
基于齿轮齿条传动的扑翼无人机
2019-06-25 02:33郝康博
中国科技纵横 2019年9期
关键词:无人机
郝康博
摘 要:扑翼无人机通过模拟鸟类及昆虫翅膀拍动运动获得前进的空气动力,而扑翼拍动运动的驱动机构有多种结构形式。目前,国内外扑翼无人机多采用曲柄连杆结构设计驱动机构,结构形式简单,但左右拍动运动存在一定的相位差,同时伴随有上下拍动运动不对称的设计缺陷,影响飞行器的气动效率和机构稳定性。提出一种基于齿轮齿条传动的扑翼无人机驱动机构设计方案,使扑翼拍动运动获得了较好的对称性和稳定性,并通过原理样机实现垂直起降和悬停飞行。扑翼无人机的设计思路和实验方案,可为设计性能更优的扑翼无人机传动系统提供指导。
关键词:扑翼;无人机;齿轮齿条传动
中图分类号:V43 文献标识码:A 文章编号:1671-2064(2019)09-0086-02
1 研究背景及意义
扑翼无人机仿照自然界鸟类和昆虫的飞行原理,通过扑翼的往复振翅获得前进的推力和升力,与固定翼类和旋翼类无人机相比,在狭小空域内的低速飞行条件下具有更高的气动效率和机动性能。
国外许多研究机构在扑翼无人机研究方面获得一些进展,典型的代表有,荷兰代尔夫特大学的“Delfly”系列携尾式扑翼机[1],美国国防先进研究计划局研制的仿蜂鸟无人机[2]以及德国Festo公司研制的SmartBird扑翼无人机[3]等,都很好地模仿了鸟类和昆虫的运动。而我国在扑翼无人机领域的研究起步较晚,多为仿鸟类的扑翼机,尺寸较大,机动性较差,大多采用曲柄连杆机构驱动,尚无可实现悬停飞行的扑翼无人机。仿昆虫类扑翼无人机的扑动频率高,翼面积小,制造难度高,主要体现在对驱动机构的强度要求和运动性能上。
探索扑翼无人机新型的驱动机构结构形式,提出一种基于齿轮齿条传动的扑翼无人机总体设计方案,为研制先进的可悬停仿昆虫扑翼无人机提供设计参考及技术储备。
2 扑翼无人机方案设计
2.1 总体方案
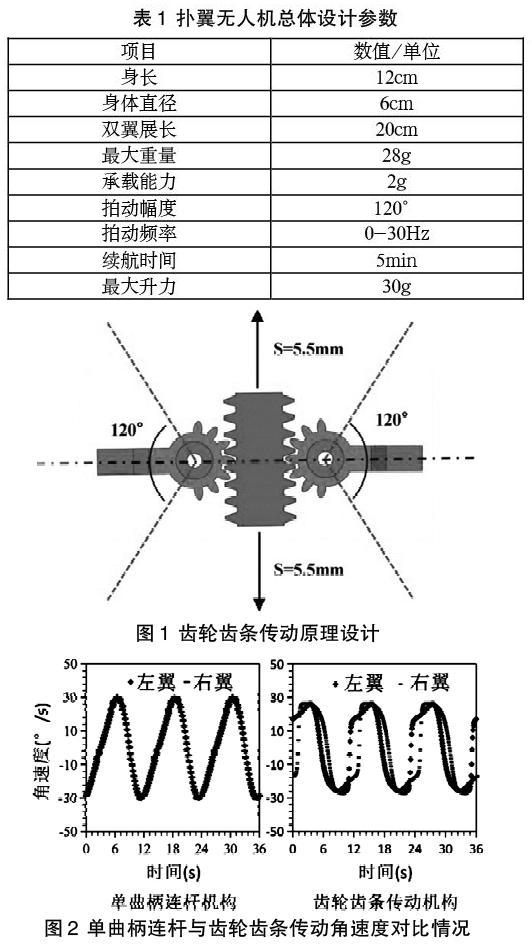
设计一种模仿昆虫翅翼拍动、可实现悬停飞行的扑翼无人机,总体方案包括传动系统、升力系统、动力系统及控制系统等部分,总体方案的主要参数如表1所示。
2.2 传动系统原理设计
扑翼无人机的翅翼拍动幅度设计为120°,采用齿轮齿条传动实现往复拍动运动,设计原理如图1所示。考虑用于驱动齿条直线运动的齿轮(模数0.5,齿数40的齿轮分度圆直径为40mm)偏心距可取范围为1.5mm-8mm,选用模数为0.5的渐开齿设计齿条和齿轮拍动杆,齿条的行程范围设计为5.5mm,可满足120°拍动幅度设计要求。
针对相同拍动幅值、相同拍动频率的单曲柄连杆机构和齿轮齿条传动机构进行运动学仿真,获得其左右翼拍动杆角速度随时间变化曲線如图2所示。单曲柄连杆机构的左右翼运动存在较大的相位差,而齿轮齿条传动机构左右翼的拍动运动完全对称,有利于提高扑翼气动性能和机构的稳定性。
2.3 驱动机构三维建模
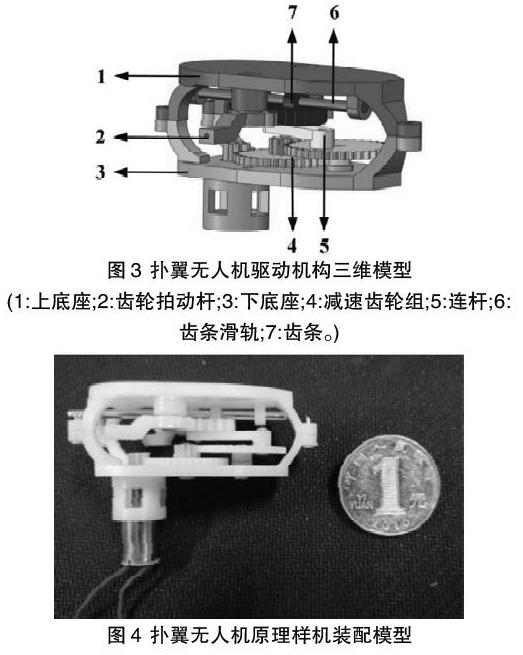
