
四旋翼自主追踪智能车的系统设计
2019-06-20 10:31李金鹏张国恒
电子技术与软件工程 2019年5期
关键词:控制
李金鹏 张国恒

摘要 本文通过无线串口获取到地面智能车传来的实时位置,利用滤波算法提高坐标精度,设计导航算法,从而实现四旋翼快速精准跟踪到地面智能车。
【关键词】四旋翼无人机 控制 自主导航
四旋翼无人机具有结构简单,控制方便等优点,在狭小空间内实现起飞,盘旋,着陆等动作,在通过无线串口获取到地面智能车传来的实时位置,利用滤波算法提高坐标精度,设计导航算法,实现四旋翼快速精准跟踪到地面智能车。
1 总体方案设计
1.1 系统硬件组成
四旋翼无人机呈“X”型结构,由机架、飞控、姿态模块、无刷电机及驱动和无线通信模块、电源等组成,四个螺旋桨分别固定“X”字支架末端,相邻之间的螺旋桨转速相反,抵消所产生的扭矩,智能车以STM32为处理器,搭载GPS模块,将智能车位置坐标发送给四旋翼,实现自主导航。
1.2 系统工作原理
四旋翼飞行器以STM32单片机为控制器,使用MPU-9250对四旋翼飞行姿态的数据进行采集和分析处理,飞控以得到的数据作为输入,使用控制算法调整输出量,通串行总线控制各个电机,使四旋翼向预定姿态无限逼近,完成姿态调整。飞控通过串行总线获得的四旋翼和智能车经纬度坐标,通过算法设计出四旋翼飞行追踪地面智能车的最佳飞行路线,让无人机可以快速追踪目标。如图1为四旋翼自主追踪智能车的系统结构图。
2 硬件的设计与实现
2.1 硬件设计
四旋翼飞行器有四个输入力,有六个状态输出,依靠四个旋翼之间的的速度差实现无人机的悬停、上升、下降、前后飞行、左右飞行、偏航飞行。将获得的导航模块数据进行滤波处理,使四旋翼和智能车的位置坐标进行不同参考系下的转换处理,设计出最优导航路线并实现自主导航。
2.2 姿态测量和导航模块
姿态测量模块集成了陀螺仪、加速度计、磁力计等单元,完成对无人机姿态数据的采集、运算处理。模块根据系统检测到的角速度传感值和加速度的传感值,利用滤波算法进行积分及补偿运算得到的姿态角,减少累计误差,从而使控制系统实现四旋翼飞行器可靠的姿态控制;导航模块主要有惯性测量单元和GPS组成,惯性测量单元不依赖外部信息,不受外部干扰,可以计算车四旋翼的姿态角,但其由于时间的累加,造成的积分误差逐渐增大,精度减小,结合GPS的定位信息进行数据融合,可以互补缺陷,对导航精度及灵敏度起着重要作用。
3 软件设计与实现
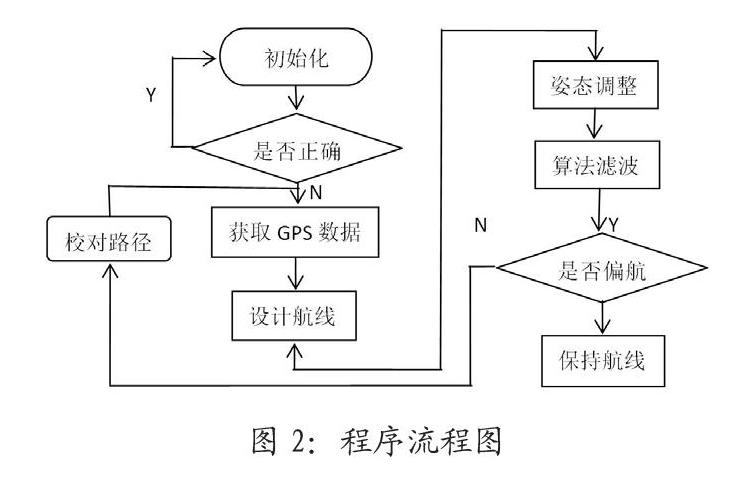
四旋翼飞行器控制系统运用先进的飞行控制算法结合高精度的传感器,使四旋翼的飞行姿态控制稳定。系统上电后,先进行初始化,对端口、时钟进行初始化,对GPS模块、惯性测量单元等进行校准,通过I2C接口获得无人机姿态测量数据和智能车GPS坐标信息,使用卡尔曼滤波算法对数据进行分析处理,对飞行和智能车的位置进行预估。使用经典的PID算法,将惯性单元测量到的的角速度转化为控制信号,计算出四旋翼电机的转速,通过IO口发送给相应电机,使飞行器不断逼近预定的飞行状态。程序流程图如图2所示。
4 结论与展望
(1)本文对四旋翼和智能车的模型的组成和工作原理进行了简单的一个介绍,并对该模型提出了总体设计方案。
(2)对四旋翼导航进行了软硬件的设计,对各传感器的数据采集和分析,采用控制算法实现四旋翼导航。
(3)系统设计完成后,进行了试验,试验还存在许多不足之处,判断方向比较麻烦,无法进行精准导航。
參考文献
[1]丁勇飞.无人机用DGPS/自动驾驶仪/高度表组合导航着陆系统应用研究,1996.
[2]宋英麟,鲜斌,茹滨超,曹美会.无人机微型姿态航向系统数据处理[J].中南大学学报,2013.
[3]向少林.基于互补滤波算法的四轴飞行控制系统设计[J].机电工程,2016.
[4]吴涛,戈惠梅,顾志华.四轴无人飞行器控制系统设计[J].河南科技,2014.
[5]陈自力.无人机-嵌入式控制[M].北京:国防工业出版社,2015.
