
车厢尺寸测量及定位系统研究
2019-06-24 03:53任伟华高理富谢陈磊郭伟斌
自动化仪表 2019年5期
任伟华,高理富,谢陈磊,3,郭伟斌,江 曼
(1.中国科学院合肥智能机械研究所,安徽 合肥 230031;2.中国科学技术大学科学岛分院,安徽 合肥 230026;3.安徽建筑大学电子与信息工程学院,安徽 合肥 230601)
0 引言
在我国,水泥装袋和传输已经实现了自动化[1],但水泥袋的装车和码放仍需要人工参与。这不仅影响水泥的生产效率,而且在装车过程中产生的高密度粉尘也会严重危害装车工人的身体健康[2]。目前,国外袋装水泥自动装车系统已经足够完善。其主要面向大型水泥厂,集自动生产和装车为一体,呈现集中化、规模化等特点[3]。但国外的这套自动化装车设备不适合我国国情,主要原因如下。一方面,我国水泥厂较为分散,且前期对生产线进行改造已经实现了部分环节自动化,如果全面引进国外的这套袋装水泥自动装车系统,必定会加大资金投入、造成资源浪费[4]。另一方面,在我国,袋装水泥运输车型很多,而国外这套设备只适用于特定的车型,因此也限制了其在我国大型水泥厂的应用。
应某大型水泥厂的需求,在现有生产线的基础上,研发一套适用于各种车型的自动化袋装水泥装车设备。而研发这一设备首先要解决的技术难题是实现车厢尺寸自动化测量及定位。车厢尺寸测量和定位属于三维测量及定位设备的控制技术领域,一般基于三坐标测量机[5]、红外线光幕测量[6]、计算机视觉[7-10]和激光扫描技术[11-13]。
三坐标测量机操作复杂,造价较高,并对工作环境有着较高的要求[14];红外光幕测量和计算机视觉测量系统容易受到外界光线的干扰[15-16],并且实现相机的高精度标定比较困难。鉴于水泥装车车间为半室外环境,光强变化大,现场灰尘严重,再考虑成本,本文采用激光扫描的方法。
本文选用三自由度运动平台搭载一维激光测距传感器,实现车厢尺寸自动化测量和定位。与其他技术方案相比,该方案具有原理简单、测量精度高、抗灰尘、受光照影响小等特点。对货车模型进行验证性试验,结果表明该系统在现场环境中能长期稳定运行。
1 系统构成
1.1 总体结构
基于一维激光测距传感器的车厢尺寸测量及定位系统由一维激光测距传感器、三自由度运动平台、控制系统和上位机四部分组成。车厢的尺寸是指车厢的长度、宽度和深度;车厢的定位是指确定车厢左前端相对于工作车间的停靠位置。一维激光测距传感器经转接板与三自由度运动平台连接。三自由度运动平台在控制系统作用下进行运动,进而驱动激光测距传感器进行相应的运动。
借助组态王开发的上位机界面,具备显示、操作和查询等功能。
1.2 一维激光测距传感器
