
有人/无人协同指控终端界面设计
2019-06-20 10:31李怡伟涂天佳
电子技术与软件工程 2019年5期
李怡伟 涂天佳


摘要 有人/无人协同指控终端是未来有人/无人协同作战的重要装备,简洁高效的协同指控界面设计有助于操作员增快信息辨识度、减小误读率,显著提高作战效能。本文借鉴国外有人/无人协同研究成果,梳理了有人/无人协同指控终端架构,结合无人机控制站设计风格和人机功效设计要求,设计了一款简洁直观的有人/无人协同指控界面,可协助操作员高效地完成协同作战任务。
【关键词】有人/无人协同 协同指控 架构界面
1 引言
无人机因其价格低廉、结构相对简单、生存能力强且无需承担人员伤亡的风险等优点,在近几场局部战争中被广泛应用,其战场优势在现代战争中日趋突出。但由于无人机智能化水平的限制,其还无法独立自主执行复杂的作战任务。通过有人/无人协同作战、平台互操作和共享平台资源,可以使有人/无人平台优势互补,有效提高作战效能。美国国防部《2011-2036无人系统综合路线图》中指出“美国军事中心从中东转移至亚太地区以后,有人/无人编队将成为一种基本作战模式”,进一步强化了有人/无人编队的作战意义。
鉴于有人/无人协同作战的应用前景,美、英等国从20世纪末就开始竞相开展此方面研究,探索有人/无人编队作战概念、关键技术,并通过试验试飞验证有人空中平台协同控制无人机的可行性和实用性。目前,美国陆军已完成多个有人/无人协同演示验证项目,研制了不同协同控制级别的机载协同指控终端,并完成了实际列装。
相比较,国内对有人/无人协同作战的研究尚处于探索阶段,有人/无人协同指控系统设计尚不成熟。而且协同指控终端要部署在有人机上,有人机相比地面控制站,空间小、人员紧张,因此对协同指控终端的重量、体积、资源有更严格的要求,设计难度更大、技术要求更高。本文在总结国外有人/无人协同项目经验的基础上,梳理了有人/无人协同指控终端架构,并结合无人机控制站界面设计风格和人机功效设计要求,设计了一款以“左参数、右任务”为主要风格的有人/无人协同指控界面。
2 国外有人/无人协同概况
有人/无人协同作战源于有人无人组合(MUM-T)思想,该思想出现于20世纪60年代,指有人和无人系统之间为实现共同目标而建立联系,用于描述平台互用性和共享资产控制以获得共同的作战任务目标。美国防部《2013~2038无人系统综合路线图》也定义,有人/无人编队(Manned-Unmanned System Teaming)是指有人与无人系统为执行相同任务而建立的整体编队,通过平臺互操作和资源共享控制,以达成共同的任务目标。
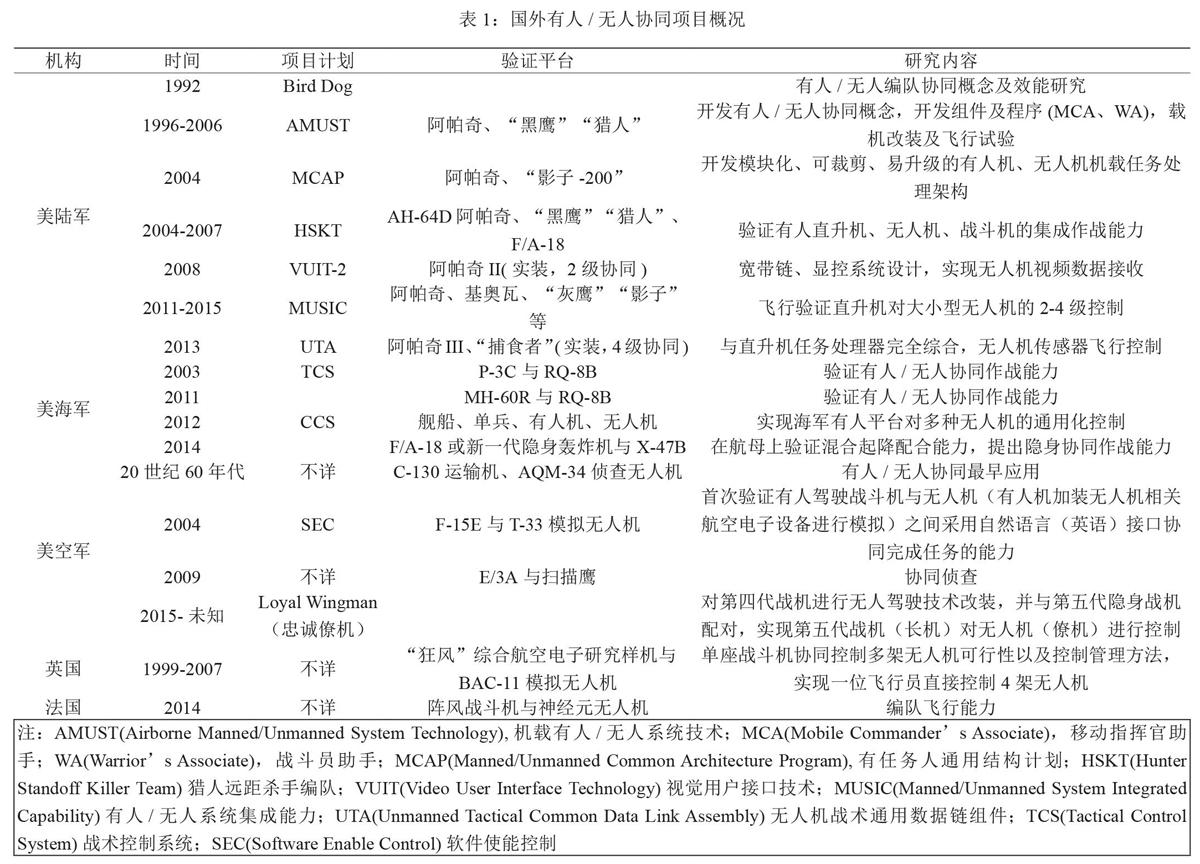
在此目标的驱动下,20世纪90年代起,美、英等国相继开始发起了多项有人/无人协同研究计划,其具体情况见表1。
分析国外有人/无人协同项目研究可以发现,有人/无人协同研究内容主要包含概念探索、有效性分析、技术梳理、系统设计及技术攻关、实验室仿真、飞行演示验证和实装化。其中有/无人协同装备的研发、成熟对推动有人/无人协同技术从仿真到试飞和实装起到关键性作用,如MCA、WA辅助决策助手和VUIT-2、UTA协同数据链。随着有人/无人协同技术的发展,其要求的协同控制能力在不断提升,协同控制实现方式逐渐向异构、多平台互操作发展,对无人机的自主能力要求不断提高。国内在有人/无人协同研究上还有较大差距,应在概念探索、技术研究的同时,大力发展协同装备,加强对有人/无人协同指控终端的研究和设计,探索简洁高效的协同指控终端界面设计思路。
3 协同指控终端设计
3.1 协同指控终端架构
有人/无人协同指控终端相当于安装在有人机上的无人机控制站,其主要功能有两方面:一是通过协同数据链接收无人机状态、载荷、链路信息,并接收有人机、作战指挥中心、航管中心等发送的信息,通过综合数据处理和数据融合,将上述信息在界面上综合显示;另一方面是根据当前态势和作战任务实时地对无人机及其载荷进行任务规划和操作控制。根据有人/无人协同作战要求和交互过程,可知有人/无人协同指控终端架构如图1。
