新型带载楼梯运输车的设计与研究
2019-06-20 01:22王晶陆逸涵曹越张金龙
科技视界 2019年11期
关键词:仿真
王晶 陆逸涵 曹越 张金龙


【摘 要】为了解决市面上现有的辅助爬楼机存在稳定性差、自重大、安全性低和操作不便等诸多问题,设计了一种基于摇杆机构电助力爬楼机,该机构可以根据不同工况调整工作模式,并分析了爬楼机在爬楼和平地两种工况的作业过程。最后,对结构进行Croe仿真和实验,仿真和实验结果表明,该爬楼机可以适应爬楼和平地两种工作状态,且有良好的性能。
【关键词】带载运输车;带载爬楼;爬楼机;仿真
中图分类号: TP391.9;TG386 文献标识码: A 文章编号: 2095-2457(2019)11-0024-002
DOI:10.19694/j.cnki.issn2095-2457.2019.11.010
【Abstract】The existing auxiliary stair climber on the market has many problems,such as poor stability,self-importance,low safety and inconvenient operation.In order to solve them,an electric power-assisted climbing machine based on rocker mechanism is designed.The mechanism can adjust the working mode according to different working conditions.The operation processes of the climber in the conditions of climbing the stairs and the ground are analyzed. Finally,the Croe simulation and experiment are carried out on the structure.The results show that the climbing machine can adapt to the two working conditions and has good performance.
【Key words】Loaded transport vehicle;Loaded climbing building;Climbing machine;Simulation
0 引言
国外对爬楼装置的研究开始得相对较早,最早的专利是1892年美国的Bray发明的爬楼梯轮椅。此后,各国纷纷开始投入此项研究,其中美国、英国、德国和日本占主导地位,技术相对比较成熟,且有一些产品已经投入市场使用。我国对此类装置的研究虽然起步较晚,但近年来也涌现了很多这方面的专利[1],然而投入实际使用的还很少,加之当今社会网络日益发达,网购已经成为主流购物途径,各种生活用品在网上都可以买到,配送行业随之发展迅速,當快递人员或搬运工送到没有电梯的高层住宅时,爬楼往往会消耗很长的时间。运送较重物品时,难免会力不从心。借助一种工具或是装置助其搬运,不仅可以节省运货人员的体力,还可以提高运货效率。[2]
目前,按爬楼梯功能实现的原理主要分为步行式、履带式、轮组式、步进支撑式爬楼梯装置[3]。步行式爬楼装置存在对控制的要求很高,操作比较复杂,在平地行走时运动幅度不大,动作缓慢等问题[4];履带式爬楼装置存在重量大、运动不够灵活、爬楼时在楼梯边缘造成巨大的压力,对楼梯有一定的损坏;且平地使用所受阻力较大,而且转弯不方便等问题[5];轮组式爬楼装置存在上下楼梯时平稳性不高,重心起伏较大,装置体积较大,等问题;步进支撑式爬楼装置存在要有人辅助完成爬楼动作。为此设计了一款以摇杆为主要机构的爬楼机,建立了爬楼机的三维模型,通过Croe进行仿真实验证明可以满足要求。
