
结合帧差法与MeanShift的抗遮挡跟踪算法
2019-06-15 03:31岳昊恩袁亮吕凯
现代电子技术 2019年12期
岳昊恩 袁亮 吕凯
摘 要: 针对目标严重遮挡后,运动状态发生改变时,传统的基于运動预测的算法无法有效跟踪的问题,提出一种基于帧差法的改进算法。引入巴氏系数(Bhattacharyya)作为目标是否发生遮挡的判据;当发生遮挡时,帧差法检测目标,再次检测到目标时将此位置作为Mean Shift迭代的起始位置;最后正常跟踪时采用卡尔曼滤波预测目标位置,减少迭代次数。实验结果表明,当目标在严重遮挡后,运动状态改变时,基于运动预测的算法将无法跟踪目标,改进算法能够重新跟踪目标。
关键词: 目标检测; 跟踪算法; 卡尔曼滤波; Mean Shift; 帧差法; 严重遮挡
中图分类号: TN391?34 文献标识码: A 文章编号: 1004?373X(2019)12?0180?03
Abstract: Since the traditional motion prediction based algorithm cannot conduct effective tracking when the moving state of the target changes after severe occlusion, an improved algorithm based on the frame difference method is proposed. Bhattacharyya is introduced as the judgment criterion of whether the target is occluded or not. The frame difference method is used to detect the target when occlusion occurs. The position where the target is again detected is taken as the starting position of the Mean Shift iteration. The Kalman filtering is used to predict the target position during normal tracking, so as to reduce iteration times. The experimental results show that the improved algorithm can track the target again while the motion prediction based algorithm cannot track the target when the moving state of the target changes after severe occlusion.
Keywords: target detection; tracking algorithm; Kalman filtering; Mean Shift; frame difference method; severe occlusion
0 引 言
