微型多旋翼无人机半物理虚拟飞行和控制实验平台
2019-06-18 03:09:52马忠丽刘宏达张兰勇彭秀艳
实验技术与管理 2019年5期
马忠丽, 刘宏达, 张兰勇, 彭秀艳
(1. 成都信息工程大学 控制工程学院, 四川 成都 610225; 2. 哈尔滨工程大学 自动化学院, 黑龙江 哈尔滨 150001)
微型多旋翼飞行器售价低、操作简单,成为越来越多无人机爱好者航拍、航模入门的练手工具[1]。与军事和民用中被广泛使用的多旋翼无人机相比,微型多旋翼无人机的动力学参数和PID控制复杂程度有明显区别,但基本构成和控制原理是类似的,并且操作更安全。因此,将微型多旋翼无人机作为入门机,学习和掌握多旋翼无人机的飞行和控制特点,可以为操控大型多旋翼无人机提供良好帮助。
目前,国内越来越多的高校和仪器设备厂商在开发多旋翼无人机实验系统[2-3]。这些系统一般是四旋翼无人机平台,用于四旋翼无人机的飞行姿态测量,没有提供灵活的调试平台、逼真的操作体验和立见的控制效果,并且鲜有涉及六旋翼、八旋翼无人机。因此,笔者设计和开发了以微型多旋翼无人机物理平台为辅助、以地面站监控软件和模拟飞行训练软件为主,方便在桌面操作和调试的微型多旋翼无人机实验平台。在此平台的基础上,运用C#开发飞行器地面站监控软件,利用Unity3D[4]开发飞行器动画模拟组装和飞行软件以及飞行器飞行模拟训练软件,用Unity3D构建用户交互主界面,实现了多种软件功能的相互调用。该微型多旋翼无人机半物理虚拟飞行和控制平台能够帮助用户学习微型多旋翼无人机的构成、组装和飞行原理,学习无人机飞行姿态的解算和控制方法,可以进行飞行器模拟操作训练。
1 半物理虚拟实验平台总体设计
微型多旋翼无人机半物理虚拟飞行和控制实验平台由软件平台和硬件平台两部分组成。软件平台包括地面站监控软件、动画虚拟组装软件和模拟飞行训练软件3部分;硬件平台包括计算机、微型多旋翼物理系统和手柄3部分。系统将虚拟仿真和实物仿真有机地组合在一起,实验平台总体设计构架如图1所示。

图1 半物理虚拟实验平台总体构架图
(1) 地面站监控软件。功能是通过串行通信接收和处理微型多旋翼无人机实物平台传输的数据,监测多旋翼无人机的飞行姿态参数,并对多旋翼无人机的飞行姿态进行PID控制。
(2) 动画虚拟组装软件。功能是帮助学生学习多旋翼无人机的构成和飞行原理,通过构建元件库,采用Unity3D实现四旋翼、六旋翼和八旋翼等多种旋翼式飞行器的动态组装和飞行姿态的动画飞行。
(3) 模拟飞行训练软件。由运动场景、物理系统和运动控制3部分构成。运动场景按难度划分等级,难度等级越高,设置的障碍物越多,帮助操作者练习飞行操作、提高操作水平;物理系统是虚拟出操作多旋翼无人机的真实感,将多旋翼模型与障碍物碰撞、多旋翼模型坠毁、多旋翼模型自身重力对飞行的影响等体现出来;运动控制是允许用户选择多旋翼遥控器控制方式,并通过编写运动脚本将运动变量和摇杆一一对应,给使用者带来实际操控的体验感。
(4) 多旋翼物理平台。由电源模块、传感器模块、控制器模块等组成。具体包括:多旋翼飞行器本体,万向节连接件和可升降平台,可以实现多旋翼无人机俯仰、横滚、偏航和垂直4个自由度的运动。
(5) 计算机和手柄。计算机安装系统的要求为64位Windows10操作系统,主要功能是安装平台各类软件,并实现与硬件的数据通信;手柄采用普通的游戏手柄,可以进行基本的方向和油门设置,主要功能是进行多旋翼飞行器模拟训练操作。
2 微型四旋翼无人机物理平台设计
2.1 电源模块
由于微型多旋翼无人机尺寸小,因此电源模块[5]所占空间应尽量小。整个系统负载功率不大,压差最小为200 mV,输出电流为500 mA,采用1节锂电池作为输入电压即可。选用MIC5219芯片降压至3.3 V。升压用的是尺寸较小的LTC3200开关电容电压倍增器,给单片机和接收机供电。
2.2 单片机最小系统模块
控制器模块[6]是四旋翼无人机的关键部分,主要功能是通过计算处理测量元件输出的数据,如传感器采集到角度与加速度等信息,并根据内部预设的控制算法,产生输出控制量[7],调节旋翼电机的转速和方向。控制器还要保持与地面站的数据连接。控制芯片应有足够的运算能力、高转换精度、足够的通信接口。
根据上述要求,选择ARM(型号:STM32F103C8T6)作为控制器,它具有高性能、低功耗、先进的RISC体系结构、6种睡眠模式等特点[8]。
2.3 传感器模块
四旋翼无人机要平稳飞行,就需要不断进行自身状态的检测与修正,因此选择合适的传感器至关重要。这里选用尺寸较小的MPU6050作为惯性传感器,其内部有三轴陀螺仪和加速度传感器,采样精度高。选用MS5611气压传感器,用来采集气压数据,实现四旋翼定高控制功能。两款芯片[9]均采用I2C通信,传输数字信号,抗干扰能力强,通信速率快。
2.4 微型四旋翼无人机物理平台总体结构
微型四旋翼无人机物理平台总体构成如图2所示,其基本参数如下:

图2 微型四旋翼无人机物理平台总体构成图
飞行时间:6 min左右;
飞行距离:>30 m(空旷),不建议在室外飞行;
轴距:92×92 mm;
遥控信号默认为PWM信号;
传感器:三轴陀螺仪、三轴加速度计、气压计;
主控:STM32F103C8T6;
通信接口:USART、USB、SWD。
3 用户可视化交互界面系统设计
3.1 地面站监控软件
(1) 软件主界面构架。地面站监控软件采用C#开发,主要功能有:飞行数据显示、数据波形变化显示、三维虚拟飞行姿态显示和在线PID控制。用户可视化界面是平台的枢纽,可以实现对全部软件功能的调用和交互。可视化界面在Unity3D下开发。
(2) 数据通信端口。地面站软件和物理平台的数据通信采用RS-232串行通信方式[10]。数据波特率9600、19200、38400、115200可选,8位数据,无奇偶校验,1位停止位,无硬件握手协议。
(3) PID控制在线测试。无人机采用串级PID控制器,调节两组参数,先调节角速度参数,使4个旋翼的角速度没有剧烈变化;再调节角度参数。串级PID控制[11]公式为
式中,KP、KI、KD是角速度的P、I、D参数,KP1是角度的P参数,e(t)是角度的误差项,U(t)是系统的输出量。
微型四旋翼控制系统框图如图3所示。