1 结构设计
1.1 总体方案
本设计组成部分主要由主车体机架、运动机构、调心装置和平地辅助装置构成,在平地运动时由电机供动力,依靠橡胶轮胎和平地辅助装置运动。做爬楼运动时采用电机提供动力,爬楼摇臂实现爬楼动作,实现载物上、下楼的功能。
1.2 主体机架
爬楼机的主体机架采用铝合金,从而达到在相同性能装置轻量化的目的,使在使用中更加省力、便捷[6]。其结构如图1所示。
其中主要由手柄、载物架、橡胶轮胎、爬楼摇臂、平地辅助装置等组成。
1.3 运动机构
运动机构如图2所示,由电机、大轮、电机承载、滑移齿轮、爬楼摇臂构成,其关键为爬楼摇臂。
在进行爬楼运动时,将滑移齿轮打到左端,通过齿轮传动,带动摇臂转动,实现爬楼动作。在进行平地运动时,将滑移齿轮打到右端,齿轮不啮合,摇臂不工作,大轮工作,实现平地运动。
电机承载机构用于盛放电动机,与车架采用焊接方式连接。
1.4 调心装置
为了解决负载较大时,爬楼机整体重心不稳,操作不便的问题,设计了载物架可以上下进行调节的功能。通过载物架的调节,可以使整个爬楼机的重心得以调节。其结构如图3所示。
需要进行调整重心时,把载物架向上提起,将圆棒放置在更高一级或更低一级的钩子上,即可完成调整重心的动作。
1.5 平地辅助装置
爬楼机往往也需要在平地上拖行货物,普通爬楼机在平地上运动时不便操作,需要人工扶住爬楼机。为了解决这个问题,设计了一种可以在需要平地运动时放下,爬楼时收起的平地辅助装置。其结构如图4所示。
在进行爬楼运动时,圆棒卡扣于卡件内,平地辅助装置处于收起状态,不影响爬楼机的爬楼运动;在进行平地拖行时,下压卡件,让圆棒脱离,平地辅助装置展开。
2 爬楼机运动状态分析
爬楼机在使用的过程中分为平地运动和爬楼运动,以下对爬楼机平地运动和爬楼运动的过程做分析。
2.1 爬楼运动
爬楼过程是本次设计爬楼机的重点,现假设爬楼机相关参数、尺寸和楼梯的参数都合适,则爬楼机进行爬楼运动过程如表1所示。
2.2 平地运动
进行平地运动时,首先将滑移齿轮打到右端,进入平地运动模式。再将固定装置下压,使定位棒脱离,杆1与杆2展开,滑块下移至定位板位置,杆1与杆2达到死点位置,起到稳定装置的作用,此时平地装置可以支撑爬楼机在平地进行运动。若再要进行爬楼运动时将滑移齿轮打到左端,使摇臂工作,并将定位棒上提,卡入固定装置即可。
3 仿真及实验
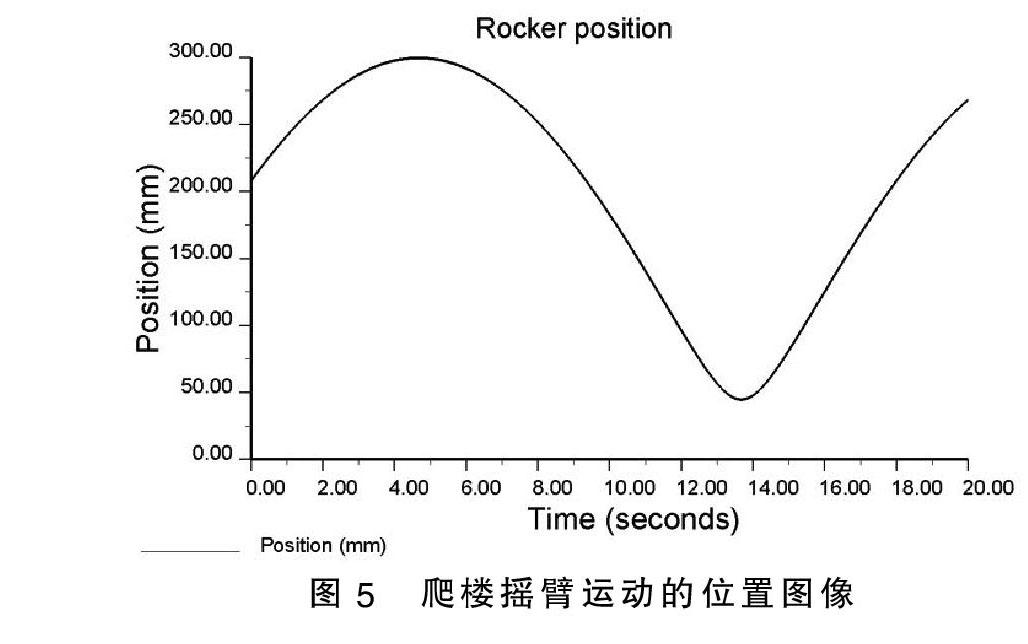
对爬楼机进行Croe仿真,主要观察爬楼摇臂是否可以正常运转,整机工作是否良好。通过仿真得出摇臂对于地面的位置如图像5。根据图像可以计算出摇臂的最高位置距地面260mm,满足一般楼梯的高度。
4 结语
本文设计了一种新型带载楼梯运输车,其综合了市面上许多爬楼机的优点,一定程度上解决了楼梯搬运以及在平地爬楼机如何工作的问题。对爬楼机的整体结构进行了设计,重点分析了爬楼机在工作时的过程;并通过Croe仿真验证了该爬楼机的可行性。
【参考文献】
[1]尚小溪.轮组式爬楼轮椅运动装置参数设计[J].黑龙江科技信息,2016(17):140-141.
[2]尹鑫磊.多功能电动爬楼机设计[D].天津:天津科技大学,2017.
[3]马岩,李剑.一种便携式爬楼装置[P].北京:CN104434431A,2015-03-25.
[4]程伟,乔铁良,等.一种爬楼机器人[P].陕西:CN206218050U,2017-06-06.
[5]童俊华.行星轮式爬楼梯机器人小车的研究[D].江西:江西理工大学,2009.
[6]顾艳红,王晟楠,刘占民.轻载型电动载物爬楼机[J].机械传动,2018,42(09):166-169+173.
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12
科技资讯(2016年18期)2016-11-15
科技资讯(2016年18期)2016-11-15