计算机视觉技术在交通监控[1]、人机交互[2]和无人机飞控[3]等领域得到广泛的应用。运动目标跟踪技术[4]是计算机视觉的一个重要分支,具有重要研究意义。均值偏移(Mean Shift)算法由于其计算量小、颜色特征不易受外形变化干扰,得到了广泛的应用,但当运动目标发生严重遮挡时,均值偏移算法将无法跟踪目标。针对遮挡问题很多学者对算法进行了改进:文献[5]提出使用卡尔曼滤波改进均值偏移算法,使算法能够应对短时遮挡;文献[6]提出分块改进算法,每次选择置信度最高的子块作为跟踪结果,但发生完全遮挡时,没有最优的子块;文献[7]提出在传统的卡尔曼和均值偏移算法框架下,加入线性预测的方法来应对严重遮挡问题,当发生严重遮挡时采用线性预测作为均值偏移算法迭代起始点,但当目标在严重遮挡后运动状态发生改变,基于运动预测的方法无法获得目标准确位置,将无法跟踪到目标。
针对这些问题提出使用光流法改进的均值偏移算法,考虑目标在完全遮挡后运动状态可能发生改变,此时使用帧差法检测运动目标,当检测到运动目标时,将该位置作为均值偏移算法迭代起始点。
1 基于运动预测的抗遮挡算法
1.1 卡尔曼滤波算法
卡尔曼滤波算法[8]用于估计目标的位置,可以减少Mean Shift算法迭代次数。假设系统噪声和观测噪声均为白噪声,对运动目标构建系统模型如下:
1.2 均值偏移算法
均值偏移算法[9]是一种无参密度梯度估计算法,给定初始点[x]和核函数[K(xi-x)],那么用核函数定义的窗口内的密度函数的加权均值为:
式中:[N(x)]为x领域内的一系列点;[K(xi)≠0]。[m(x)-x]为均值偏移量向量,而Mean Shift算法为要用新的位置替代原来的位置([x←m(x)]),一直迭代到[m(x)]收敛为止,此时会得到局部最大值。
1.3 加入线性预测的融合算法
如文献[7]中算法所述,引入Bhattacharyya作为遮挡判断系数,当系数小于一定阈值时认为发生遮挡,此时开始使用线性预测的位置作为下一帧的均值偏移算法起始位置,正常跟踪时,采用卡尔曼滤波算法结果作为下一帧均值偏移算法真实位置。但当目标运动速度发生变化时,线性预测将无法真实反映目标位置。
2 基于帧差法的抗遮挡算法
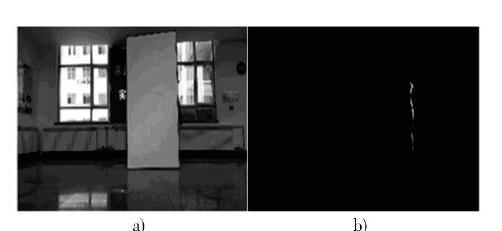
帧差法[10]是一种较为常用的背景固定情况下的运动目标检测算法,发生遮挡后,调用帧差法,获得两帧相减结果,之后采用形态学方法处理,去除噪点,获取最大腐蚀区域,将该区域作为目标检测结果。检测及形态学处理结果如图1所示。
图1 帧差法成功检测到出现目标
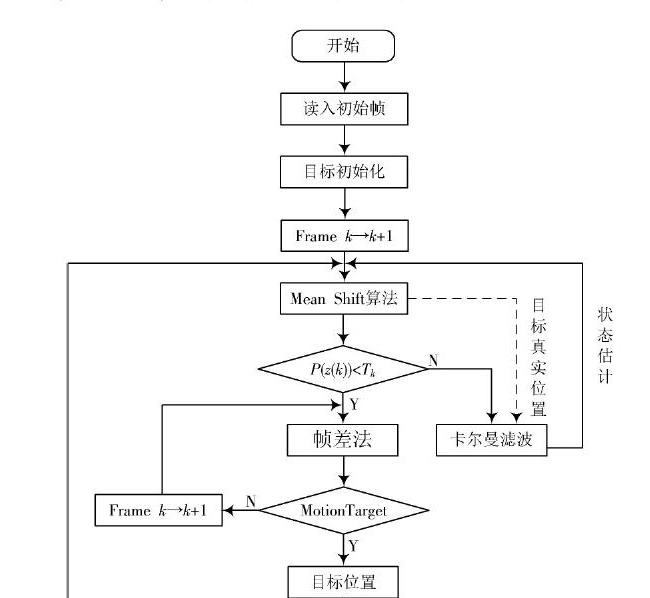
改进算法流程图如图2所示。根据相似度阈值判断目标是否发生遮挡,当发生遮挡时,执行帧差法进行运动目标的监测,如果没有检测到目标,则导入下一帧图像继续进行检测,直到目标重新出现;低于阈值时正常跟踪,采用卡尔曼滤波算法对下一帧的目标位置进行预测,减少均值偏移算法迭代次数。
图2 基于帧差法的抗遮挡跟踪算法
3 实验结果与分析
本文使用室内行人行走视频进行跟踪实验(CPU:i5,4核2.60 GHz,4 GB,运行环境WIN7,Matlab 2017a),分别拍摄一段正常行走的视频序列和一段遮挡后减速的视频序列进行实验。
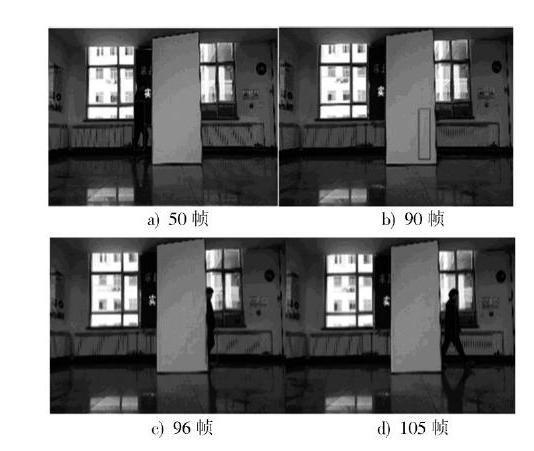
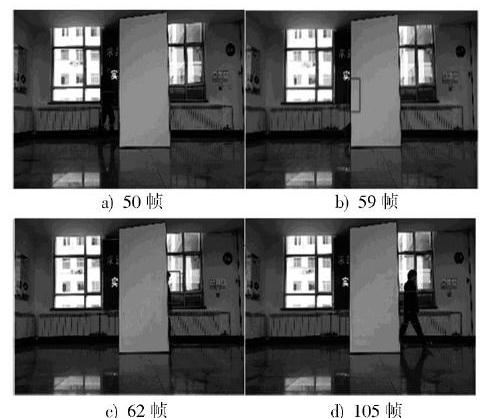
在遮挡时匀速行走,文献[7]算法和本文算法对照效果如图3、图4所示。易知,两种算法均能够正常跟踪,其中本文算法在第62帧目标重新出现后,能重新定位目标并跟踪。