由于水泥装车车间为半室外环境、光强变化大、灰尘比较严重,因此在选型时要保证激光测距传感器在较高光强时能正常工作,并对现场的灰尘环境有一定防护能力。经反复调研,选用上海誉煊电子技术有限公司生产的激光测距传感器,主要技术参数如表1所示。

表1 激光测距传感器主要技术参数
1.3 三自由度运动平台
该三自由度运动平台由X轴运动平台、Y轴运动平台、Z轴运动平台和X轴辅助导轨组成,采用龙门架式物理机械结构。每个运动平台均包括底座、导轨、丝杆、联轴器和滑台等部分。
以X轴辅助导轨与Y轴运动平台交点作为原点O,构建直角坐标系。坐标系的x轴、y轴和z轴方向分别与X轴运动平台、Y轴运动平台和Z轴运动平台平行,代表长度测量方向、宽度测量方向和深度测量方向。三自由度运动平台结构如图1所示。
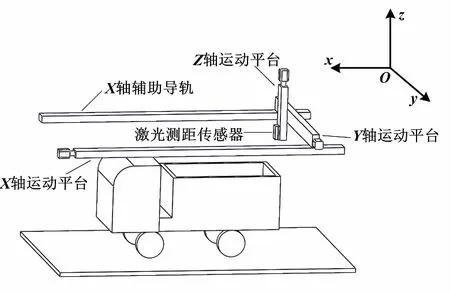
图1 三自由度运动平台结构图
Y轴运动平台两端与X轴运动平台的滑台及X轴辅助导轨固接,沿X轴运动平台作直线往返运动。Z轴运动平台与Y轴运动平台的滑台固接,并沿Y轴运动平台作直线往返运动。激光测距传感器经转接板与Z轴运动平台的滑台固接,并沿Z轴运动平台作直线往返运动。伺服电机的转轴经联轴器分别与运动平台的丝杆连接,驱动运动平台上的滑台进行相应运动。
1.4 上位机界面
本文基于组态王开发了上位机界面。上位机经以太网采用TCP/IP协议与主控制器通信,可以在水泥装车现场较恶劣环境中稳定运行。人机交互界面的作用分为三方面。一方面为用户提供控制接口,用户通过点击启动或复位按钮可以控制三自由度运动平台进行相应的动作;另一方面用来实时显示车厢的尺寸和位置信息以及检测所处的状态;再者可以将历史车辆的相关信息存储在数据库中,方便查询。其中,管理员具有最高权限,可以设置上位机界面的访问权限,具有访问权限的操作员可以进行相关操作。
2 控制系统
本系统主控制器选用西门子S7-200 SMART系列,型号为CPU ST40的PLC。上位机选用联想Y430P,其具有4 GB运行内存、i5-4210M处理器和1 TB硬盘。选用1.2节所述的激光测距传感器测量沿z轴负方向的距离值,并采用其4~20 mA模拟电流输出接口。由于CPU ST40不支持模拟量输入,因此选用西门子扩展模块EM AM03来接收激光测距传感器输出的模拟电流信号。该扩展模块支持0~20 mA模拟电流输入。运动模块选用松下A6系列的伺服电机和驱动器,测量定位系统控制框图如图2所示。

图2 测量定位系统控制框图
