
基于变权TOPSIS法的防空目标威胁评估方法*
2019-06-24 08:40:48王思远张家瑞
弹箭与制导学报 2019年6期
王思远,王 刚,张家瑞
(1 空军工程大学研究生院, 西安 710051;2 空军工程大学防空反导学院, 西安 710051)
0 引言
目标威胁评估是地面防空作战指挥控制的重要环节,是确保防空作战指挥环节中进行有效资源分配的前提条件,也是指挥员作战指挥决策的重要依据。针对地面保卫要地的防空作战具有战术对象较多、协同关系复杂、机动性强、对抗性强、战场态势变化较快的特征,使得地面防空威胁评估领域的不确定性不断增加。在未来的防空作战中,针对要地防空的威胁评估将成为极为重要的环节。
多目标同时来袭时,进行有效的威胁评估是比较困难的,目前使用的方法有多属性决策法、层次分析法、灰色关联法、支持向量机、贝叶斯网络、模糊算法等[1-5]。传统的地面防空指控系统中的威胁评估方法大多是基于当前目标状态,采用常权法确定指标权重,随着来袭目标的状态发生变化,例如做出相应机动等,指标的量化值将会发生改变,这时一些经过量化的指标将处于边缘状态,其对最后的结果会起到决定性的作用,而其他的指标则被过分忽视,会得到状态失衡的常权综合结果,因此需要在综合过程中引入变权思想,使权向量做到动态调整[6-7]。文中提出了一种基于变权TOPSIS法的要地防空威胁评估模型,综合考虑进攻方的动态变化情况和我方的防御能力,权向量可以根据时间线上各指标的状态达到动态调整,使得威胁评估结果具备一定的实时性,更加可靠合理。
1 目标威胁评估体系及隶属度函数
威胁评估体系的建立是研究威胁评估问题的前提[8],通常情况下,威胁指标的选取应该符合完备性、科学性、有效性、无关性、一致性等原则[9],在此基础上对相关指标进行选取与量化,进一步计算其威胁度。
影响要地防空作战中来袭目标威胁程度的因素有目标类型、目标速度、目标与保卫要地间的距离、飞行高度、航路捷径、飞临时间等[10-11],这些因素之间存在相互关联,例如目标距离、目标速度和飞临时间可由其中的任意两个因素计算得到第三个因素。在实际的防空作战中,敌我双方的信息彼此未知,作为防御方,主要依靠战前的先验知识和战时的多传感器探测来得到关于进攻方的信息。文中结合战场实际情况,主要从目标作战能力与攻击意图两大方面来考虑目标的威胁度评估,具体的指标如图1中的目标威胁评估体系所示。

图1 目标威胁评估体系
1.1 目标作战能力
1)目标类型
在要地防空作战中,空袭目标的类型往往决定了目标的作战能力和进攻方式,不同种类的来袭目标对我方保卫要地造成的威胁不同,例如弹道导弹速度快、威力大且不易拦截,其威胁度要远大于以侦察、干扰及简单攻击为目的的侦察机或直升机[12-13]。根据以往防空作战的实际情况[14],对来袭目标的类型进行量化分类,得到目标类型的威胁度量化值u1,如表1所示,其中数据由专家打分方法得到。
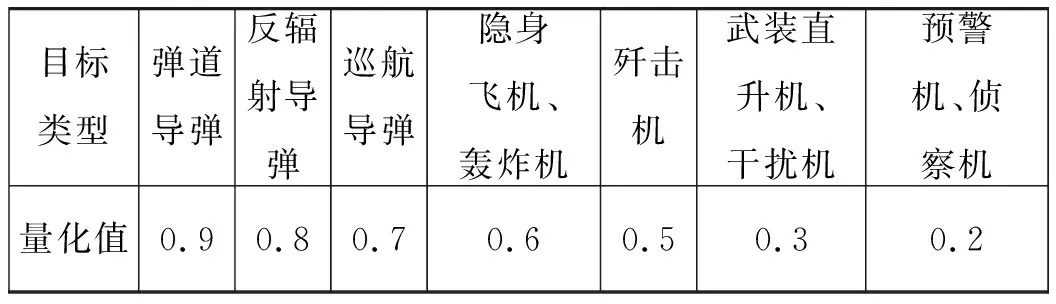
表1 目标类型威胁度量化值
2)电子干扰能力
空袭方在进攻时为了增强其突防能力,往往会对我方雷达进行电子干扰攻击,加大我方雷达搜索和跟踪难度。因此,目标的电子干扰能力也是判断目标威胁程度的重要指标[15],其量化值u2如表2所示。

