
大型临近空间等离子体真空环境模拟技术研究
2019-06-27 09:32
计算机测量与控制 2019年6期
(1.北京卫星环境工程研究所,北京 100094; 2.航天恒星科技有限公司,北京 100095)
0 引言
传统的空间等离子体研究方法是通过发射深空火箭或人造卫星从而获取空间等离子体的数据参数,但由于空间试验仪器耗资巨大且不可重复利用,导致对许多微观物理过程难以进行精确研究。而试验室等离子体具有易于重复、诊断精确、耗费较小等的特点,利用试验室等离子来模拟空间物理过程对特定的空间观测现象进行研究,是一种新的试验手段和发展趋势[1]。大型临近空间等离子体真空环境模拟系统属于国家重大科技基础设施“空间环境地面模拟装置(SESRI)”中的重要组成部分,是空间等离子体环境模拟与研究系统的主体部分。
本文介绍了一种大型临近空间等离子体真空环境模拟技术,用于为空间等离子体环境模拟与研究装置提供试验所需要的真空工作环境,同时为天线组、目标模拟组件、磁体线圈、等离子体源等关键部件提供试验所需环境,并为相关的其他单元提供安装基础和接口等。该系统既是大型真空系统,同时又是复杂的机电一体化系统。系统的真空技术指标、结构稳定性和高可靠性是其最基本的要求。该系统主要由负压容器系统、真空获得系统和控制系统三部分组成,主要功能指标[2]包括:
1)真空罐体有效空间:直径Φ5 000 mm;柱段长度6 000 mm;
2)极限真空度:≤10 Pa(从大气压开始抽气后,6小时内达到);
3)工作真空度:罐体抽真空达到极限真空度后,充入工作气体氩气,能够实现真空度连续可调,当进气量为20~60 SLM任意给定值时,工作压力可达到100~1 000 Pa范围内任意设定值,控制精度应优于±5%;
4)真空系统总漏率:各漏点漏率之和≤1×10-5Pa·L/S。
1 负压容器系统
1.1 主体结构
临近空间等离子体环境真空罐罐体为卧式圆柱结构,罐体一端是大门,采用电动方式进行开关控制。罐体按照压力容器标准进行设计,材料选用优质304不锈钢,内表面抛光后粗糙度不大于1.6。直筒段设计长度为6 000 mm,内径为Φ5 000 mm,罐体总长约为8 454 mm,罐体结构如图1所示。
