
融合IMU的视觉SLAM系统研究
2019-06-20 10:31赵永达
电子技术与软件工程 2019年5期
关键词:陀螺仪
赵永达
摘要 基于特征点法的视觉SLAM系统在运行的过程中,运动过大,环境特征过少都会影响SLAM系统的运行效果。针对这个问题,提出了一种融合IMU的视觉SLAM系统。首先,提取关键点,并结合PNP与G2O方法估计相机的最优位姿,并构建地图。然后,统计当前帧关键点数量,若特征点足够少,特征点法无法估计相机的位姿变化,则结合陀螺仪与轮式里程计估计位姿;最后,如果特征点数量增加,提取关键特征,结合PNP与G2O的方法估计相机位姿的变化。通过实验可以看出融合IMU的视觉SLAM系统,可以准确的估计相机相机的位姿变化。
【关键词】特征点法 IMU 陀螺仪 轮式里程计
近年来,同时定位与地图构建(Simultaneous Localization And Mapping,SLAM)发展迅速涌现了大量优秀成果,如基于直接法SVO,以及基于特征点法的ORB-SLAM.CNN也被引入到了SLAM系统中,但以上的方法过于依赖图像数据,如果获取的图像中关键点不容易提取,将严重影响算法的准确性。
因此,本文提出一种融合IMU的SLAM算法。本方法首先按照特征点法估计位姿,当特征点变少时,结合轮式里程计以及陀螺仪估计位姿的变化,并构建地图。
1 算法简介
融合IMU的视觉SLAM算法首先获得一帧帧描述环境信息的图像,包括彩色图像和深度图像,并对彩色图像提取关键特征,通过PNP与G2O结合的方法估计相机的位姿变化。如果提取关键特点数量少时,采用IMU方法计算位姿。通过点云拼接构建地图。
2 关键特征法估计位姿
使用ORB算法提取图像特征,提取关键特征的同时,统计关键点的个数,如果某一帧图像提取关键点的个数小于50,则使用IMU计算位姿。在提取关键特征的同时,对关键特征进行简单的优化,ORB特征的提取分为提取Fast关键点和计算Brief描述子两个部分,在获取相邻两帧图像的匹配点的同时,统计所有匹配点中最小的海明距离d。對匹配点进行简单的优化,如果一对匹配点的海明距离大max(3d,40),认为该匹配点对不合格,从匹配结果中删除该匹配点对。按照该方法验证所有的匹配点对。
对于空间中的任意一个点P,用其次坐标表示为(x,y,z,1),P点投影到不同的图像中表示为
公式
,相机的位置和姿态表示为R、t,K为相机内参,得到关系:,可以看出[R|t]矩阵有12个未知量,因此取至少六个点,通过SVD分解可求得[R|t]。由于存在观测噪声,计算相机位姿会产生重投影误差。通过将误差求和构建最小二乘问题,误差项表示如(1)所示,通过G2O方法,估计最优位姿ξ。
公式
3 IMU方法估计位姿
采用IMU方法可以将位姿表示为特殊欧式群:
其中T是线性坐标,T的左上角为旋转矩
阵R,右侧为平移向量t,SO(3)是特殊正交群,
可以表示为
公式
表示空间中的坐标点。
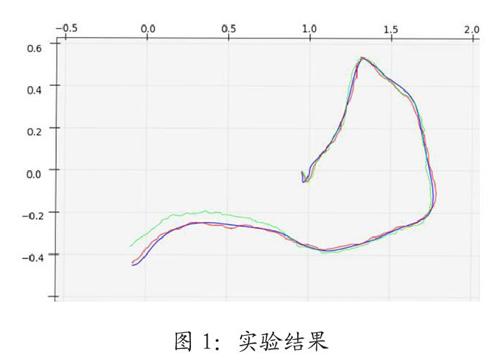
4 实验结果分析
运行融合IMU的视觉slam系统,估计相机的位姿,并对相机的真实位置进行记录。实验运行在系ubuntu14.04系统上,4核的cpu型号为Intel(R)Core(TM)i5-5200U,内存大小为8GB,显卡的型号是Intel(R) HD Graphics 5500。运行结果如图1所示。其中蓝色曲线为相机的真是运动轨迹,红色曲线为
融合IMU的视觉SLAM系统的估计结果。绿色曲线为ORB特征点法估计的轨迹。
5 结束语
通过实验可以看出由于相机运动到特征点较少的地方,特征点法的位姿估计,产生了较大的误差。本文提出的融合IMU的视觉SLAM系统,可以较准确的估计位姿,具有更好的稳定性。
参考文献
[1]Mur-Artal R, Montiel J M M, Tardos J D. ORB-SLAM: a Versatile and Accurate Monocular SLAM System[J]. IEEE Transactions on Robotics, 2015, 31(5):1147-1163.
[2]Forster C, Pizzoli M, Davide Scaramuzza*. SVO: Fast Semi-Direct Monocular Visual Odometry[C]// IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014. IEEE, 2014.
[3]张攀.惯性传感器辅助的立体视觉SLAM实现[D].厦门大学,2013.
[4]王泽华,梁冬泰,梁丹等.基于惯性/磁力传感器与单目视觉融合的SLAM方法[J].机器人,2018,40(06):933-941.
[5]顾照鹏,董秋雷.基于部分惯性传感器信息的单目视觉同步定位与地图创建方法[J].计算机辅助设计与图形学学报,2012,24(02):155-160.
[6]周绍磊,吴修振,刘刚等.一种单目视觉ORB-SLAM/INS组合导航方法[J].中国惯性技术学报,2016,24(05):633-637.
猜你喜欢
导航定位学报(2022年4期)2022-08-15
北京航空航天大学学报(2021年9期)2021-11-02
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年1期)2019-05-21
中国惯性技术学报(2018年4期)2018-11-08
百科探秘·航空航天(2017年9期)2017-12-31
电子制作(2017年13期)2017-12-15
百科探秘·航空航天(2017年9期)2017-11-07
中国惯性技术学报(2017年1期)2017-06-09
山东工业技术(2016年15期)2016-12-01