图3 遮挡下匀速行走时文献[7]算法跟踪结果
图4 遮挡下匀速行走时本文算法跟踪结果
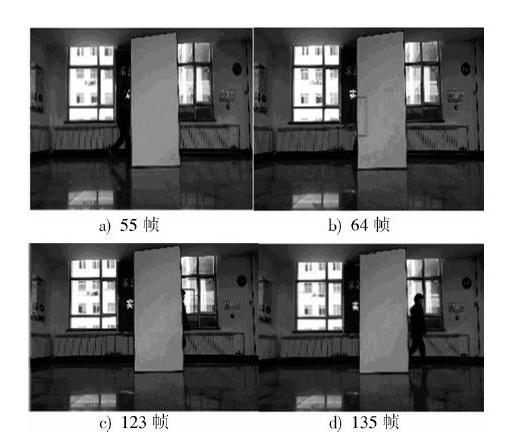
在发生遮挡时减速行走,文献[7]算法和本文算法对照效果如图5、图6所示。文献[7]算法由于始终采用线性預测结果作为均值偏移算法迭代起始点,当目标再次出现后,由于无法跟踪到目标,巴氏系数始终很低,将会一直采用线性预测结果作为最终跟踪结果,导致跟踪失败。而本文改进算法能够在目标再次出现后迅速定位到目标实现跟踪。
4 结 论
针对在严重遮挡过程中目标运动状态发生改变时,基于运动预测的方法将无法有效地跟踪目标,提出结合帧差法的改进Mean Shift算法。引入巴氏系数作为遮挡判断,当遮挡发生后,采用帧差法进行运动目标检测,当目标在遮挡发生时改变运动状态,目标复出后本文算法能够重新定位目标,克服了运动状态改变后基于运动预测的算法在目标复出后无法跟踪目标的问题。
图5 遮挡减速行走时文献[7]算法跟踪结果
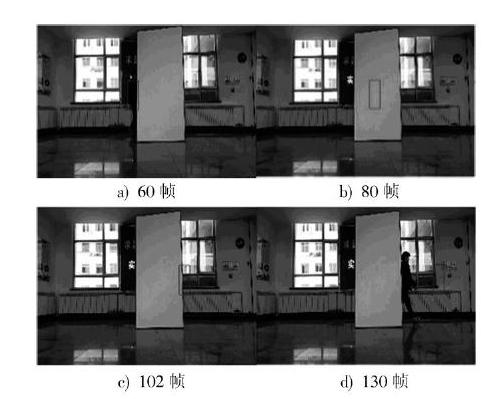
图6 遮挡减速行走时本文算法跟踪结果
参考文献
[1] 谭呈祥.基于计算机视觉的实时车辆运动速度检测算法研究[J].现代电子技术,2016,39(9):164?166.
TAN Chengxiang. Study on real?time vehicle motion?speed detection algorithm based on computer vision [J]. Modern electronics technique, 2016, 39(9): 164?166.
[2] 沈洁.基于手势识别技术的交互式虚拟摄影系统设计与实现[J].现代电子技术,2018,41(5):93?96.
SHEN Jie. Design and implementation of interactive virtual photography system based on gesture recognition technology [J]. Modern electronics technique, 2018, 41(5): 93?96.
[3] 姚西,亢岩.图像透视特征提取方法及其在无人机视觉导航中的应用[J].现代电子技术,2014,37(2):16?20.
YAO Xi, KANG Yan. Methods of image perspective feature extraction and its application in UAV visual navigation [J]. Modern electronics technique, 2014, 37(2): 16?20.
猜你喜欢
测控技术(2018年12期)2018-11-25
北京航空航天大学学报(2017年9期)2017-12-18
软件(2016年4期)2017-01-20
科教导刊·电子版(2016年28期)2017-01-10
科学与财富(2016年28期)2016-10-14
电脑知识与技术(2016年5期)2016-04-14
电源技术(2016年9期)2016-02-27
科技视界(2016年4期)2016-02-22
电源技术(2015年1期)2015-08-22
电测与仪表(2015年24期)2015-04-09