1.2 容器系统结构有限元分析
容器系统结构有限元分析旨在对真空容器在各种工况载荷状况条件下进行强度校核和结构稳定性的计算分析[3]。在此基础上对计算结果的精度进行分析,验证计算结果的收敛性。根据计算结果,从结构强度、刚度和结构稳定性3个方面进行分析,为真空容器结构的改进以及优化等给出建议。
对真空容器的三维模型进行几何清理,根据压力容器的实体结构直接按照区域进行网格划分,如图2所示。
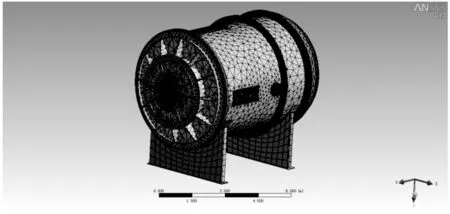
图2 临近空间容器网格图
对实体结构采用实体单元进行划分,根据要求附加材料属性,其中观察窗为石英玻璃,其余结构均为不锈钢材料。
设置模型的边界条件。约束模型一个鞍座的6个自由度,另一个鞍座竖直方向约束。对模型提交分析,并在后续处理中分别提取容器整体,并观察窗开孔处、结构突变处等局部应力/位移或分布应力/位移较大区域应力/位移分析图及最大应力/位移值[4]。
1.2.1 有限元计算结果
真空容器的整体应力分布与最大应力位置,如图3所示。其最大应力为113.2 MPa,应力较高的区域主要集中在真空罐体平面端盖组件的转接法兰处。
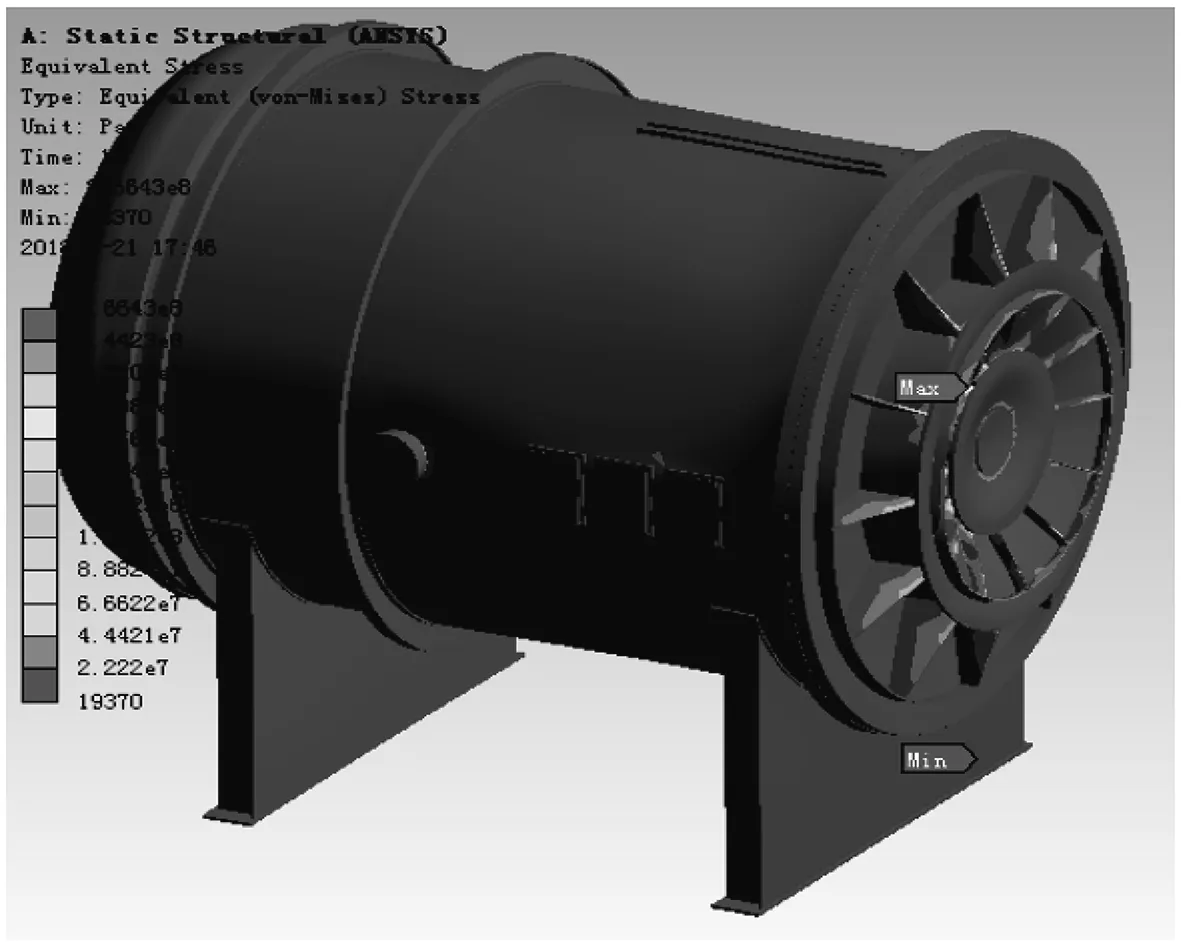

图3 真空容器的整体应力分布与最大应力位置
真空容器的整体位移分布与最大位移位置,如图4所示。其中最大变形位移为2.85 mm,出现在平面端盖组件的中间部位。
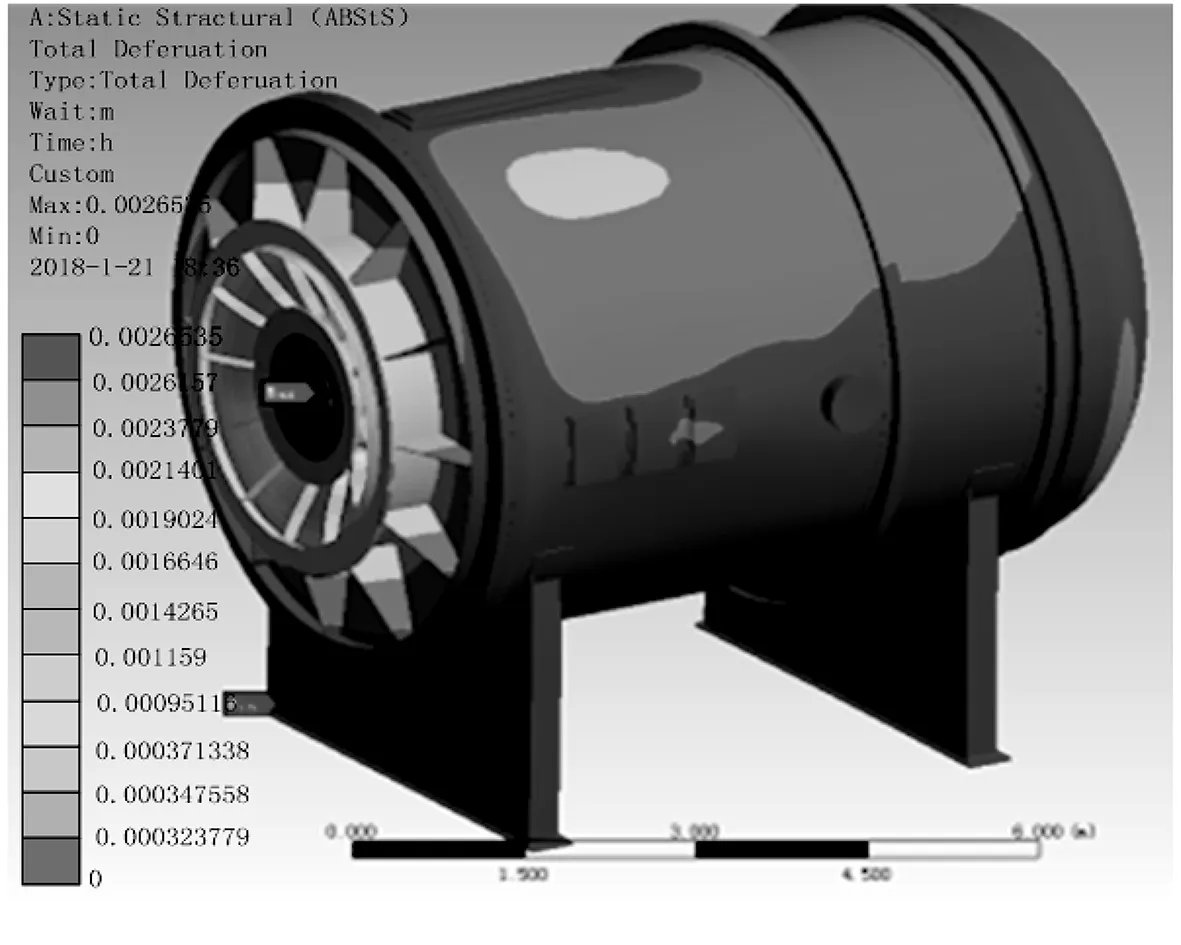

图5 容器直筒段的位移分布云图
图4 真空容器的整体位移分布与最大位移位置
提取直筒段的局部变形,容器直筒段局部变形位移量如图5所示,可以看出,结构变形较大的区域主要位于法兰开口的容器壁一侧,该段区域最大结构变形位移量为0.59 mm。
1.2.2 结果分析
1)真空容器的整体应力水平较低,其最大应力为113.2 MPa,小于不锈钢材料的许用应力,容器的结构强度满足要求;