其组成模块和功能如下:
(1)人机交互界面:综合显示无人机状态、载荷、链路、态势等信息,并提供语音、键盘、操纵杆等输入方式,实现高效的人机交互控制;
(2)态势感知模块:通过数据融合模块,将作战指挥中心下发信息以及各载荷侦察信息等清晰地展现在地图上,以指导任务规划;
(3)任务规划模块:根据态势信息和作战任务,对无人机航路、载荷和链路进行规划,以便安全高效地完成作战任务;
(4)飞行监控模块:对无人机飞行姿态、高度、位置等信息进行综合显示和控制;
(5)任务监控模块:对光电、雷达等载荷信息进行显示和控制;
(6)链路监控模块:对链路状态、信道、带宽等信息进行显示和控制;
(7)数据融合模块:对作战指挥中心下发信息以及各载荷侦察信息进行匹配融合,作为态势感知模块的输入,减轻操作员负担;
(8)数据综合处理模块:数据的组帧、解析和分发等
3.2 协同指控终端界面设计
由于协同指控终端部署在有人机上,机上空间小、人员紧张,因此对其界面设计、重量、体积、资源有更严格的要求。一般无人机地面控制站多分为飞行监控台和任务监控台,由不同人员操控,但协同指控终端通常需要由一人完成飞行监控和任务监控操作,因此其设计难度更大、技术要求更高。为在一个显示界面上同时实现飞行和任务监控操作,需要设计高效的数据融合算法和人机交互界面,以及精简的指令集和智能化的辅助决策策略,同时提高无人机的自主水平。
由协同指控终端功能和架构可知,协同指控终端需要监控的信息涵盖飞行、任务、链路、态势等多方面,但显示器尺寸大小有限,单页面无法显示上述所有信息,因此软件需包含一个主界面和多个功能子页面,主界面显示无人机平台部分重要信息、链路状态、态势信息以及载荷下传信息等,并实现任务规划操作;功能子页面分别对应显示协同指控终端架构中飞行监控、任务监控、任务规划和链路监控模块信息,并实现相应控制操作。考虑到态势感知信息与任务规划的相关性,将态势感知模块信息显示在任务规划子功能页,为任务规划提供参考和约束。
由于人们在使用计算机时,对屏幕的视觉注意并不均匀,通常对左上角比较敏感,占40%,右下角最不敏感,占15%,不及对左上角关注的一半,且人们的阅读顺序通常是从上先下、从左到右,因此按照信息重要程度降序排列,其布局位置为左上-右上-左下-右下。同时综合考虑飞行员和操作员“左参数、右任务”的视觉习惯,以及标签栏、工具栏在界面上方的使用习惯,为使其对信息辨识度增快、误读率减小、可靠性提高,并缓解其心理和生理疲劳,得到协同指控终端界面总体布局如图2。
鉴于图表、颜色等形式比文字更形象直观,且不易造成视觉疲劳,本文以有人/无人协同指控终端界面布局为基础,融入图表和颜色设计,设计了图3协同指控界面,界面以“左参数、右任务”为主要风格,整体简洁直观。
主窗口界面组成及功能如下:
(1)标签和状态综合显示栏。位于主界面上部,呈横向长条状。可在主窗口和飞行监控、任务监控、任务规划和链路监控等其他功能窗口之间进行切换(各功能窗口与协同指控终端架构人机交互界面所含内容相对应),查看详细的无人机状态、任务载荷、链路设置、态势等信息,并实现更细致的飞行、载荷控制,完成任务规划功能;
(2)无人机状态显示区。位于主界面左部。用于显示飞行姿态、速度、油量、转速、滑油温度和流量、以及告警等关键信息;
(3)态势及任务规划区。位于主界面右部。用于显示有人/无人载荷信息融合后的态势信息,并可在地图上实现任务规划,形象直观。可与载荷信息显示区对调显示;
(4)载荷信息显示区。叠加在态势及任务规划区上,位于其左下角,可切换显示各个载荷侦查信息。可与态势及任务规划区对调显示。
文章在界面设计过程中,将协同指控终端按照功能进行模块化划分,可根据实际需求集成不同的功能模块,通用化强,并且充分考虑了飞行员的视觉习惯,界面布局以“左参数、右任务”为主要风格,同时融入图表和颜色设计,简洁直观,可增快操作员对信息的辨识度、减小误读率、提高可靠性,并缓解其心理和生理疲劳。
4 结论
