
端电压及功角双重稳定约束鲁棒自适应励磁控制
2019-06-11 11:35迟福建刘聪申刚尚德华田艳华李桂鑫王哲
中国测试 2019年4期
迟福建 刘聪 申刚 尚德华 田艳华 李桂鑫 王哲
摘要:为实现励磁系统非线性控制的端电压和功角双重稳定约束,基于非线性坐标变换方法,构建励磁系统非线性等价系统模型,采用鲁棒自适应设计方法实现Lyapunov函数构建、参数自适应估计和等价系统耗散稳定控制。在输出功率增加和三相接地故障状态下,对新的励磁控制方法进行仿真测试和分析。仿真结果表明:相对于传统反演鲁棒励磁控制方法,状态变量波动次数减少50%,端电压和功角稳定时间由0.2s缩短为0.1s,端电压始终保持为额定电压,没有出现电压偏移问题,不确定参数能够在0.05s内完成估测。研究成果对于提高励磁系统暂态稳定能力和端电压恒定控制精度具有一定意义。
关键词:非线性控制;端电压及功角稳定;鲁棒自适应控制;参数自适应;励磁系统
中图分类号:TM721文献标志码:A 文章编号:1674-5124(2019)04-0129-06
0引言
在独立电力系统或陆地无穷大电网中,励磁控制系统均担负着电压调节和改善电力系统动、静态稳定控制的重要功能,所以励磁控制技术是众多学者关注的研究内容。
励磁系统模型具有非线性、内部参数不确定和外部干扰不确定的特征。为了提高励磁控制的性能,文献[2]采用反演自适应设计的方法对励磁控制进行了分析,但是该方法更多关注的是功角稳定性,对于发电机端电压恒定性问题考虑不足;文献14l采用自抗扰控制策略对励磁系统非线性控制进行了分析,但是并没有考虑系统模型的不确定特征;文献[5]采用高阶滑模控制对励磁系统