
基于EtherCAT总线伺服在机器人上的应用研究
2019-06-27 00:07陈永生王静高茜
科技创新与应用 2019年11期
关键词:机器人
陈永生 王静 高茜
摘 要:文章就欧瑞传动的EtherCAT总线伺服在六关节机器人上的使用进行了探讨及分析,与脉冲式伺服驱动器相比,总线伺服应用于六关节机器人上接线简单、抗干扰能力更强、调试方便、具备高速数据采集等优点,并简化了操作,提高可行性和易用性,实现了机器人上更优化解决方案,使机器人控制性能进一步得到提高。
关键词:欧瑞传动;EtherCAT总线;伺服驱动器;机器人
中圖分类号:TP242 文献标志码:A 文章编号:2095-2945(2019)11-0167-02
Abstract: In this paper, the application of EtherCAT bus servo driven by Ori in six-joint robot is discussed and analyzed. Compared with pulse servo driver, the bus servo being applied to the six-joint robot has the advantages of simple connection, stronger anti-interference ability, convenient debugging, high-speed data acquisition, etc., and simplifies the operation, improves the feasibility and ease of use, and realizes the more optimized solution on the robot. The control performance of the robot is further improved.
Keywords: Ori drive; EtherCAT bus; servo driver; robot
前言
焊接随着工业4.0的到来以及机器人行业的发展,传统的脉冲模式控制存在着很大程度上对机器人性能的制约,高速工业现场总线成为机器人主力发展方向,无论作为机器人三大核心部件的伺服或是控制系统都提供了更加可靠、高效的总线解决方案,且易于与现场其它设备组网,为实现自动化流水线及建立智能工厂提供了基础。
EtherCAT(Ethernet for Control Automation Technology)是一种基于以太网开发的构架的实时工业现场总线通讯协议, EtherCAT的出现为系统的实时性能和拓扑的灵活性树立了新的标准。
1 系统方案
1.1 产品简介
SD20-E系列产品,是当今性能较高的伺服驱动装置,它属于典型的总线型,从目前来看,基本上在诸多领域都可以得到影响,而且它拥有丰富的功能,譬如多段位、全闭环、中断定长等。正是其具有丰富之功能,使之可以很好的满足用户的多元化需求。在某些专用场合,此系列产品,基本上集成了相应的PLC功能,相关客户,借助于代码,可以对其进行简单的编程,这样就能更好的实现现场管控。它内置两种总线,如EtherCAT与CANopen,这使之可以更好的应用诸多工业领域 [1]。具有如下特点:
第一,采用了内置总线技术,使之应用更为便捷。
第二,运行速度更快。该装置以转矩前馈作为基础,来实现相应的高响应控制。
第三,便捷特性。相关的操作十分简单,而且焊接线也颇为简单,使用快捷的DB系列插头。
第四,智能化。使用简单,可以支持惯量学习,再结合相关的滤波装置,可以使得性能变得更为优秀,而且还能结合差异性的场合,借助于更改指令来源,来对用户进行相应的调试。
第五,丰富的功能。配置专用上位机系统,同时还集成了建议的PLC装置,这些都使得操作与调试变得更为快捷,而它的指令频率可以达到4兆赫,同时还配置了高速DI通道,支持上述提出的两种总线,另外还可以使用多种类型的编码装置。
