
基于BP神经网络模糊PID的主动悬架控制研究
2019-06-24 12:28
制造业自动化 2019年2期
(南京理工大学 机械工程学院,南京 210094)
0 引言
汽车悬架是一个非常复杂的非线性系统,能够传递作用在车轮和车架之间的一切力和力矩,缓冲由路面不平引起的汽车振动,以保证车辆平顺行驶[1]。随着社会的发展,传统的被动悬架由于无法根据汽车的行驶状态和路面情况的变化而改变,已经不能够满足当今人们对乘坐舒适性和操纵稳定性的要求,汽车主动悬架应运而生[2]。相比于被动悬架,主动悬架能够根据路面情况和汽车运行状态实时调整悬架作动器的主动力优化汽车的振动特性[3],逐渐成为汽车悬架领域中研究的热点之一。主动悬架控制算法的设计是主动悬架系统中的核心问题,目前,已有许多学者对汽车主动悬架做了大量的控制研究,但是以往对主动悬架减振控制的研究[4~6]大多基于简单的线性化数学模型,或者只建立整车的1/4模型,与实际物理模型有较大的差别,研究结果不能完全反映真实情况。
为了能够建立比较准确的汽车模型,近年来多体动力学仿真软件ADAMS得到了广泛的应用,它能够建立较为详细的机械模型,同时通过ADAMS/Controls模块还能与控制软件MATLAB、EASYS等进行联合仿真,为车辆的性能分析提供了新的方法。目前对主动悬架控制策略的研究主要有随机线性最优控制、预瞄控制、神经网络控制、自适应控制、模糊控制、鲁棒性控制和PID控制等[7]。主动悬架系统是一个复杂的非线性系统很难用精确的数学模型来表示,而模糊自适应控制器正是基于对象模型不确定且具有非线性的复杂控制系统而设计,再结合PID控制器,可形成能够在线修改PID控制器参数的模糊PID控制器。在模糊系统设计中,模糊规则的制定一般由经验丰富的专业人员给出,因而控制系统的好坏取决于专业人员对问题认识的深度和综合能力。但是并不是所有的问题都可以被归纳总结为明确的规则,这时我们可以利用神经网络技术直接从原始数据中归纳出若干规则,并用语言的方式表示出来,从而建立起一套行之有效的决策规则。为了对专家规则进行优化,本文提出了一种具有自主学习能力的BP神经网络模糊PID控制算法。