2)容器直筒段局部变形图显示,最大结构变形位移量为0.59 mm。因此,临近空间容器由真空变形所导致的天线位置的偏移不会超过0.59 mm<2.5 mm(与抽真空前的校准位置相比较),满足任务的要求。
3)由有限元计算结果可以看出,容器系统的强度和形变均满足要求,容器不会发生失稳的情况。
2 真空获得系统
2.1 功能与组成
临近空间等离子体环境真空获得、测量及控制系统主要用于提供满足装置洁净真空品质要求和装置运行需求的真空获得能力。该系统由泵组、真空抽气管道、各类真空隔断阀门、复压阀门、波纹管、真空获得控制系统。系统原理如图6所示。

图6 真空系统组成原理图
2.2 真空系统设计计算
2.2.1 极限真空度所需抽速计算
真空系统为达到所需极限或工作真空度所需要的抽速[5],由下式决定:
(1)
式中,Pj为舱体所能达到的极限真空(Pa);P0为真空泵的极限真空(Pa);Q0为空载时,经过一定时间抽气后真空室的气体负荷(包括漏气QL、材料表面出气Qe)(Pa·L/S);Q1为真空室的工艺气体负荷;Seff为真空室抽气口附近泵的有效抽速(L/S)。
上式中,真空罐体的极限真空通常总是低于真空抽气机组的极限真空,即P0< 根据真空罐体尺寸以及其它分系统有关数据,计算出真空罐体内表面释放的总放气负载,具体数据如表1所示。 表1 真空罐体内部出气的计算值 表2 真空罐体内部出气的计算值 对于真空罐体漏气量,为使漏气不影响空载的极限真空度应限制漏气率,一般设备漏气率应比出气率低10倍[6],由于容器最后安装的法兰及接插件处易产生泄漏,故这些部件的漏率应占允许漏率的大部分,而容器的焊缝以后不会拆开,根据技术要求,确定真空系统总漏率≤1×10-5Pa·L/S。 经过上述计算,真空罐体空载时(内部无器件)内部气体负荷确定为5.0 Pa·L/S,装配微波暗室及全部运动、支撑部件后真空罐体内放气量约为8×104Pa·L/S,将放气量与所需极限真空度代入公式(1)进行计算,可知真空获得系统所需抽速需不小于8 000 L/S (约为28 800 m3/h)。 