Kinect深度摄像机在振动测量中的应用
2019-06-21 07:13严慧敏何炳蔚
装备制造技术 2019年4期
严慧敏,何炳蔚
(1.福建信息职业技术学院 机械工程系,福建 福州 350003;2.福州大学机械工程及自动化学院,福建 福州350108)
0 引言
随着现代工业和现代科学技术的发展,对各种仪器设备的振动和噪声提出了更高的要求,同时对主要生产过程和重要设备进行监测和诊断,对工作环境进行控制等,这些都离不开振动的测量。目前常用的振动测量方法有接触式测量和非接触式测量两种,接触式测量指的是测量仪器直接接触被测物体的表面,一个很大的不足就是只能获取有安装传感器位置的数据[1],这样就需要在被测物体表面安装多个传感器,当被测物体表面形状复杂或者工作环境恶劣的情况下存在极大的不便,对操作人员的技术经验要求也较高,而且还可能会给工件表面带来损伤。虽然随着计算机技术的引进,一部分接触式测量的自动化水平得到一定的提高,但是测量复杂程度以及环境条件适应能力并没有得到较好的改善。用机器视觉测量是常用的非接触式测量方法,具有连续性、非接触、维度高等优点,由于非接触式测量不需要直接接触物体的表面,可以保护工件表面质量,广泛应用于动态测量和在线监控等方面。机器视觉技术的测量系统主要包括CCD测量系统和激光测量系统等,可获得较精确的测量数据,但激光测量系统操作复杂、成本高;CCD测量系统容易受光照条件的影响,而且测量数据要依赖于标记点,无法获得没有做标记点的位置的振动信息,在需要多点测量或局部面测量时,需要通过多次测量完成,降低了测量效率。要想获得振动表面所有点的振动数据虽然可以采用三维数字图像相关性方法[2-3],但该方法要求被测物体表面要经过抛光或者精加工来提供所需的对比相关图像,操作复杂、成本高。所以研究适合于动态测量中精度高、效率高、抗干扰能力强的测量系统,以适应恶劣的生产条件所带来的测量复杂程度,是振动测量的一个重要方向。
本文基于Kinect深度摄像机的散斑测距技术原理和采样频率,研究将其应用于物体表面振动数据的测量,实现不借助标记点即可进行实时测量物体表面任一点三维振动信息的目标。
1 实验原理与方法
1.1 测量原理
Kinect是微软在2010年正式推出的XBOX360体感周边外设,包含三个摄像头,中间是RGB彩色摄像头,左右两边的镜头分别是红外线发射器和红外线COMS摄像机[4]。Kinect所包含的深度摄像机是基于红外测距技术实现深度测量,只对红外光成像,场景中可见光下的纹理图形不会获取。Kinect的深度摄像机与红外发射器组合构成一个测距系统,深度摄像机获取空间物体表面在相机成像平面上图像坐标信息的同时,可以直接获取物体表面点到摄像机中心的垂直平面的距离。红外线发射器发出一个红外激光散斑阵列覆盖Kinect的可视范围,红外激光点阵遇到场景中物体表面后反射,并由深度摄像机接收成像[5]。但是深度摄像机直接返回给用户的深度距离并不是国际长度标准单位,而是一个视差值d,利用公式(1)[6]可以计算物体表面某一点的深度值。

Zk是指空间点K所处位置的深度值,Z0是参考平面到发射器的距离,d是K点的偏移量,b是基线长度,f是红外摄像机的焦距,Z0、f和b这三个参数在摄像机出厂时就已经标定好了。具体的测量原理如图1所示[6]。

图1 深度摄像机测距原理
为了提高效率,Kinect只测量振动物体表面任一点的深度值,即每个像素对应点的深度信息,每个像素点的图像坐标需利用计算公式(2)[6]和公式(3)[6]转换到相机坐标系下的三维坐标(Xk,Yk,Zk),则

xk,yk为图像中K点的坐标,f是红外摄像机的焦距,x0和y0是坐标原点,∂x和∂y是镜头畸变校正系数,这些参数可通过相机标定获得。
由此可计算物体表面所有点的三维坐标:(Xk,Yk,Zk)。Kinect的采集频率为 30 Hz,即每隔 1/30 s测量一次,实时获取振动物体表面深度的变化信息。
1.2 实验方法
根据Kinect深度摄像机的测量原理,实验用一台UTG1402数字信号发生器产生稳态低频正弦波,信号经过YE5872功率放大器放大,驱动SINOCERAJZK-20电动式激振器在悬臂薄钢板末端产生稳态正弦激励,图2为实验装置平台。由于Kinect深度摄像机的采集频率为30 Hz,实验选择的激振频率必须在10 Hz以下才可以实时获取振动物体表面深度的变化信息。

图2 Kinect测量振动实验平台
由于振动测量是动态过程,需要将时间信息融合到Kinect深度摄像机采集的三维数据之中。Kinect采集频率为30 Hz,即每隔1/30 s采集一次数据,选用Windows平台中TimeGetTime多媒体计时器作为实验中的计时器。实验过程中,Kinect深度摄像机每采集一次点云数据,计时器便被触发记录下当前的时刻。测得的数据包含三维空间坐标信息和对应的时间信息,实现了实时记录振动物体表面振动信息的目的,研究者可以实时提取表面任一点的四维振动信息进行数据分析。而且由于Kinect深度摄像机测量过程中无需移动位置,避免了不同时刻下点云配准引起的误差。图3表示提取横截面A上任意点M的四维振动信息。