的稳定控制进行了分析,同样在励磁控制过程中没有考虑阻尼系数等模型不确定参数和端电压恒定控制问题;文献[6]采用Lyapunov函数设计与H∞控制相结合方法详细分析了含有参数不确定和外部干扰的励磁系统稳定控制问题,实现了励磁系统功角的鲁棒稳定控制,但是并没有考虑发电机端电压恒定控制问题;文献[7]采用精确反馈线性化方法解决了非线性励磁系统最优控制问题;文献[8-9]基于耗散系统理论的Hamilton系统稳定控制理论,从稳定系统能量函数角度对励磁系统稳定控制进行了分析,但是同样没有考虑励磁系统的参数不确定性问题;文献[10]采用目标全息方法,通过构建励磁系统布鲁诺夫斯基标准型模型,给出了励磁系统非线性最优控制实现方法;文献[11]采用终端滑模控制方法对励磁系统控制进行了分析,实现了滑模励磁控制的弱抖振控制;文献[12]采用扩展状态观测的方法,对不确定非线性部分进行了估测,最终实现了励磁系统的稳定控制;文献[13]通过综合考虑电力系统的综合惯量中心,在实现电力系统功角稳定控制的同时,兼顾了端电压恒定控制,但是给出的控制律非常复杂,且含有微分项,增加了工程实现的难度。
本文在详细分析励磁系统非线性不确定模型的基础上,将Ly印unoV函数构建和耗散系统理论相结合,给出了一种综合实现励磁系统端电压恒定和功角稳定控制的鲁棒自适应控制方法。由于所给控制方法同时考虑了励磁系统的非线性、不确定和外部干扰特点,且在控制律推导过程中最大限度地保留了励磁系统的非线性特征,因此,对于提高励磁系统的稳定控制性能具有一定的意义。为了验证本文方法的性能,在三相接地故障和负载突变两种运行状态下,对励磁控制系统进行了仿真分析。