要求工作真空度:罐体抽真空达到极限真空度后,充入工作气体氩气,能够实现真空度连续可调,当进气量为20~60 SLM任意给定值时,工作压力可达到100~1 000 Pa范围内任意设定值。按照最大进气量60 SLM和100 Pa的最低工作压力代入公式(1)进行计算,可知真空获得系统维持工作真空度所需抽速需不小于8 000 L/S(3 600 m3/h)。 2.2.2 抽气时间所需抽速计算 真空获得系统还要求可将真空罐体从大气压开始抽气后,4小时内达到≤10 Pa;要满足真空储备舱抽气时间要求。可根据下式计算抽速: (2) 式中,t为抽气时间(h);Se为干泵的有效抽速(m3/h);V为容器的容积(m3);P1为开始抽气时的压力(Pa);P2为t时间后所达压力;K为修正系数。 综合以上计算,为满足临近空间等离子体环境模拟分系统真空罐所需要的真空指标,真空系统所需要的最低抽速需不小于8 000 L/S(约为28 800 m3/h)。 2.2.3 真空获得系统复核复算 根据粗抽机组初步布局位置可以假定估计粗抽主管道长度约10 m以内[7]。粗抽管道的流导可以由以下粘滞流长圆管道流导公式[8]进行计算: (3) 对选型后的真空机组能力进行复核复算[9-10],根据公式(1)可知,粗抽机组可将真空罐体抽至≤10 Pa,满足极限真空度的要求。根据公式(2)进行抽气时间复算,真空获得系统可在1.5 h内将容器抽至所需压力,满足抽气时间要求。 真空系统需能实现罐体不同高度下压力的恒定维持与调节,在舱体上配置真空规,真空泵组与舱段之间配备可调阀门。真空规负责测量容器内的当前真空度并反馈到控制系统,压力控制系统根据反馈结果来控制调节阀门的开度,通过抽气与进气的平衡从而实现指定压力值或者指定上升速率的调节与保持。 真空罐体配有洁净的复压系统,试验完成后使用洁净空气复压至大气压阶段,考虑到过滤器、消音器、挡板阀开度和转角、管道等因素对于充气速率的影响,复压口径采用DN63 mm口径。考虑到复压系统的可靠性、复压速率可调性,复压阀门采用气动挡板阀和手动阀并联的结构形式,当气动阀门故障时也能通过手动阀门复压,确保能够复压开门[11]。