本文以某SUV作为研究对象,利用ADAMS/Car模块建立整车动力学模型和随机路面道路模型;然后在MATLAB/Simulink中建立模糊PID控制器和BP神经网络模糊PID主动悬架控制器;接着通过ADAMS/Controls模块与MATLAB的接口将建立的整车模型输入到MATLAB中;最后进行ADAMS和MATLAB联合仿真,分别研究模糊PID控制器和BP神经网络模糊PID控制器减振效果。
1 整车建模
1.1 建模假设
汽车的实际物理模型涉及零件众多是极其复杂的,但是在使用多体动力学软件ADAMS对其建模时需要对某些部分进行简化,例如只需要建立部件的基本外形而不考虑部件的实际形状,部件与部件之间的连接只需保证连接形式正确即可而不用建立复杂的连接关系等。同时阻尼和柔性体等也难以建立准确的动力学方程,有时还会影响仿真结果的准确性,因此对汽车模型进行适当的简化是非常有必要的。因此,在建模过程中对实际物理模型做出如下假设[8]:
1)簧载质量看作一个刚体,不考虑其实际结构;
2)除阻尼、弹簧、橡胶元件和轮胎外,其余零件均看作刚体,不考虑变形;
3)各运副之间的摩擦力忽略不计;
4)使用线弹性橡胶衬套来模拟刚体之间的柔性连接。
1.2 建模参数确定
使用ADAMS软件对整车进行建模时需要关键硬点坐标、刚体部件质量和转动惯量、弹性部件特性参数以及悬架参数等。获取这些参数的途径一般有[9]:关键硬点的坐标根据图纸查得;运动部件的质量与转动惯量通过计算或实验的方法获得;起缓冲减振的零部件,如减振器、弹簧、橡胶元件和轮胎等的特性参数通过实验测得;悬架参数由设计图纸查得或通过实车测得。表1为模型中影响运动特性的主要参数。
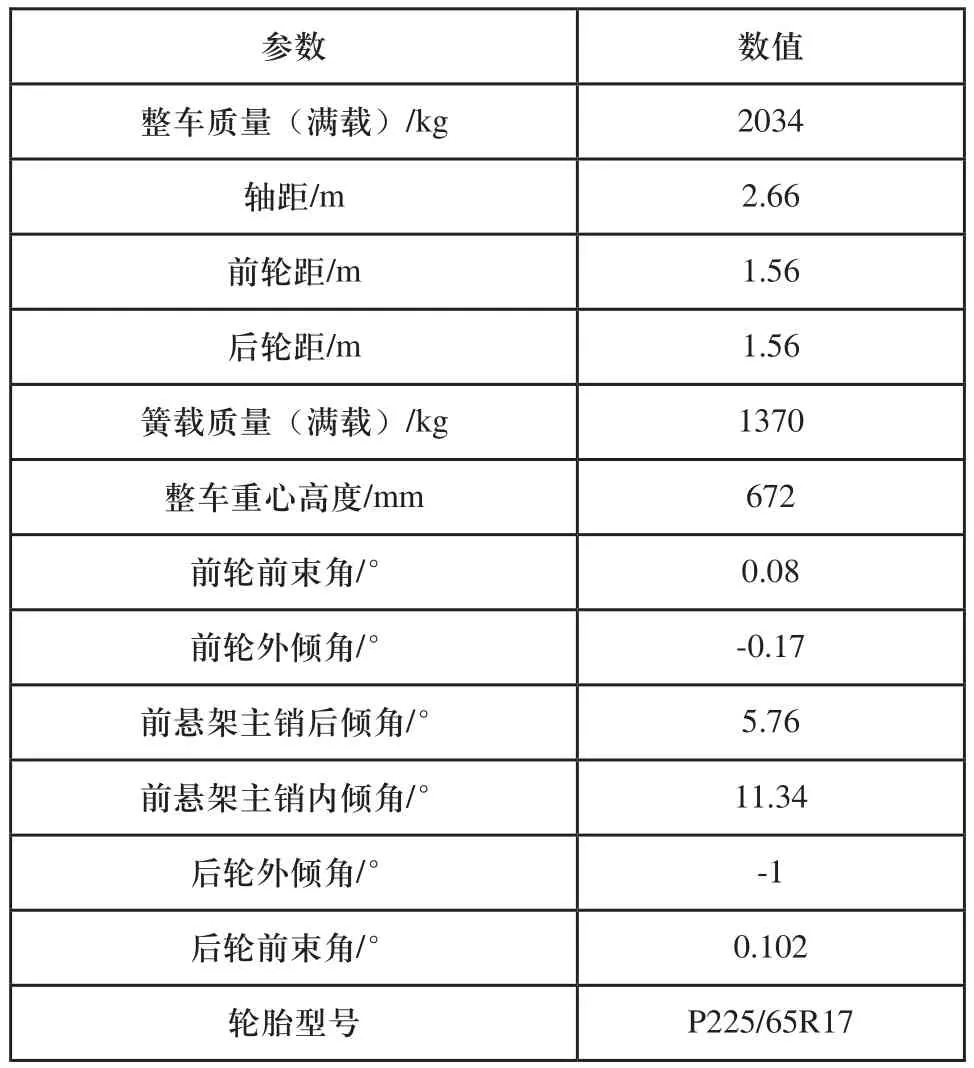
