵,
(7)
式中:lxi,lyi为第i个全回转推进器的位置坐标.
2 固定角度分配优化算法
2.1 固定角度分配
动力定位船舶处在海洋环境力较小但方向频繁变化的海况时,为减少推进器的磨损和能耗,可设置固定角度来进行推力分配[7].
2.2 增广拉格朗日乘子法
动力定位船舶推力分配数学模型可看作一个非线性约束问题,其通用数学模型为
minf(x)
s.t.hi(x)=0,i=1,2,…,l,
gj(x)≥0,j=1,2,…,m.
(8)
式中:目标函数minf(x),等式约束hi(x)(i=1,2,…,l)和不等式约束gj(x)(j=1,2,…,m)都是定义在Rn上连续可微的多元实值函数,且至少有一个是非线性的.
对于一般非线性约束优化问题(8),不能用消元法将其转化为无约束问题,因此求解时必须既使目标函数值下降,又要满足约束条件,本文采用增广拉格朗日乘子法进行求解[8-9].以下列出了该方法的实现步骤.
步骤1选取初值 给定x0∈R,μ1∈Rl,λ1∈Rm,σ1>0,0≤ε≤1,φ∈(0,1),η>1,令k= 1.
步骤2求解子问题 以xk-1为初始点求解无约束子问题的极小点xk:
(9)
步骤3检验终止条件 若βk≤ε,停算,输出xk作为原问题的近似极小点;否则,转步骤4,其中
(10)
步骤4更新罚参数 若βk≥φβk-1,令σk+1=ησk;否则,σk+1=σk.
步骤5更新乘子向量
(μk+1)i=(μk)i-hi(xk),(λk+1)j=max{0,(λk)j-gj(xk)}
(11)
步骤6令k=k+1,转步骤1.
3 仿真结果与分析
为验证本文采用的增广拉格朗日乘子法在固定角度模式下进行推力分配的有效性,以一艘装备三个全回转推进器的动力定位船舶模型为对象进行仿真分析.推进器的布置见图1,其相关技术参数见表1.
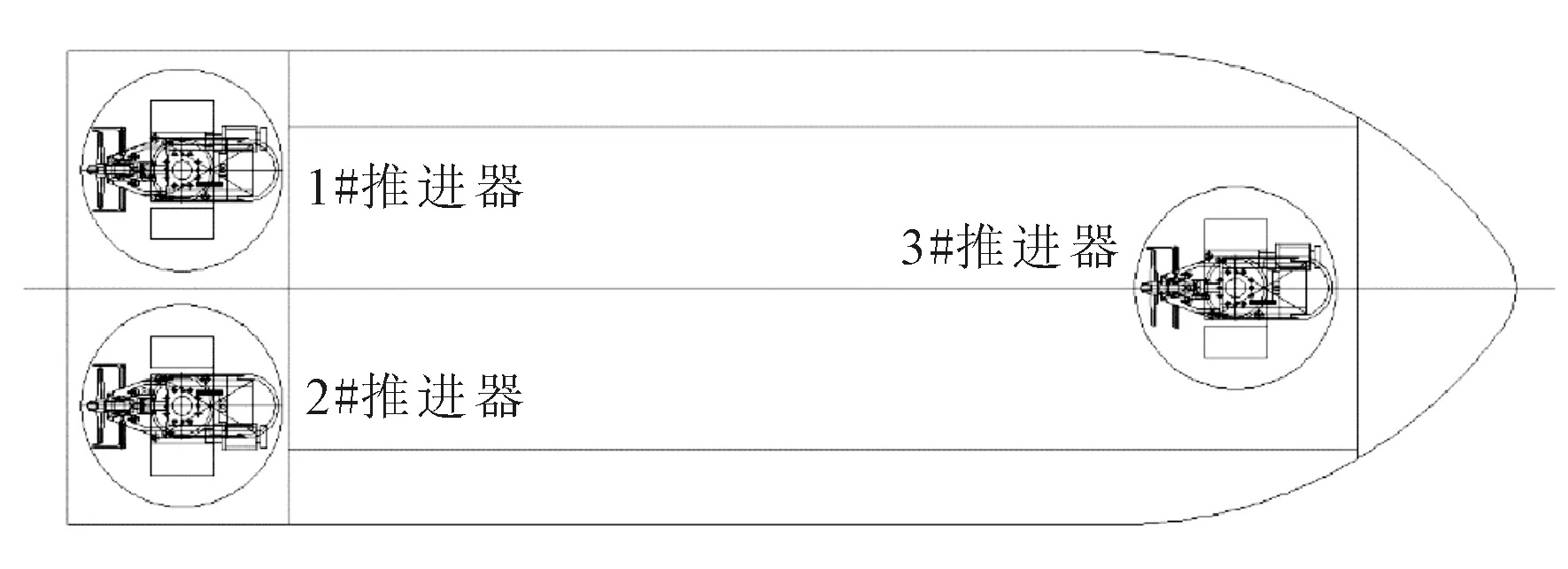
图1 推进器布置
表1 推进器技术参数
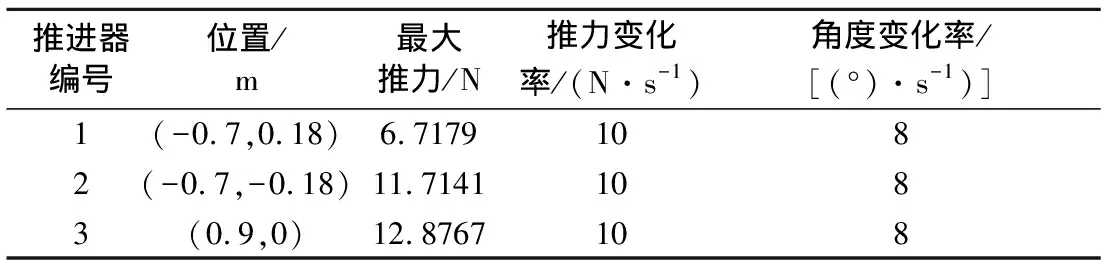
/m/N/(N·s-1)/[(°)·s-1)]1 (-0.7,0.18)6.71791082 (-0.7,-0.18)11.71411083 (0.9,0)12.8767108