为了获得净化的空气及减少复压时的噪音,在进气口上安装空气过滤器和吸收性消音器,过滤器可滤除以3 μ以上的固态颗粒[11-13],吸收性消音器可以降低高频率噪音20 dB。 临近空间等离子体环境控制系统采用本地和远程两种总控制模式,主要实现对真空机获得系统及附属设备的控制和监测,结构如图7所示。 图7 测控系统结构图 该控制系统本地控制选用以S7-300为核心的集散式控制架构,集成于本地控制柜中。通过组态软件实现所有可控设备的本地控制和可测参数的监视。 本地控制主要包括系统内的执行设备、传感器、控制柜。试验现场控制采用模块化设计,系统可独立完成真空系统本地手动控制。在本地控制模式中,通过本地触摸平板电脑进行手动操作控制,来实现对设备的控制,此时,计算机仅用于监视所有参数和设备运行状态。若计算机远程控制出现故障,可以随时切换到本地控制模式,通过控制柜直接对设备进行控制。 远程控制中采用基于现场工业控制通用组态软件的方案与基于通用编程语言自主开发的方案相融合的方式。远程控制以计算机为控制核心,远程计算机与控制柜通过TCP/IP连接。在远程控制模式包括远程自动控制和远程手动控制,通过点击计算机组态画面中的按钮进行控制切换,来实现对设备的远程控制,计算机组态画面中不仅要实现对流程所有参数和设备运行状态的监控,还要实现对要求的试验数据的显示和存储。 测控软件设计包括PLC底层程序的设计和组态软件的设计,软件结构总图如图8所示。 图8 软件结构总图 PLC底层程序采用STEP7进行开发,具备如下功能: 1)实现真空子系统所有可控设备的本地控制和数据采集,具体包括:实现泵组的远程手/自动启停控制功能,并具有泵组的启停、运行状态及故障报警等状态监测功能;可实现调节阀门的开度状态、故障等参数监测功能,并具有阀门的开度控制功能;能实现开关阀门的开关状态、故障等参数监测功能,并具有阀门的开关控制功能;能实现系统内的各种压力、温度、液位、流量等参数监测功能。 2)自动流程软件。