表1 建模主要参数
1.3 整车模型建立
本文利用ADAMS建立某SUV整车模型,其主要由麦弗逊独立前悬架、多连杆独立后悬架、齿轮齿条转向机构和四轮盘式制动装置等组成。首先在ADAMS/Car专家模块中建立麦弗逊前悬架、多连杆后悬架、前后轮胎、齿轮齿条转向机构、车身、动力系统、四轮盘式制动系统模板;然后在ADA-MS/Car标准模块中使用前面建立的模板文件生成相应的子系统;最后在标准模块中通过通讯器把生成的子系统和整车标准试验台组装成整车ADAMS模型,所建立的整车模型如图1所示。
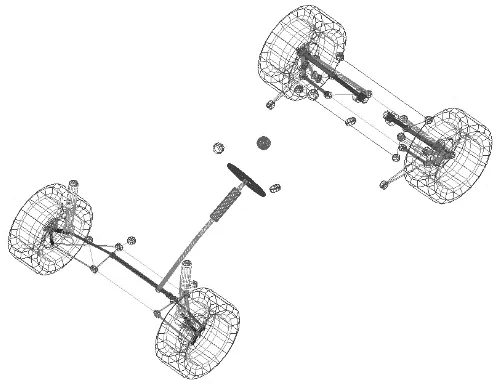
图1 整车模型
1.4 路面模型建立
不同等级路面之间的区别主要在于路面粗糙程度的不同,一般用路面不平度系数Gq来表示。根据国际标准化组织在ISO/TC1-08/SC2N67文件中提出的“路面不平度表示方法草案”,可将路面功率谱密度表示为:

式中:n为空间频率,n0=0.1m-1为参考空间频率,Gq为路面不平度系数,w为频率指数,通常取值为2。
车辆行驶时不仅需要考虑路面不平度还要考虑车速带来的影响,因此需要使用时间频率来代替空间频率。使用u表示车速,则空间频率n和时间频率f之间的关系可表示为:

则可以将式(1)改写为时间谱密度Gq(f),其表达式为:

式中:G0=Gq(n0)n02为路面不平度系数,其取值范围随路面等级的不同而不同。
我国根据功率谱密度将路面分为A到H8个不同等级,表2给出了部分等级路面不平度系数的取值范围。
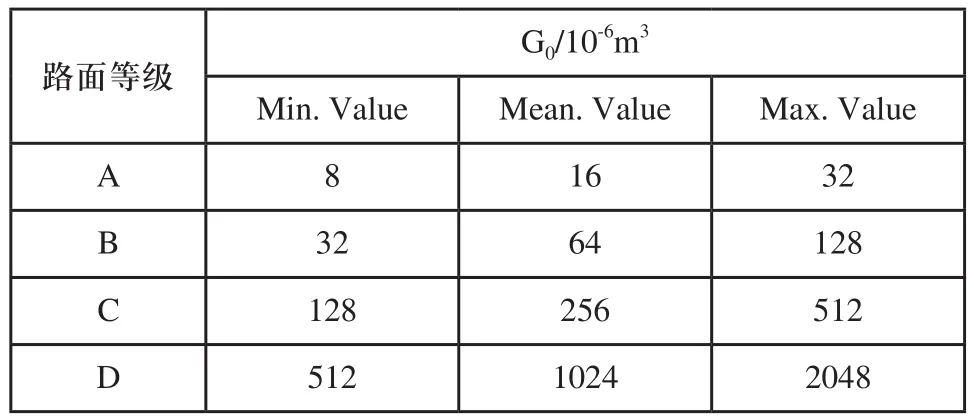
表2 部分等级路面不平度系数
2 控制方法
2.1 模糊控制
模糊控制(Fuzzy Control)是近些年来新兴起的一种智能控制,它由模糊化、知识库、模糊推理和解模糊四部分组[10]成,具有无需建立被控对象的数学模型、易于对非线性系统进行控制、动态性能好、结构简单、鲁棒性强和较强的抗干扰能力等优点[11],非常适用于多变量、时变、非线性的汽车主动悬架系统。