主控制器通过RS-485通信口采用Modbus-RTU协议与驱动器连接。其中,主控制器作为主站,X轴驱动器、Y轴驱动器和Z轴驱动器分别作为从站1、从站2和从站3,形成一条Modbus-RTU传输通道;主控制器的数字量输出口与X轴驱动器、Y轴驱动器的数字量输入口连接。主控制器经RS-485通信口和数字量输出口发出控制信号控制伺服驱动器,由伺服驱动器控制伺服电机运动,进而控制三自由度运动平台运动。激光测距传感器以20 Hz的频率采集数据,并将采集到的信号经EM AM03传送给主控制器;同时主控制器在每个扫描周期经RS-485通信口读取X,Y轴驱动器记录的编码器信号。该编码器信号代表X,Y轴电机的位置信息,即激光测距传感器沿长度测量方向和宽度测量方向的位置坐标。
3 车厢尺寸测量及定位原理
3.1 检测原理
将被测车辆停靠在三自由度运动平台下方,并沿长度测量方向运动至待检区域。上位机向主控制器发送控制指令,由主控制器控制X轴运动平台、Y轴运动平台以及Z轴运动平台运动,进而驱动激光测距传感器运动。车厢尺寸测量及定位流程如图3所示。
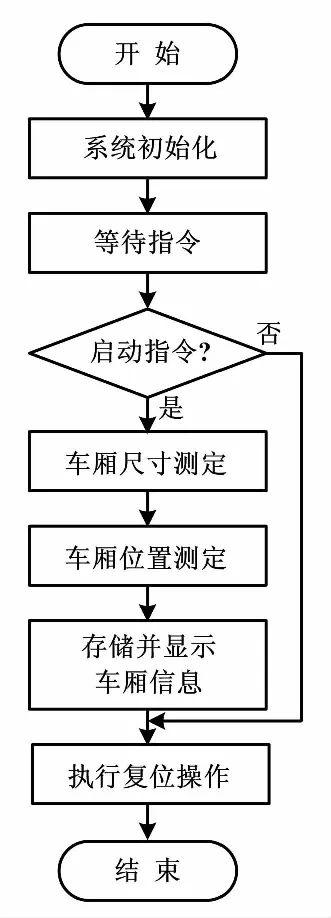
图3 车厢尺寸测量及定位流程图
具体检测流程实施步骤如下。
①系统上电后,主控制器首先完成自检和参数初始化,然后等待上位机指令。
②若收到的指令为启动指令,主控制器控制激光测距传感器沿长度测量方向开始运动,检测车厢长度。在运动过程中,主控制器实时地将激光传感器的测量值及其沿长度测量方向的坐标值传送给上位机,并存储到Access数据库中。若收到的指令为复位指令,则直接跳转到步骤⑤。
③主控制器控制激光测距传感器沿宽度测量方向开始运动,检测车厢宽度。在运动过程中,主控制器实时地将激光传感器的测量值及其沿宽度测量方向的坐标值传送给上位机,并存储到Access数据库中。
④上位机对数据库中测距值和坐标值进行分析,得到被测量车辆车厢的长度、宽度、深度以及停靠位置,并由上位机界面进行显示。
⑤执行复位操作,使激光测距传感器运动至原点处。本次检测完毕,等待下次检测。
3.2 车厢长度测量
车厢长度测量如图4所示。

图4 车厢长度测量图
由图4可知,a点表示在车厢尾部挡板处的采样值,b点表示在车厢头部挡板处的采样值。记车厢长度为L,则有:
L=x2-x1
(1)
3.3 车厢宽度和深度测量
车厢宽度和深度曲线如图5所示。

图5 车厢宽度和深度测量图
由图5可知,c点表示车厢右侧挡板处的采样值,d点表示车厢左侧挡板处的采样值,e点表示车厢底部右端的采样值,f点表示车厢底部左端的采样值。记车厢宽度为W、车厢深度为H,则有:
(2)
3.4 车厢位置测量
记车厢位置为点P,由图4和图5可知,车厢在工作车间的停靠位置为P(x2,y2)。