按照真空系统工艺流程,完成从粗真空→高真空→系统复压的抽气流程自动控制;设备在自动功能运行前,具备有自诊断功能,对设备状态进行检测并给出结果;设备在自动功能运行时,应具有运行中的状态显示;设备退出自动功能运行时,应保持当前状态不变。 3)联动互锁保护软件。根据真空系统的工艺流程,设置设备之间的连锁保护功能;真空安全巡检采用独立的程序模块,扫描周期10 ms;在异常情况下,连锁保护功包括禁止泵组启动、禁止阀门打开、启动连锁停机等;连锁保护功能具有启动或取消的设置选项;连锁保护具有触发后记录功能。 组态软件在Windows 7操作系统上运行,选用与集中控制相同的软件平台,通过PC机的以太网接口与PLC设备进行数据通信,控制软件需具备多级用户管理机制,通过组态软件可实现所有设备的控制和试验数据的浏览、监视、记录、导出、打印。 组态软件可实现以下人机交互界面: 1)工艺流程画面:根据真空系统工艺流程设计,建立对应的工艺流程画面,可在画面中对每一设备的运行状态和实时数据进行查看。监视系统中各设备的运行状态和试验进程。此外,对于开放了控制权限的设备,可通过画面上的按钮进行控制。 工艺流程画面功能包括:以图像化形式向试验人员展示完整的工艺流程:在工艺流程相应位置以数字的方式显示工艺流程中的传感器数据;在画面中点击可控设备的图元,可对相应设备进行控制,如泵的启动停止、阀门的开启关闭等;对于控制类的操作(如开关阀门、泵启停、修改控制参数等)有弹出确认窗口,点击确认后控制命令下发;在工艺流程相应位置以不同颜色图元显示设备、传感器的状态;对于传感器状态,绿色表示正常,红色表示数据超限报警,报警限值可在画面中设置;对于设备状态,绿色表示运行中,红色表示停止中,灰色表示状态不可知或未上电,黄闪表示设备故障;在画面中进行报警提示,当发生报警事件时,通知试验人员进行应对处理; 2)曲线显示画面:对所有采集的实时数据以曲线的形式显示,支持多条曲线的同时或单独显示,并支持历史数据曲线得出查询。 