2.2 模糊PID控制器
模糊PID控制器是一种将模糊控制和PID控制结合的双模控制形式,这种控制方法可以同时结合两种控制方法的优点能够很好的消除误差,增加稳态控制性能[12]。模糊PID控制器由模糊控制器和PID控制器两部分组成。
模糊PID控制器的设计主要包括两个方面:模糊控制器设计和确定PID控制器的初始参数,其中模糊控制器的设计主要包括选择模糊语言变量、确定模糊语言隶属函数、确立模糊规则。本文建立的PID控制器以减振器振动速度v和理想参考输入v0(v0=0)的差值E为输入,以作用在减振器两端的主动力F为输出;模糊控制器为两输入三输出结构,两输入为减振器振动速度v和理想参考输入v0(v0=0)的差值E及其变化率EC,三输出为PID控制器的三个参数增量ΔKp,ΔKi,ΔKd。模糊PID调整方法用数学方程可表示为:
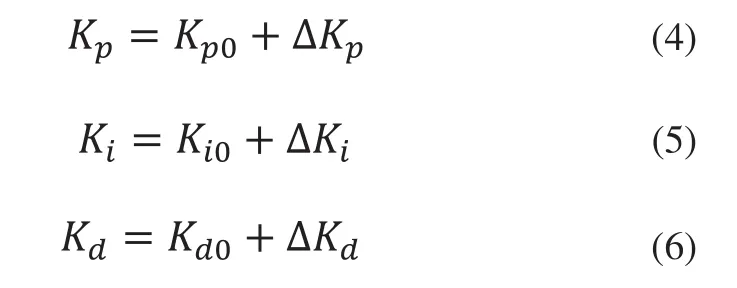
式中:Kp、Ki、Kd为模糊控制调整后的参数,Kp0、Ki0、Kd0为PID控制初始参数,ΔKp、ΔKi、ΔKd为模糊控制输出增量。
通过参数整定得出PID控制器初始参数Kp0、Ki0、Kd0分别为1000、1000和50,模糊控制器输入、输出变量均采用7个模糊子集[NB、NM、NS、O、PS、PM、PB]来描述,它们依次对应于“负大”、“负中”、“负小”、“零”、“正小”、“正中”、“正大”,共形成49条模糊规则。通过被动悬架仿真得出本文中输入变量E的论域为[-0.6,0.6],EC的论域为[-40,40];三个输出变量的论域均为[-3,3];输入量和输出量均采用三角形分布隶属函数;模糊推理采用Mamdani法;解模糊采用重心法。依据前面的设计理念,在MATLAB中搭建相应的模糊PID控制器,其结构如图2所示。