图3 四旋翼系统控制框图
点击软件主界面“在线调试”,用户可以进入PID参数调试界面,可通过数据线将设置参数写入无人机中,实现参数的修改与PID控制过程的调试。
3.2 动画虚拟组装软件
动画虚拟组装软件采用Unity3D编写,用Unity3D自带的Animation动画编辑器实现。此外,还运用Unity3D的动画融合、附加动画、动画混合等功能。系统实现了四旋翼、六旋翼、八旋翼的组装动画、飞行姿态动画等多个3D动画。系统为用户可视化界面添加2D动画。图4给出一组六旋翼无人机安装过程。
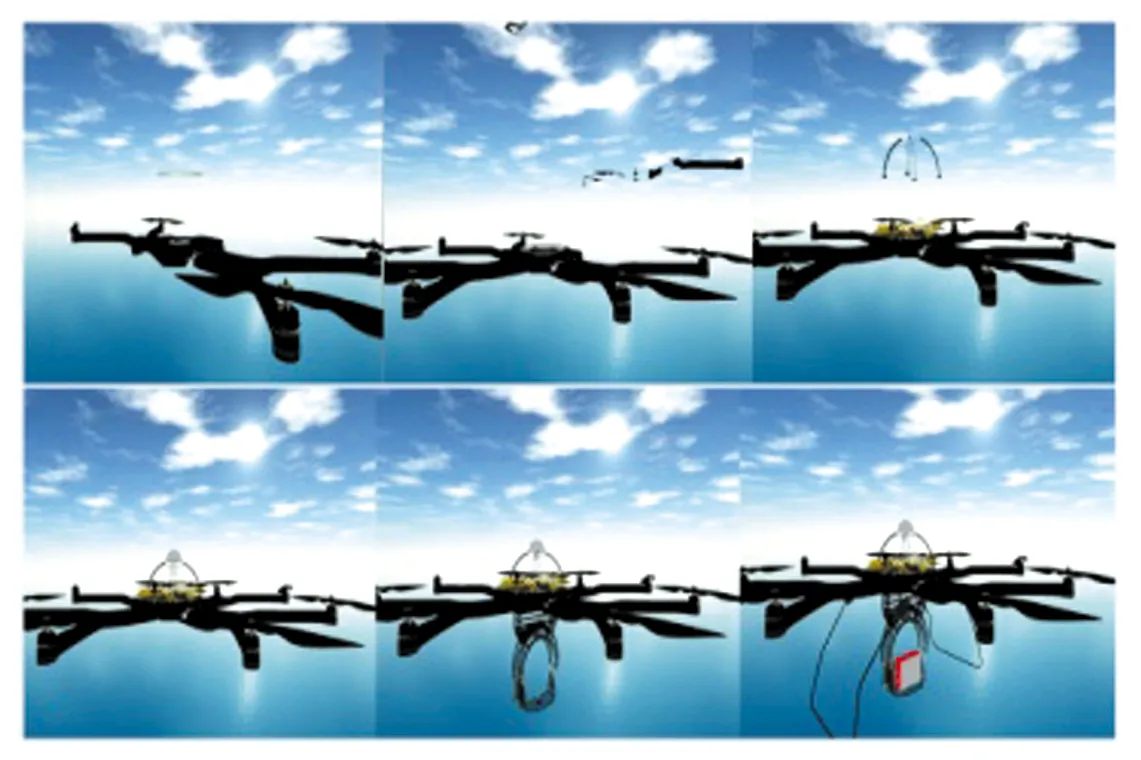
图4 六旋翼无人机安装过程
3.3 模拟飞行训练软件
3.3.1 运动场景模拟。
利用Unity3D的自带地形编辑系统,进行地形起伏、平滑、纹理等各种处理,完成运动场景搭建。
3.3.2 物理系统模拟
在现实环境中,四旋翼飞行器如果发生碰撞会导致损坏的后果;但在虚拟平台中,构建的场景是虚拟的,当发生碰撞时,四旋翼会穿透障碍物,与真实现象不符。因此需要添加物理系统,进行碰撞检测。
Unity3D中碰撞检测常用的算法是包围盒算法[12],即在对象的外围包一外盒,该外盒由一些基本几何体组合构成,且其总体积能够包裹住原先的对象,通过对外盒进行碰撞检测。当两个外盒没有相交时,则证明两个物体对象之间没有发生碰撞。四旋翼无人机模型和障碍物的包围盒算法碰撞检测如图5所示。
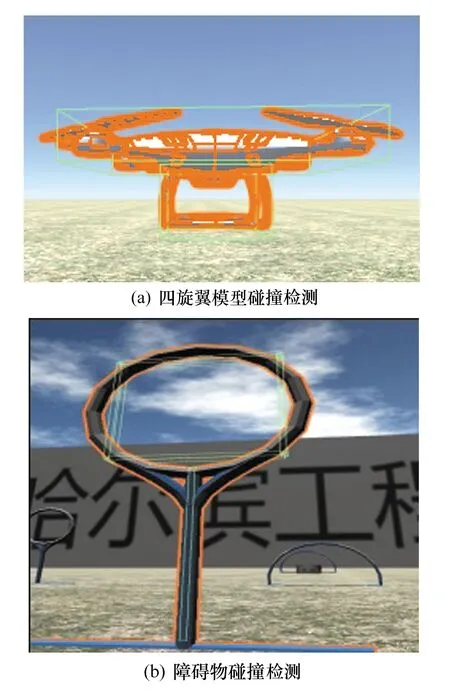
图5 包围盒算法碰撞检测
图6给出四旋翼飞行器模型在与障碍物相接触时,是否弹出预先设计好的碰撞界面测试,测试结果显实碰撞检测功能正常。

图6 检测碰撞返回界面
3.3.3 运动控制模拟
飞行器运动操控有键盘控制和手柄控制两种方式。Unity3D中可通过设置Edit>Projects Setting>Input.实现手柄与模拟训练系统的交互。
目前四旋翼飞行器的手柄操控有美国手和日本手两种。对于两种不同的操控方式,本系统通过运动控制脚本的设置,可实现用户在模拟系统中美国手和日本手的切换,而无需添加多个控制手柄。
图7给出用美国手手柄控制模拟训练系统中飞行器模型向右侧飞行的测试效果。

图7 手柄控制飞行器侧飞效果
4 结语
本文针对多旋翼飞行器课程、自动控制元件课程、自动控制理论课程及能够设置相关实验环节的其他课程的创新需要,设计了在可升降装置和万向节联结结构下,多旋翼飞行器的飞行和控制半物理虚拟实验平台。平台不仅能完成不同旋翼数量的多旋翼飞行系统的基本工作原理、组成结构以及简单的PID控制算法,而且能够实现不同场景下的多旋翼无人机的模拟训练,既可以作为大学生相关课程学习的实验设备,也可以作为中小学生练习操作四旋翼无人机飞行的训练系统,具有广泛实用价值。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
装备制造技术(2020年11期)2021-01-26 00:39:30
电子制作(2019年9期)2019-05-30 09:41:48
电子制作(2018年11期)2018-08-04 03:25:44
电子制作(2018年2期)2018-04-18 07:13:25
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
科普童话·百科探秘(2015年5期)2015-05-26 07:10:33