本文在概述国外有人/无人协同研究的基础上,梳理了有人/无人协同指控终端的架构,将其功能模块细化,并阐明了各模块之间的交互关系,最后结合无人机控制站设计风格和人机功效设计要求,对有人/无人协同指控界面进行了设计。界面按照功能模块进行集成,通用化强,并且以“左参数、右任务”为主要风格,多采用图表、颜色等元素,不易造成视觉疲劳,简洁直观,可为有人/无人协同指控软件界面设计实现提供借鉴。
参考文献
[1]The Department of Defense of USA. Unmanned Systems Integrated Roadmap FY2011-2036[R]. Washington DC:DoD,2012.
[2]Veth M, Busque J, Heesch D, et al. Affordable Moving Surface Target Engagement[C]. Proceedings of 2002 IEEE Aerospace Conference. Montana, USA: IEEE, 2002: 2545-2551.
[3]Butler A. U. S. Army Testing More MUM-T Technology[J]. Aviation Week & Space Technology, 2014,10.
[4]Balinda M, Mark E, Robert Y, et al. Hunter Standoff Killer Team(HSKT) Ground And Flight Test Results[J]. Proceedings of SPIE, 2007,6578:1-14.
[5]Kurnaz S, Cetin O. Autonomous Navigation and Landing Tasks for Fixed Wing Small Unmanned Aerial Vehicles[J]. Acta Polytechnica Hungarica,2010,7(1):1-10.
[6]Johnson D. Manned/Unmanned Common Architecture Program (Mcap) Net Centric Flight Tests[J]. Proceedings of SPIE, 2009,7345:1-10.
[7]王子熙.美軍有人直升机与无人机的协同作战[J].飞航导弹,2014,7:pp61-66.
[8]Department of Defense.Unmanned system integrated roadmap FY2013- 2038[R].Washington DC: Department of Defense,2014.
[9]Charles S. Rapid proto-duction of the Apache video from UAS for interoperability teaming-level2 (VUIT-2)[EB/OL].[2017-09-25]. https://www.dsiac.org/sites/default/ files/journals/2008-Fall.pdf.
[10]Breece R, Meely M. Testing the MUM teaming system from the Apache Block III attack helicopter:an armed manned-unmanned team[R]. Alabama: The Aviation Flight Test Directorate, 2010.
[11]韩志钢.美军有人直升机与无人机协同技术发展及启示[J].电讯技术,2018,1:pp113-118.
[12]AWACS/UAV协同目标识别技术研究[J].舰船电子对抗,2016,39(05)pp9-13.
[13]李乐山.人机界面设计[M].北京:科学出版社,2004,50.
[14]庄达民,完颜笑如.飞行员注意力分配理论与应用[M].北京:科学出版社,2013.[15]孙滨生.现代战斗机座舱布局[M].北京: 航空工业出版社,1989.