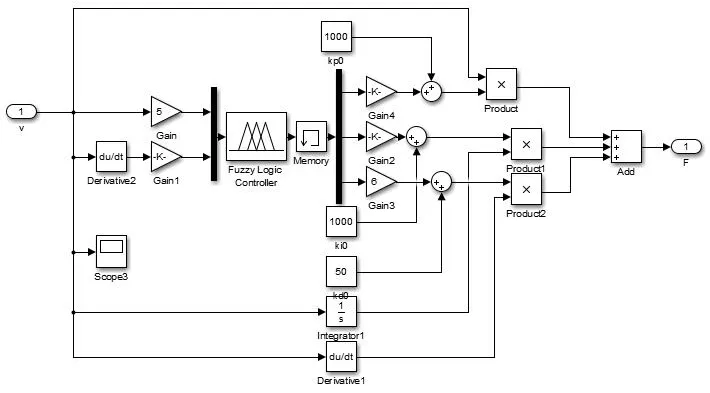
图2 模糊PID控制器
2.3 BP神经网络模糊PID控制器
神经网络能够处理难以用模型或者规则描述的系统,其本质是非线性系统,能够实现任何非线性映射,误差反向传播神经网络又名BP(Back Propagation)神经网络,是目前应用最为广泛的人工神经网络模型[13]。一种BP神经网络模糊PID控制器结构如图3所示。
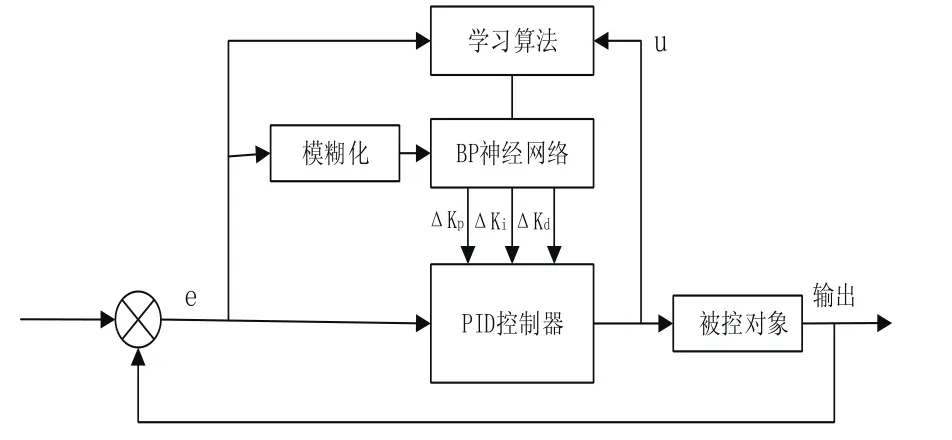
图3 BP神经网络模糊PID控制器结构
控制器由传统PID控制器、模糊化模块和BP神经网络三部分组成[14]:传统PID控制器为基础控制,对被控对象进行闭环控制;模糊化模块对系统的状态变量进行模糊化处理,生成能够被BP神经网络直接利用的数据;BP神经网络通过线下训练生成以加权系数表示的模糊规则。
本文设计了三个BP神经网络,分别用于调整PID控制器的三个参数增量ΔKp,ΔKi,ΔKd,其中每个BP神经网络都具有如图4所示的结构。
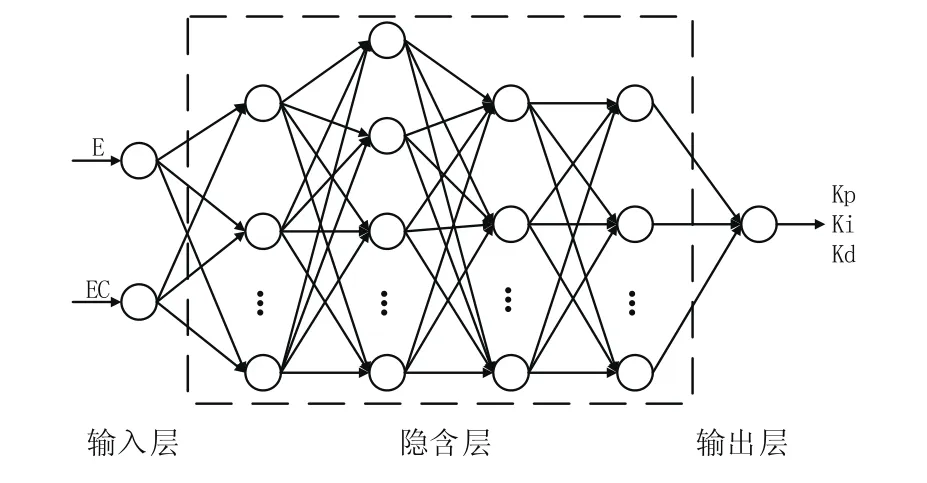
图4 BP神经网络结构图
该网络输入层有两个神经元,分别对应于差值E和其变化率EC;隐含层有4层,第一层隐含层有7个神经元,分别对应于输入的7个模糊子集,第二层隐含层有49个神经元,分别对应于模糊PID控制中的49条模糊规则,第三层隐含层有14个神经元,为了加快收敛速度,第四层隐含层有7个神经元,分别对应于输出的7个模糊子集;输出层有一个神经元,分别对应于PID控制器的三个参数增量ΔKp,ΔKi,ΔKd。隐含层的活化函数均采用tansig函数,输出层的活化函数采用purelin线性函数,训练周期为10000,学习速率为0.05,训练目标为0.0005。将基于工程实践和专家经验的模糊规则表使用提出的BP神经网络进行离线训练,得出输入与输出间的非线性函数,然后用于构建BP神经网络模糊PID。图5为在MATLAB中建立的BP神经网络模糊PID控制器。