仿真中假定船舶处于环境载荷较小但方向可能不断变化的海况.图2~3为船舶定点定位工况下推进器的推力分配结果.

图2 待分配控制力、力矩与实际分配力矩

图3 全回转推进器
图2a)中,纵向待分配控制力与纵向实际分配推力吻合得很好,即使待分配力在短周期内出现突变,实际分配的推力也能满足控制需求.图2b)~c)中横向待分配控制力、艏向待分配控制力矩与实际分配的推力、力矩之间存在微小偏差,但其满足船舶定位精度要求,且实际分配力、力矩相较于待分配力、力矩更加平滑,使得推进器发力更平稳.由图3a)可知,三个全回转推进器的推力大小和推力变化率均满足其物理约束.在图3b)中,1#、2#、3#全回转推进器的角度分别固定为120°,240°,0°,并未因控制力突变而导致推进器角度改变,使得推进器的连续转动减少,提高了定位过程中船舶的操纵性能,减少了其机械磨损和能量消耗,在工程应用中能大大提高推进器的使用寿命,并降低船舶的能量消耗.这表明采用增广拉格朗日乘子法能有效求解固定角度模式的推力优化分配问题.
4 结 束 语
针对船舶处于环境力较小而方向频繁变化海况中的固定角度模式推力优化分配问题,本文采用了增广拉格朗日乘子法将推力分配这一非线性约束问题转化为无约束问题进行求解,通过无约束最优化方法求解得到推进器实际分配推力.仿真结果表明其求解的精度较高,在满足了推进器的物理约束的同时,由于推进器的角度固定而很大程度上减少了其机械磨损和能量消耗,且能满足动力定位船舶的定位精度要求.
猜你喜欢
数学物理学报(2021年6期)2021-12-21 06:24:00
舰船科学技术(2021年12期)2021-03-29 01:28:38
数学物理学报(2019年2期)2019-05-10 11:32:38
数学物理学报(2019年1期)2019-03-21 05:26:18
数学物理学报(2018年6期)2019-01-28 08:57:52
当代陕西(2018年12期)2018-08-04 05:49:08
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:34
咸阳师范学院学报(2016年6期)2017-01-15 14:18:41
水利科技与经济(2016年9期)2016-04-22 01:07:30
学习月刊(2015年10期)2015-07-09 03:35:12