4 结果分析
所选用的三自由度运动平台尺寸为(1 000×1 000×200)mm,通过控制Z轴运动平台运动使激光测距传感器至地面距离为930 mm。作为前期验证,采用货车模型进行试验,所采用的货车模型车厢尺寸为(295×270×80)mm,停靠位置为(625mm,600 mm)。将货车模型固定在上述位置,进行10次测试,实际测量值如表2所示。
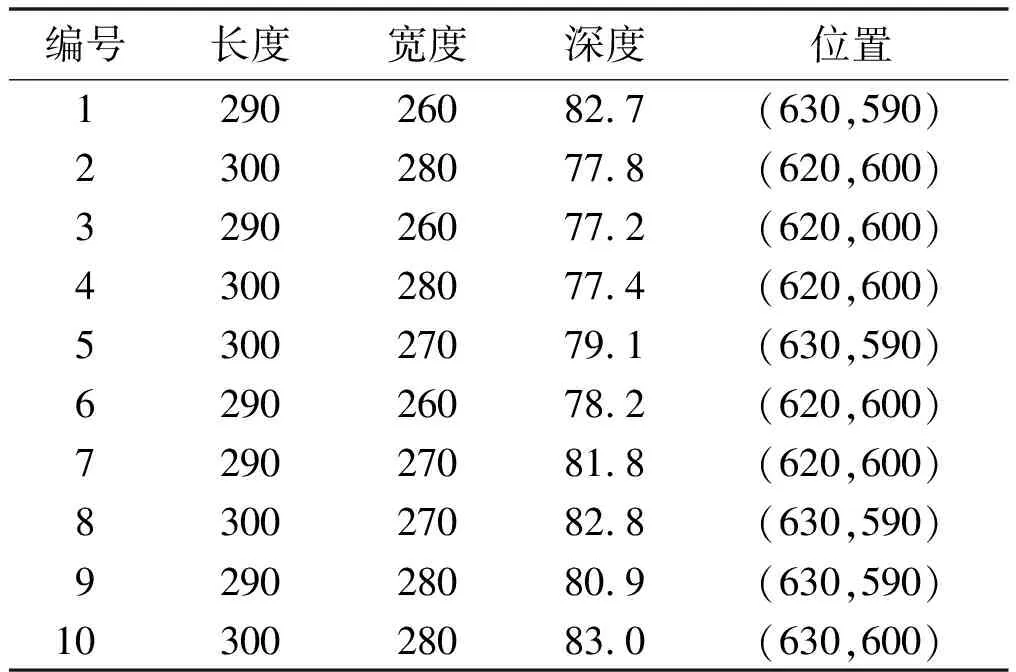
表2 实际测量值
从表2计算可得,货车模型的尺寸测量及定位偏差如表3所示。由表3可知,该系统在长度、宽度和深度上的最大测量绝对偏差分别为5 mm、10 mm、3.0 mm。尺寸测量相对偏差小于3.8%,验证了该方案的可行性。
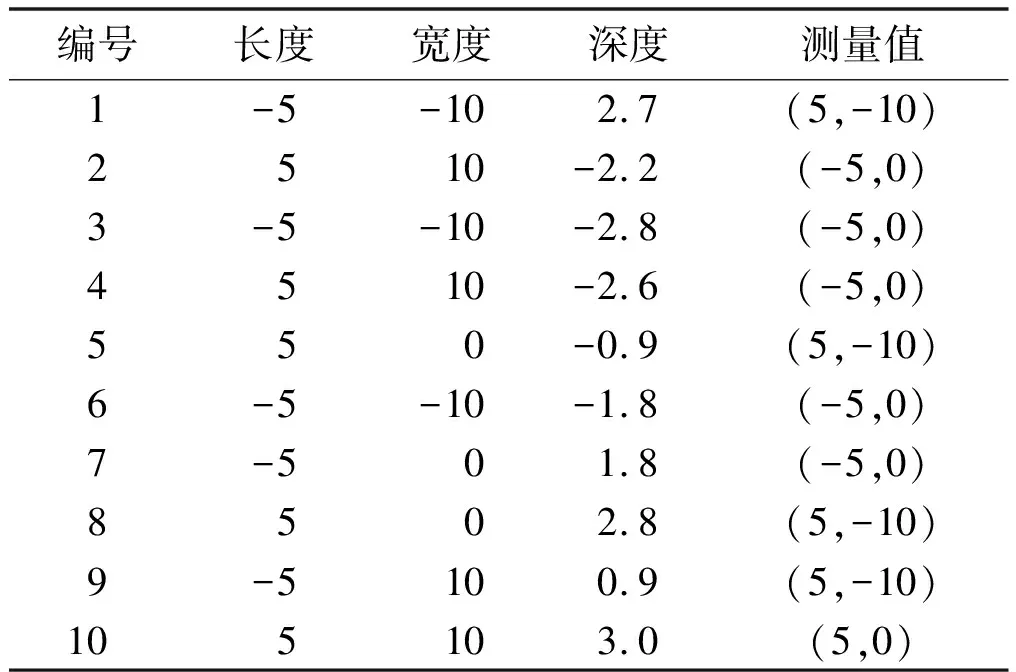
表3 实际测量偏差
对于车厢定位偏差,为了使试验结果更直观,采用欧式距离来衡量,计算公式如下:
(3)
式中:i=1,2,…,10;(xo,yo)为车厢实际停靠位置测量值,(xi,yi)为车厢停靠位置测量值;D为测量位置到实际位置的欧式距离,代表定位偏差。车厢定位偏差分布如图6所示。从图6可以看出,定位绝对偏差最大为11.2 mm,满足需求。

图6 车厢定位偏差分布
5 结束语
本文采用基于三自由度运动平台搭载一维激光测距传感器的方法,实现车厢尺寸自动化测量和定位。该系统通过控制三自由度运动平台,实时采集激光传感器位置坐标及其测距值,并将相关数据经以太网传送给上位机,存储在数据库中。对数据库中数据进行处理,获得车厢的长度、宽度、深度以及停靠位置,并基于组态王开发了上位机界面,便于用户操作和数据显示。
对货车模型进行试验。试验结果表明,该系统在灰尘严重、光照强度大的半室外环境中能稳定运行,可以很好地完成车厢尺寸测量和定位任务,并且整个测试结果准确度高、重复性好。系统由于采用一维激光测距传感器,有效地简化了测量定位原理和复杂算法的运算。
猜你喜欢
四川文学(2020年11期)2020-02-06
当代水产(2018年8期)2018-11-02
车迷(2018年12期)2018-07-26
制导与引信(2017年3期)2017-11-02
山东工业技术(2016年15期)2016-12-01
电脑知识与技术(2016年7期)2016-05-19
专用汽车(2016年9期)2016-03-01
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31
汽车维修与保养(2014年7期)2014-04-18