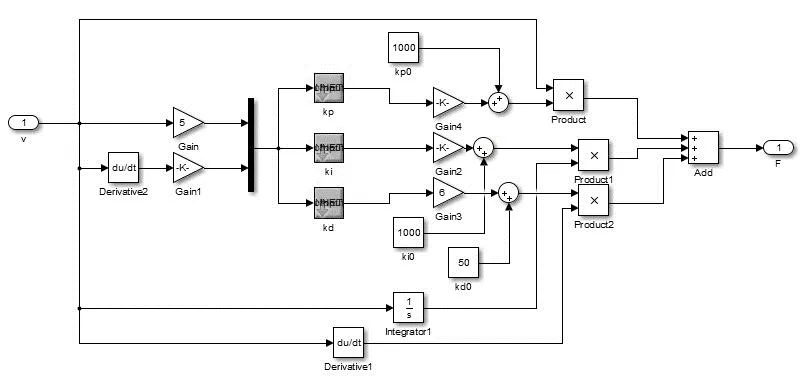
图5 BP神经网络模糊PID控制器
3 ADAMS-MATLAB联合仿真验证
3.1 联合仿真模型建立
本文使用ADAMS建立整车动力学模型,使用MATLAB设计控制系统实现主动控制,为了联合这两个软件进行仿真,需要分别对它们进行相应的设置。首先需要在ADAMS整车动力学模型中建立相应的输入输出变量,输入输出变量联系两个软件实现信息之间的相互流动,在ADAMS/View中分别定义前、后悬架减振器上下端点连线方向的速度差为输出变量,定义沿减振器轴线方向的作用力为输入变量;再设置MATLAB仿真步长与ADAMS一致,即0.005s;最后通过ADAMS/Controls模块将整车动力学模型输出到MATLAB中进行联合仿真。模糊PID控制器和BP神经网络控制器联合仿真模型均如图6所示。

图6 联合仿真模型
3.2 结果分析
使用ADAMS-MATLAB联合仿真,假定仿真车速为100km/h在C级路面直线行驶,设置仿真步长为0.005s,仿真时间为10s。分别使用模糊PID控制和BP神经网络控制两套控制系统进行联合仿真,将仿真结果文件(.res)导入到ADAMS/PostProcessor后处理模块,绘制结果曲线。选取车身加速度、悬架动挠度、轮胎动变形作为评价指标,得到如图7~图9仿真结果曲线。
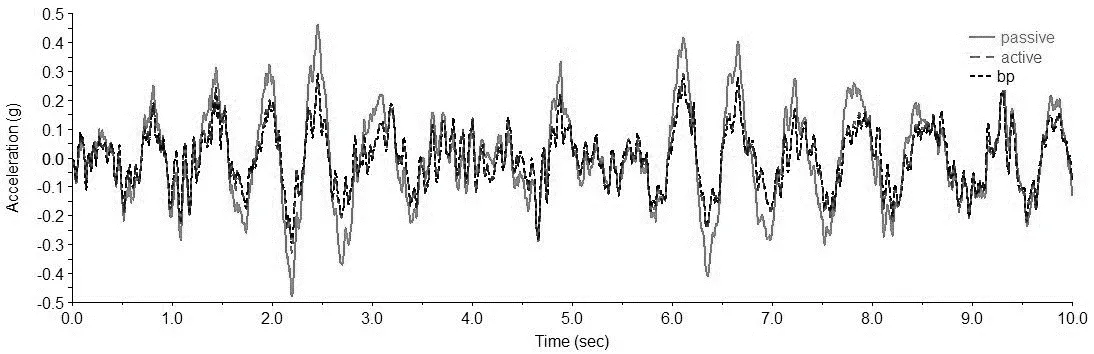
图7 车身加速度
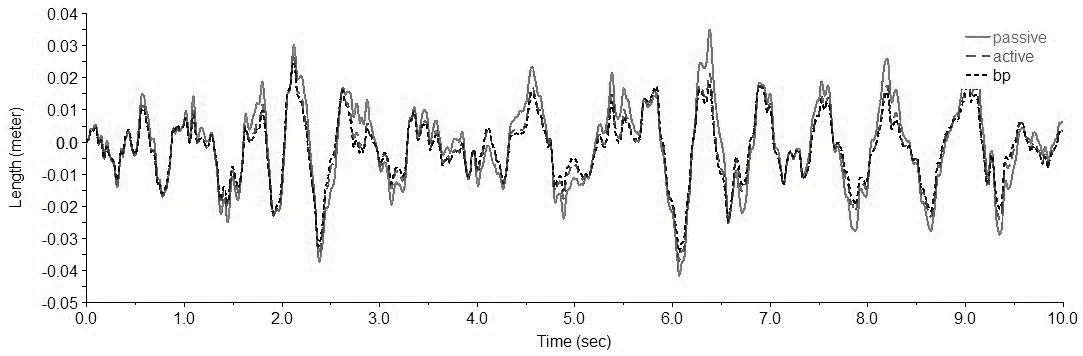
图8 悬架动挠度
图9 轮胎动变形
从联合仿真结果中可以看出:相比于被动悬架系统,采用模糊PID控制和BP神经网络模糊PID控制的主动悬架系统车身加速度、悬架动挠度和轮胎动变形均得到一定程度的减小,表明所设计的两种主动悬架控制系统均能够抑制整车的振动,提高汽车的平顺性和乘坐舒适性。