表2 目标电子干扰能力量化值
3)速度
空袭目标的速度对防守方雷达跟踪的精度和稳定性有着很大的影响,高速飞行的目标可能会使得雷达跟踪不稳定甚至丢失目标,从而降低后续武器系统对其的杀伤概率。通常情况下,来袭目标的飞行速度越快,其突防能力就越强,对我方的威胁程度就越高。目标的速度威胁隶属度函数可表示为:
(1)
由于目标一般为飞机、火箭、导弹等航空航天飞行器,因此目标速度的单位选择为Ma。目标速度大于5Ma时为高超音速飞行物,目标威胁最大;目标速度小于1Ma时,为亚音速飞行物,威胁较小;当速度为1~5Ma时,是超音速飞行,目标威胁度随着速度值的增加而增大。kv是对应的增益系数,一般取典型值kv=-0.8Ma-2。
1.2 目标攻击意图
1)剩余时间
剩余时间指空袭目标在当前速度与方向下,到达我方火力单元的发射近界的时间,这是衡量目标威胁与目标攻击意图的一个重要指标。一般情况下,来袭目标的剩余时间越短,拦截武器成功拦截目标的概率就越低,对防守方的威胁程度就越大[16-17];目标对于不同要地的剩余时间也可以在一定程度上反映出目标的攻击意图。这里采用偏小型降半正态分布函数来表示目标剩余时间的隶属度函数:
u4(t)=e-ktt2
(2)
式中:kt=4×10-6s-2。
2)高度
由于地面地形的遮挡,当目标在低空飞行时,我方雷达的发现概率将显著降低。一般情况下,空袭目标的飞行高度越低,对我方的威胁程度就越大。飞行高度的威胁隶属度函数也可以利用类似的降半正态分布函数表示为:
(3)
式中:h为高度,单位为km,hd取1 km,即认为飞行高度低于1 km的目标威胁最大;kh是对应的衰减参数,一般取kh=1 km-2,可以反映出目标攻击意图的变化趋势。
3)机动特性
对于一般的空袭导弹及飞机,在飞临目标要地一定距离时会采取相应的战术机动,通常情况下为先爬升一定高度进行攻击目标寻找与确认,之后是俯冲进攻战术动作。因此,当雷达发现目标在一定距离范围内机动时,其威胁度也会随着机动动作的不同而发生改变,相关的量化值u6如表3所示。

表3 目标机动特性量化值
4)航路捷径
目标的航路捷径反映了空袭目标的攻击企图和威胁程度。如果目标航路捷径远远大于目标的攻击范围,目标的威胁程度就会很低。当保卫要地在来袭目标的攻击范围内时,航路捷径越小,说明要地越可能是其攻击的目标,该来袭目标的威胁度就越高,攻击意图就越明显[18]。目标航路捷径的威胁度隶属函数可以用中间型半正态分布函数表示为
u7(p)=e-kpp2
(4)
式中:目标航路捷径p的单位是km;kp反映了目标的攻击威胁范围,一般取kp=5×10-3km-2。
2 基于变权TOPSIS法的威胁评估方法
2.1 目标威胁评估决策矩阵归一化方法
假设要地防空中,来袭目标个数为m,目标集合可以表示为M={M1,M2, …,Mm},选取的指标个数为n,指标集合可以表示为U={U1,U2, …,Un}。根据前面的分析,文中选取的目标威胁评估指标共有7个,分别是:目标类型、电子干扰能力、速度、剩余时间、高度、机动特性、航路捷径,目标Mi的某项威胁评估指标Uj下的量化值为xij,则目标的初始决策矩阵可以表示为X=(xij)m×n。
在初始决策矩阵中,目标的各项指标的量纲、数量级不同,无法对其直接进行下一步的决策分析。因此,首先需要对初始决策矩阵X进行归一化处理,得到标准决策矩阵Y=(yij)m×n,方法如下:
指标为成本型:
(5)
指标为效益型:
(6)
式中:成本型指标为数值越小、威胁度越大的指标,具体包括:剩余时间、高度、航路捷径;效益型指标为数值越大、威胁度越大的指标,具体包括:目标类型、电子干扰能力、速度、机动特性。在文中,选取的7个指标经过上文的方法量化后均变为效益型指标。
经过归一化处理后得到标准决策矩阵Y,作为下一步构造变权重决策矩阵的基础。
2.2 基于变权理论确定指标权重
变权理论是相对于常权而言的。在传统的权值威胁评估评价体系中,各指标的权重在一定程度上反映了其影响总威胁度的相对次序,然而当实际中各指标的量化值发生变化时,各权值仍是维持在初始值,这样将会得到不合理的评估结果。在变权评价指标体系中,指标的权重会随着指标状态值的变化而产生相应的变化,这可以将基于前面时刻状态的预测在当前时刻的威胁评估中加以体现。
变权理论首先由我国学者汪培庄创立,在此基础上李德清进一步提出了变权综合决策模型,并定义了惩罚型与激励型变权向量[19]。在线性可加综合评估模型中,综合函数可表示为[20]:
Si=Wi(u)·Ui=
(7)