第六,实用性。该装置可以提供全闭环管控,驱动装置合适的环境更为广泛,能够支持多段位控制,在线转动惯量识别、振动控制,电池欠压保护、机械原点检测等等。
1.2 SD20-E系列伺服驱动器使用优势
SD20-E系列伺服驱动器支持EtherCAT通讯和串口通讯,其中EtherCAT支持CoE协议,CoE是基于EtherCAT 的CAN应用协议。
该装置EtherCAT总线主要特点为:
(1)适用性,只要配置了以太网控制装置,那么相应的控制单元,就能够充当该总线的主站。
(2)符合以太网标准,分析该总线的帧结构,可以得知它运用的是以太网帧,也就是IEEE802.3,传输速率可达 2×100M bit/s。
(3)可以提供多种的拓扑结构,譬如星型、线型等。
(4)整体效率颇高,能够对以太网带宽进行很好利用,并有助于数据传输,提高工作效率。
(5)具有较佳的性能,而且整体的同步时钟,得到很好的校准,因此能够实现诸多从站,低于1微秒差异的同步。
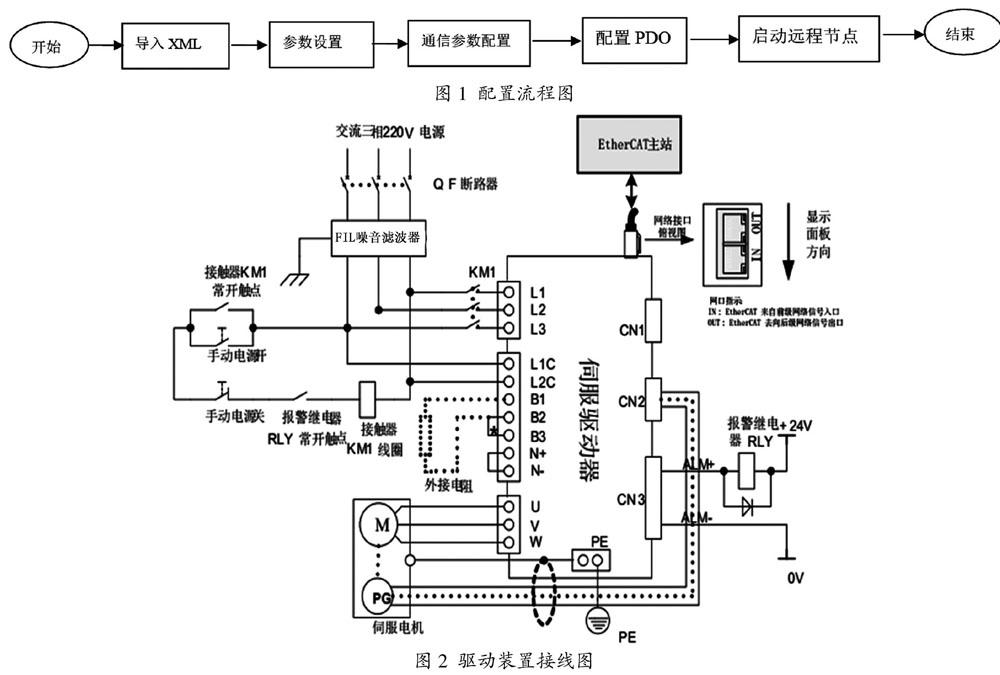
1.3 系统连接流程
欧瑞EtherCAT总线伺服配置文件和上位机系统做匹配,该控制装置,在机器人领域应用颇广,譬如节点通讯、关节电机管控、传感装置信息采集等。而该装置的通信功能,主要是借助于EtherCAT协议来实现,从而使得诸多模块实现通讯与信息交互,这样,就有助于伺服节点的拓展,同时也方便硬件系统的设计。具体参考图1配置流程。
1.4 系统调试流程
(1)总线与上位机匹配通过以太网控制器主站设置与SD20-E系列驱动器从站建立系统匹配。
(2)连接主电源线、通讯线缆,伺服编码器线、电机线
给SD20-E伺服驱动器L1、L2、L3、电源接线端子接入电源,通过以太网通讯线缆给以太网控制器主站和SD20-E伺服驱动器从站连线,通过编码器线缆和电机动力线给SD20-E伺服驱动器和伺服电机连线。务必保证控制系统、电机等的抱闸接线与伺服驱动器连接正确[2]。
(3)设置伺服控制模式为总线控制模式及通讯读写运行参数等设置SD20-E伺服驱动器控制模式为总线模式建立通讯,主要参数Po001: d 1 21;Po423:d 1。
(4)学习惯量,调整刚性等优化伺服对机器人的控制性能减速时间,避免过短的加速时间引起的机械冲击和抖动,根据机器人系统的需要正确选择脉冲当量,设定驱动器的电子齿轮比,电子齿轮的设定应满足加工精度的要求。
2 伺服接线系统
2.1 伺服主电源接线图
对于该伺服控制装置而言,它是机器人控制总线的重要构成,以EtherCAT为基础的机器人总线,需要相应的伺服系统,也要与该总线协议进行兼容。为了解决这个问题,欧瑞成功以EtherCAT总线为基础,开发了相应的伺服系统,可用于机器人关节控制和传感器控制。如图2所示,展示了相关伺服驱动装置的接线电路。
2.2 参数设定
3 结束语
欧瑞SD20-E伺服是基于脉冲型伺服基础上研发的支持工业现场总线的高性能产品,秉承了欧瑞对产品高质量、严苛的品质要求,为迎接工业4.0智能制造时代的到来提供了强大的基础。
参考文献:
[1]谢香林.EtherCAT网络及其伺服运动控制系统研究[D].大连理工大学,2008:22-23.
[2]杨斌,苏剑波.仿人机器人的分布式控制系统设计[J].控制工程,2010(18):38-39.
猜你喜欢
红领巾·萌芽(2022年2期)2022-01-31
学苑创造·A版(2017年9期)2017-09-25
知识就是力量(2017年2期)2017-01-21
快乐作文·低年级(2016年9期)2016-09-30
南风窗(2016年7期)2016-03-31
知识就是力量(2016年2期)2016-02-01
小朋友·快乐手工(2015年11期)2016-01-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