表3 悬架性能指标均方根值
为了更加清晰地对比两种控制器控制效果,对以上图形进行处理得出各个曲线的均方根值,悬架性能指标均方根值如表3所示。从表3中可以看出:相比于被动悬架,模糊PID控制的主动悬架车身垂直加速度、悬架动挠度和轮胎动变形分别降低了34.3%、19.1%和10.4%;BP神经网络模糊PID控制的主动悬架车身垂直加速度、悬架动挠度和轮胎动变形分别降低了36.3%、25.1%和12.0%。分析结果表明:采用模糊PID控制和BP神经网络模糊PID控制的主动悬架系统均优于被动悬架系统,它们均能够抑制整车的振动,提高汽车的平顺性和乘坐舒适性;本文提出的BP神经网络模糊PID控制器具有更加优异的控制效果。
4 结论
本文利用ADAMS软件建立了某SUV整车动力学模型,同时在MATLAB中设计了主动悬架BP神经网络模糊PID控制器和模糊PID控制器,最后通过ADAMS软件中的Controls模块连接两个软件进行联合仿真。仿真结果表明,本文提出的BP神经网络模糊PID控制策略优于模糊PID控制和被动控制,可有效改善汽车的平顺性和乘坐舒适性。由于建立的模型相比于其他形式的模型更加接近于实际的物理模型,该研究方法可以为汽车设计提供一定的思路。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
煤气与热力(2021年12期)2022-01-19
电子制作(2019年13期)2020-01-14
消费导刊(2018年10期)2018-08-20
北京汽车(2016年6期)2016-10-13
汽车实用技术(2015年8期)2015-12-26
汽车实用技术(2015年8期)2015-12-26
客车技术与研究(2014年1期)2014-03-20
筑路机械与施工机械化(2014年4期)2014-03-01
汽车维护与修理(2014年10期)2014-02-28