2)连续性。wij(u1,u2, …,un)关于自变量uj(j=1,2, …,n)连续。
3)惩罚性与激励性。若对于每个j(j=1,2, …,n),wij(u1,u2, …,un)均为关于uj的单调不增或减函数,那么称W(u)是以u=(u1,u2, …,un)为惩罚或激励机制的变权向量。
变权综合方法中的一个重要环节就是如何构造状态变权向量,一般借助均衡函数来获得状态变权向量T(u)=(T1(u),T2(u),…,Tm(u))。T(u)除满足上述条件外,还应该满足归一化的Hadamard乘积:

(8)
变权理论的前提是已经知道各项指标的常权。常权重通常体现了决策者的偏好,也可以在一定程度上反映出各项指标彼此间的相对重要性,权重较大的指标对于最终的威胁评估结果的影响较大。因此,对于常权重相对较大的指标,惩罚或激励程度也要相应加大。
在要地防空作战中,当来袭目标的某一个指标因素量化值过低时,即使其先前确定的常权重很大,其综合威胁度依然会很小。以剩余时间为例,当目标飞临时间很大时,意味着目标距离防卫要地还有很长一段距离,即使探测到目标,其可能仍在我方防空武器火力范围之外,所以该目标暂时对我方不构成严重威胁。同理,当某项指标量化值过高时,即使其常权重很小,其综合威胁度仍会显著上升。因此,在威胁评估过程中需要根据指标的量化值对权重做出相应的调整,激励量化值较高的指标权重,而惩罚量化值较低的指标权重。
对于单个指标因素来说,可以发现当单一指标量化值较低时,其整体威胁度会显著降低。以航路捷径为例,当目标航路捷径很大时,其相应量化值很小,目标的整体威胁度较低。但是,当单一指标的量化值较大,而其他属性值处于常规水平时,目标总体威胁度并不会显著上升。例如当航路捷径较小时,其量化值较大,假设其他指标不发生很大变化,那么目标的整体威胁度不应该发生很大的提升。因此,应该使目标状态变权向量的惩罚幅度大于激励幅度。
依据上述变权理论,可以在常权的基础上得出威胁评估变权决策所需要的各指标的变权向量。首先根据专家主观赋值法确定各指标的常权,此时权值是固定的、非动态的;然后通过分析各指标因素的变化情况对不同目标威胁程度的影响关系来确定惩罚与激励机制,最后根据上述分析和相应条件,进一步构造出状态变权向量表达式:
(9)