考虑各结构部件的位置和装配关系,在保证结构强度要求的基础上,尽可能减轻驱动机构整结构重量。采用上下分层的结构形式,将齿轮齿条与减速齿轮组进行分离,缩短驱动机构轴向长度,减小结构重量,同时达到载荷分离的目的,有效提高结构强度,驱动机构三维构型如图3所示。
2.4 仿生扑翼制作
影响扑翼气动效率的主要因素有几何形状、展弦比、面积及攻角(由柔性变形决定)等,参照韩国建国大学Hoang Vu Phan等人的设计方案,采用“翅脉+薄膜”结构形式设计仿生扑翼,将碳纤维棒用作扑翼翅脉,塑料薄膜用作翅翼的膜。实验表明,该设计方案可同时满足刚度与柔性变形的要求,最大可获得30g升力。
2.5 原理样机组装
扑翼无人机驱动机构的零部件均采用3D打印技术加工,采用高强度的光敏树脂材料,可获得质量轻、耐冲击的结构部件。齿轮采用标准的工程塑料齿轮,各部件间采用铝质铆钉进行连接,选用额定电压3.7V的空心杯电机提供驱动力,选用微型锂电池提供电力,可满足续航能力要求,装配获得的扑翼无人机原理样机如图4所示。
3 飞行测试
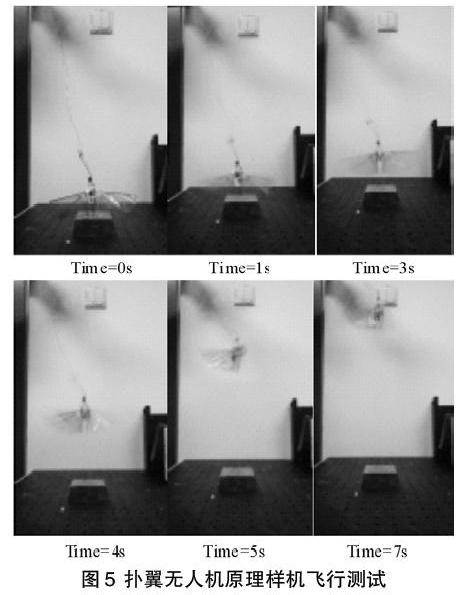
将样机穿过钢丝绳,引导其在竖直方向起飞。通过外部直流电源适配器给电机供电,飞行测试结果如图5所示。实验过程中翅翼拍动运动平稳,驱动机构的结构部件未发生损毁,原理样机可产生足够的升力克服自身重量并以较大加速度竖直上升。可见,基于齿轮齿条传动的扑翼无人机设计方案具有对称平稳的运动特性,且可产生足够的气动力,该结构形式未来可用于研制性能更稳定高效的扑翼无人机。
4 结语
基于齿轮齿条传动提出了一种扑翼无人机总体设方案,并通过原理样机组装飞行测试表明方案可行性。计算分析和实验结果表明,基于齿轮齿条传动的驱动机构相较单曲柄连杆具有更高的运动对称性和结构稳定性,采用该结构形式的扑翼无人机具有较稳定的气动性能。
5 扑翼无人机未来展望
目前,鸟类和昆虫的飞行行为及其力学机理已研究得比较透彻,扑翼无人机的研制难点在于升力机制、驱动机制、控制机制在微型化集成设计的实现上,主要受限于微电子制造技术、仿生材料及微加工工艺等的发展。未来应加强交叉性学科的建设,将相关技术与仿生机理进行有机融合,快速推进实用型扑翼无人机的研制进程。
参考文献
[1] Decroon G C H E,Perin M,Remes B D W,et al.The delfly: Design, aerodynamics, and artificial intelligence of a flapping wing robot[C]// Springer Publishing Company, Incorporated,2015.
[2] M. Keennon, K. Klingebiel, H. Won, A. Andriukov, Development of the nano hummingbird:a tailless flapping wing micro air vehicle, 50th AIAA Aerosp. Sci. MTG, Nashville, January,2012.
[3] Wong B. New Robot Designs Are For The Birds[J].Electronic Design,2011.