曲线显示画面功能包括:以曲线形式向试验人员展示某一段时间内的某项数据的趋势曲线;曲线水平坐标显示时间点,垂直坐标显示数据量程与数值;曲线显示界面可以显示所有测量参数的历史及实时曲线,x、y轴范围可调;通过实时数据/历史数据,选择要查看的曲线类型;通过曲线选择下拉菜单选择要查看的曲线数据源;在实时曲线显示中,显示时间为当前时间至之前两个小时; 在历史曲线显示中,显示起始时间、终止时间可通过时间选择插件设置; 通过按住鼠标左键并在曲线画面中拖拽,可放大显示拖拽过程中选中的局部曲线;通过坐标轴快速设置按钮,进行坐标轴平移、时间快捷设置等操作。 3)数据查询画面:建立独立数据询画面,可查询系统的历史运行状态和历史数据,包括查看操作日志,关键历史数据。 4)报警信息画面:在报警信息画面中,显示当前系统产生的报警信息,包括实时报警和历史报警。并可对当前的实时报警进行人工处理。 本文介绍了一种大型临近空间等离子体真空环境模拟技术,该技术克服了传统的空间等离子体研究方法耗资巨大、不可重复利用,且对许多微观物理过程难以进行精确研究的缺点[14]。文中通过分析计算,提供了一种研究试验所需要的真空工作环境设计方案,并详细介绍了模拟系统中的负压容器系统、真空获得系统、压力控制系统、真空负压系统以及控制子系统的功能与组成,同时,对容器机械结构和系统真空获得能力进行了有限元分析和数值计算,进一步验证了本文真空工作环境设计的可行性。试验结果显示,该系统各项指标优良,可以有效减小壁效应在空间等离子体研究过程中的影响[15]。

3 压力控制系统
4 真空负压系统
5 控制系统
5.1 系统结构
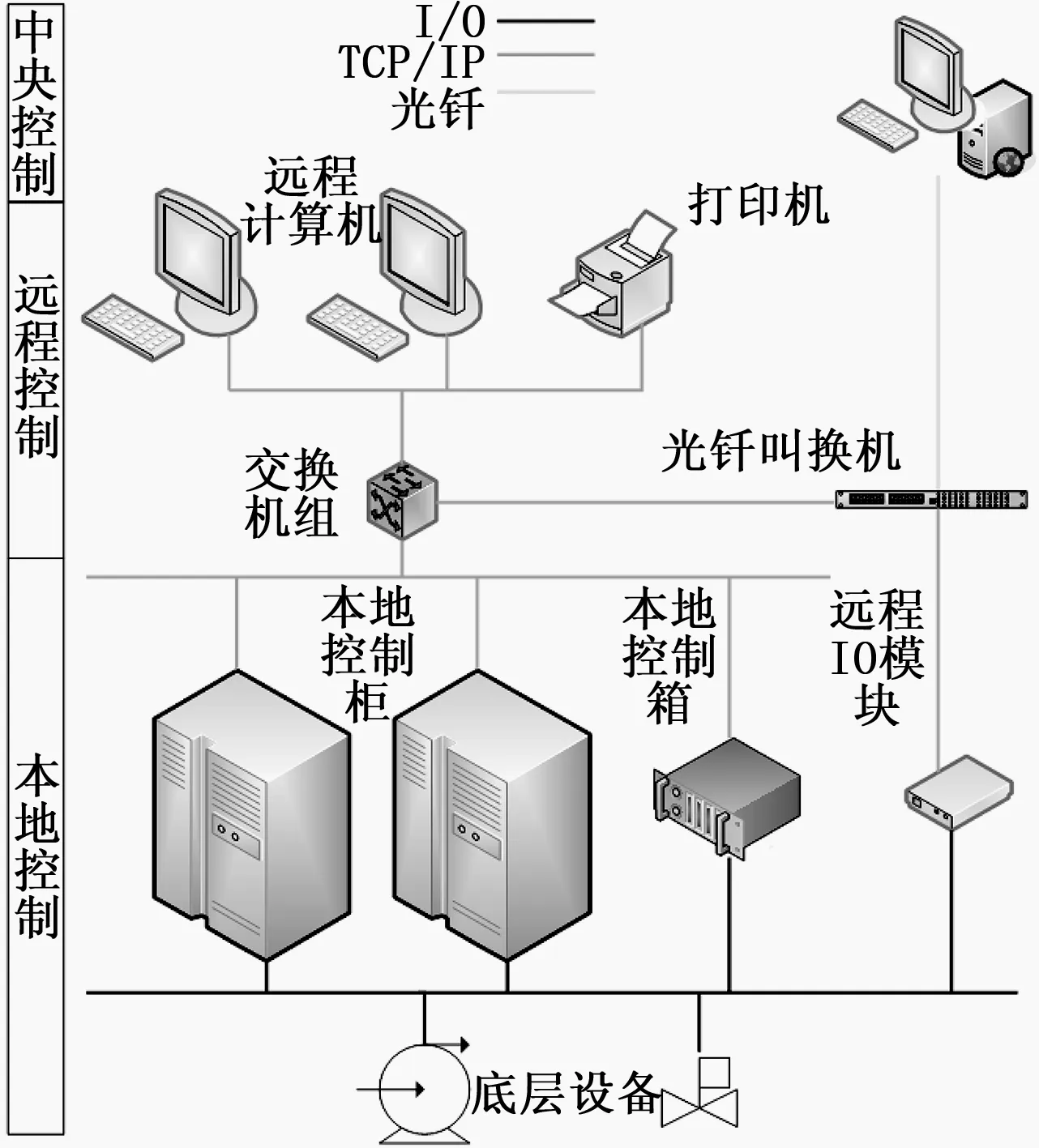
5.2 系统软件

6 结束语
猜你喜欢
中国特种设备安全(2022年8期)2022-11-20
汽车实用技术(2022年11期)2022-06-20
科技创新与品牌(2021年5期)2021-07-16
科技创新与品牌(2020年7期)2020-07-29
汽车电器(2019年4期)2019-05-07
科学与财富(2016年29期)2016-12-27
科技视界(2016年2期)2016-03-30
国外科技新书评介(2014年8期)2014-12-05