2.3 基于TOPSIS法的威胁度求解
在得到目标变权重之后,采用TOPSIS方法进行威胁评估。TOPSIS(technique for order preference by similarity to an idea solution)是多目标决策分析中的一种有效方法,又称为优劣解距离法,其基本思想是在对原始数据构成的矩阵进行归一化处理的基础上,排序比较相同因素下的各项值,组合得到其中的最优解和最劣解,然后分别计算每一种方案与最优解和最劣解之间的距离,从而得到各方案与最优解的接近程度,这就是评价各方案彼此优劣关系的依据[21-26]。步骤如下:
1)对于m个来袭目标,根据上述指标的隶属度函数,分别计算n个指标因素的量化值,构造目标初始决策矩阵X,并根据成本型与效益型指标归一化方法,将X进行归一化处理,得到归一化后的标准决策矩阵Y=(yij)m×n;
2)根据专家系统确定目标的各个指标的常权重W,分别由式(9)和式(8)得到状态变权向量矩阵T=(tij)m×n和变权重矩阵W=(wij)m×n;
3)由标准决策矩阵Y和变权重矩阵W确定变权重决策矩阵V=(vij)m×n,其中vij=yij·wij;
4)确定最优解V+与最劣解V-
(10)
5)计算每个目标的各个指标属性值到最优解与最劣解之间的距离
(11)
6)计算每个目标威胁度与最优解的接近度,接近度越大则威胁越大。
(12)
7)根据接近度越大则威胁越大原则,按接近度由大到小顺序排列目标,得到排序后的目标威胁度序列。
3 实例验证
假设在某次要地防空作战中,有5个来袭目标对我方保卫要地进行空袭,经过战场传感器搜寻、跟踪、确认等环节后获取目标的信息如表4所示。
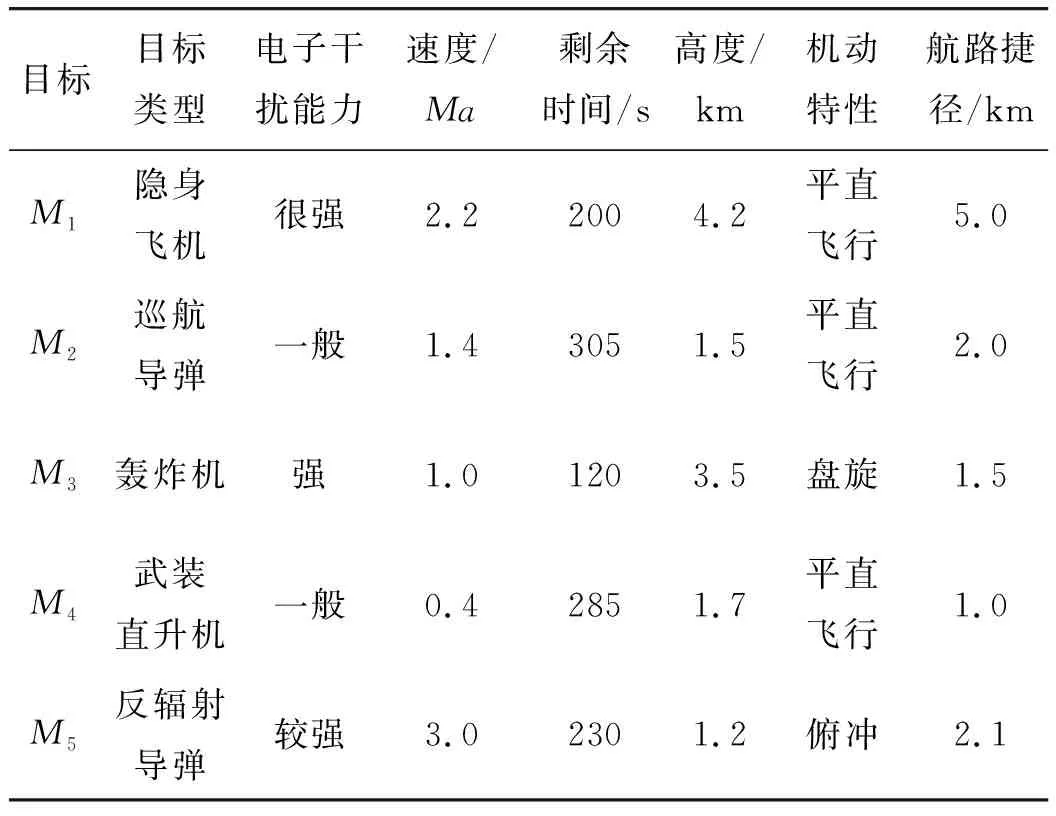
表4 来袭目标信息
1)根据各指标隶属度函数的量化处理方法,计算目标各指标因素的量化值,得到目标初始决策矩阵X为:
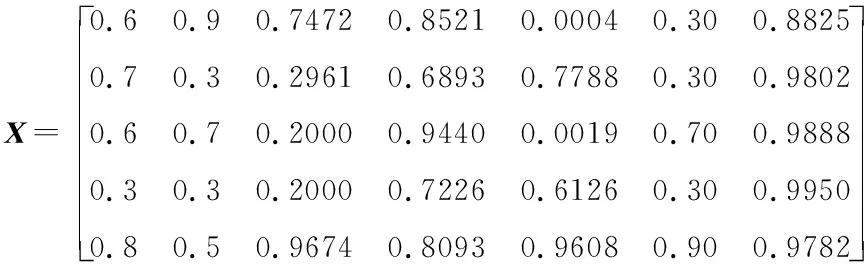
对X进行归一化处理,得到标准决策矩阵Y为:

2)常权向量Wi(u)=(0.2,0.1,0.1,0.2,0.1,0.2,0.1)由专家主观赋值得到,根据式(9)计算得到状态变权向量矩阵T:

根据式(8)计算得到变权重矩阵W为:

3)计算得到变权重决策矩阵V为:
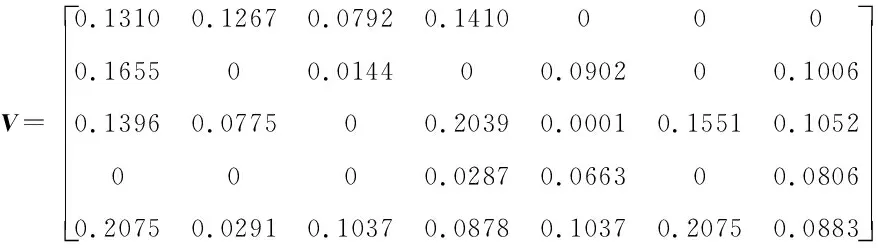
4)确定最优解V+为:V+={0.207 5,0.126 7,0.103 7,0.203 9,0.103 7,0.207 5,0.105 2}
最劣解V-为:V-={0,0,0,0,0,0,0}
7)计算得到目标威胁度序列:M5>M3>M1>M2>M4。
根据以上实例,变权重方法下目标威胁度排序为:M5>M3>M1>M2>M4;若依旧采用上述的TOPSIS排序法,但在常权重情况下,得到的来袭目标威胁度排序为:M5>M1>M3>M2>M4,可以看出二者差别主要体现在目标1与目标3的威胁度顺序,其他目标的威胁度排列无较大变化。结合实际情况分析发现:目标3的电子干扰能力、速度等指标量化威胁度结果均小于目标1,但目标3的到达剩余时间很小,说明此时目标3已经十分接近地面保卫要地,无论目标3的携载、干扰、速度能力如何,都已经对要地形成了巨大威胁,威胁度排序应将其置于目标1之前,计算结果体现了这一点。因此,在TOPSIS排序法中引入变权理论后,通过惩罚与激励机制使得评判过程中实现了权向量的动态调整,评估结果更重视有较大影响的指标而适当忽略影响较小的指标,威胁度评判结果更加贴近实际。
4 结论
根据要地防空作战的特点,结合来袭目标的实际情况,建立了以目标作战能力与目标攻击意图为主的威胁评估体系,并构建了隶属度函数对目标的7个具体指标进行量化处理;然后利用变权理论,通过惩罚与激励机制构造状态变权向量,进一步得到目标的变权向量,对各威胁指标的权值实现动态调整,使其随着目标状态的变化而变化;最后,结合TOPSIS排序方法,通过计算与最优和最劣解的距离得到威胁度序列。这种基于变权TOPSIS的要地防空威胁评估方法在评判过程中充分考虑了目标状态变化对权值所带来的影响,使得结果更加合理,为下一步的目标分配等环节提供了重要依据。实例仿真验证了该方法的合理性与正确性,通过调整隶属度函数与状态变权向量表达式中的相应参数值,可以满足不同条件下的决策要求,使得该方法具有较强的适应性与灵活性。
猜你喜欢
装备制造技术(2020年9期)2021-01-26 00:14:34
文苑(2019年24期)2020-01-06 12:06:38
意林·全彩Color(2019年8期)2019-09-23 02:12:28
系统管理学报(2018年2期)2018-08-13 01:04:28
重庆文理学院学报(社会科学版)(2017年5期)2017-10-23 01:30:23
文苑(2016年32期)2016-11-26 10:30:48
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电测与仪表(2016年3期)2016-04-12 00:27:46
海军航空大学学报(2015年3期)2015-11-11 17:18:49
中学历史教学(2015年11期)2015-11-11 07:09:09