图3 提取点M的振动信息
实验中对于Kinect深度摄像机与振动板之间的距离选择也是非常重要的,理论上是距离越小精度越高,但实验发现,当距离小于500 mm时,Kinect深度摄像机测量稳定性极差。图4为相同振动条件下,Kinect深度摄像机在不同距离下测得的振动幅值,可以看出当测量距离大于700 mm时,测量稳定性很差,所以实验的最佳测量距离为50~70 cm。

图4 Kinect测量稳定性与测量距离的关系
为了证明Kinect深度摄像机的测量精度,选择了另一种常用的非接触测量方式进行对比实验,对比实验采用的是Bumblebee2双目摄像机进行测量,实验装置如图5所示。Bumblebee2双目摄像机内有两个光轴平行、基线长度为12cm的CCD摄像头,在动态测量时可实现左右相机同时采集图像,当帧频为30 fps时,采集图像分辨率为640×480时,当帧频为20 fps时,采集图像分辨率为1 024×768。在相同振动条件下,比较Kinect深度摄像机与Bumblebee2双目摄像机分别测得的振动数据。

图5 Bumblebee2测量振动实验装置
2 实验数据比较
将不同的频率下Kinect深度摄像机和Bumblebee2双目摄像机多次测量的结果进行比较,表1为Kinect深度摄像机和Bumblebee2双目摄像机在不同频率下分别测得的振幅值,表2为Kinect和Bumblebee2测得的振幅误差和相对误差比。说明在一般精度要求情况下,Kinect深度摄像机和Bumblebee2双目摄像机的测量精度差别不大。图6显示了Kinect和Bumblebee2分别测得的振幅误差值和相对误差比,从图中数据可以看出,当振动频率在10 Hz以下时,随着振动频率的提高,二者之间的振幅误差会有所增大,但误差范围均不超过0.15 mm。

表1 Kinect深度摄像机和Bumblebee2双目摄像机测得的幅值
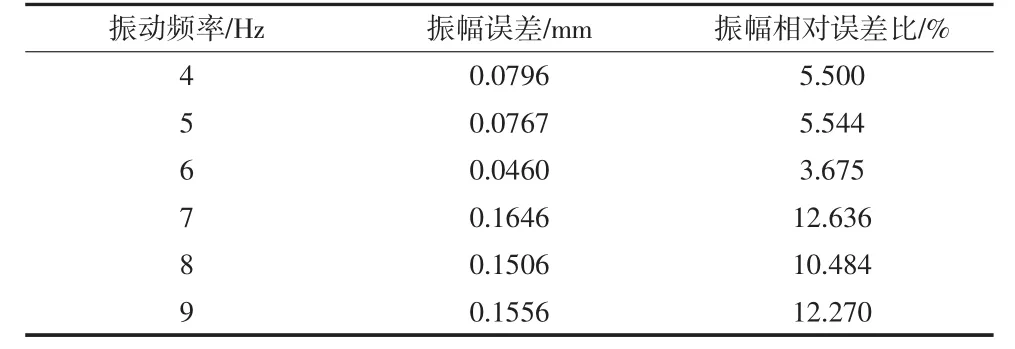
表2 Kinect和Bumblebee2之间的振幅误差和相对误差比

图6 Kinect和Bumblebee2的振幅误差和振幅相对误差比
从测量效率来看,Kinect深度摄像机可以实时获得振动物体表面任一点的振动信息,测量效率高,而Bumblebee2双目摄像机的测点数量取决于标记点的个数,所以当需要测量多点数据时,需要粘贴大量的标记点。比较实验结果表明:对低频振动物体表面进行实时振动测量,Kinect深度摄像机测量有一定的优势。
3 结论
研究实验表明:在动态实时测量振动物体表面振动数据时,Kinect深度摄像机每次拍摄都可获得物体表面上百万个点的深度变化信息,与双目立体测量方法相比,Kinect可实时获取物体表面上所有点的深度值,其测量位置点的数量远远多于传统视觉测量方法,而且Kinect测量时无需在被测物体表面粘贴任何标记点,减少了重复实验的麻烦,环境恶劣的情况下也可测量,大大地提高了测量效率和适应性,而且Kinect深度摄像机的价格比其它非接触式测量仪便宜,测量成本低。综上这些优点,在精度要求不高的低频振动测量中采用Kinect深度摄像机具有一定的优势。
猜你喜欢
青年文学家(2022年10期)2022-04-25
中学生数理化·高一版(2020年1期)2020-02-20
电子制作(2019年20期)2019-12-04
办公自动化(2016年18期)2016-12-17
办公自动化(2016年18期)2016-08-20
现代计算机(2016年11期)2016-02-28
少儿科学周刊·儿童版(2015年2期)2015-07-07
科普童话·百科探秘(2015年4期)2015-05-14
新闻前哨(2015年2期)2015-03-11
智慧与创想(2013年3期)2013-05-09