1励磁系统模型非线性及不确定性分析
在大范围运行状况下,由于电抗饱和特性、阻尼系数的不精确性和外部干擾影响,励磁系统非线性模型可表示为
由上述推导可知,励磁控制规律式(26)完整地保留了系统的非线性特性,且可以达到AU为零的目标,因此,具有非线性鲁棒稳定控制和消除端电压偏差的双重优势。
3仿真测试与分析
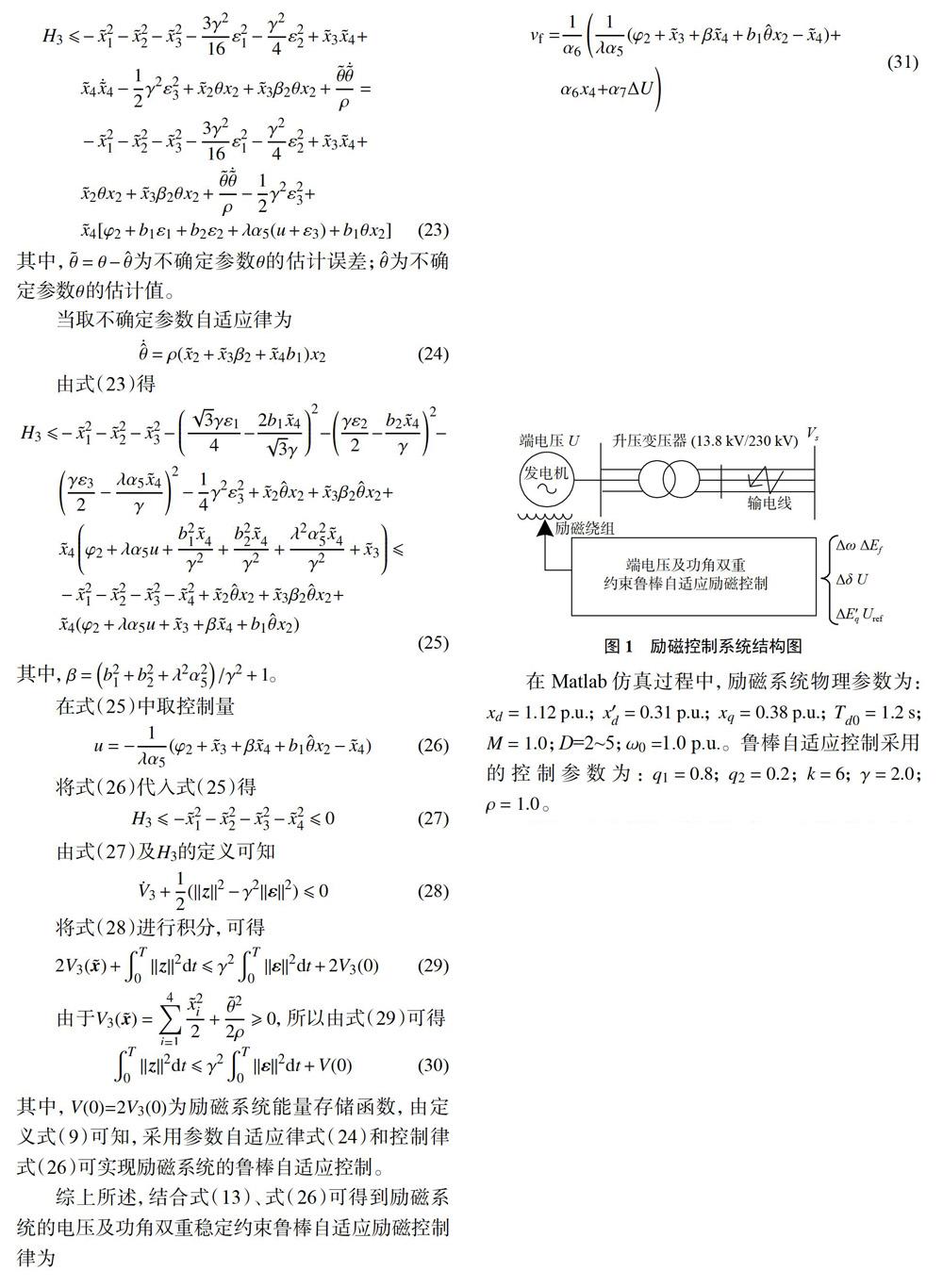
为了验证所提鲁棒自适应励磁控制性能,并与传统反演鲁棒励磁控制进行对比,分别对负载突变和三相接地故障进行了仿真。励磁系统结构如图l所示。
传统反演鲁棒励磁控制与本文所提控制方法主要区别是前者不具备参数自适应功能,且没有考虑式(4)表示的端电压稳定控制功能,所以除参数p外,其他控制参数选择与本文给出的鲁棒自适应控制方法相同。
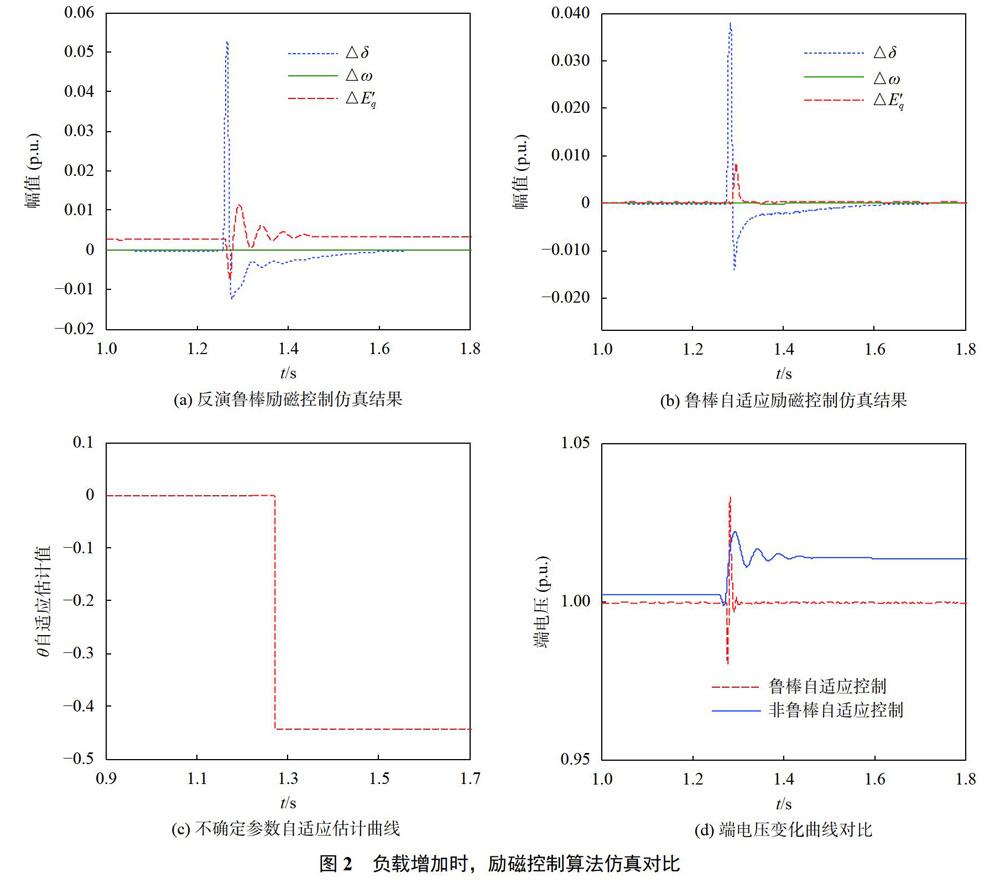
3.1负载增加仿真测试及分析
励磁系统模型中发电机的额定容量为500MV'A,初始输出功率为180MW,在1.28s时突然增加输出功率为200MW,Q=80MWar。分别采用传统反演鲁棒励磁控制与本文所提鲁棒自适应控制方法进行仿真,仿真结果如图2所示。
比较图2(a)和图2(b)可知,采用本文所提鲁棒自适应励磁控制方法后,由于考虑了励磁系统参数不确定性特征和发电机端电压恒定控制约束,△E'q的波动次数由3次降低为1次,且稳定时间由0.2s降低0.1s左右。由图2(c)和图2(d)可知,不确定参数θ能够很快地实现稳定估测,在负载变化前后,采用鲁棒自适应控制时,端电压始终保持为额定电压,而采用非鲁棒自适应控制时,端电压出现了较大的偏差。
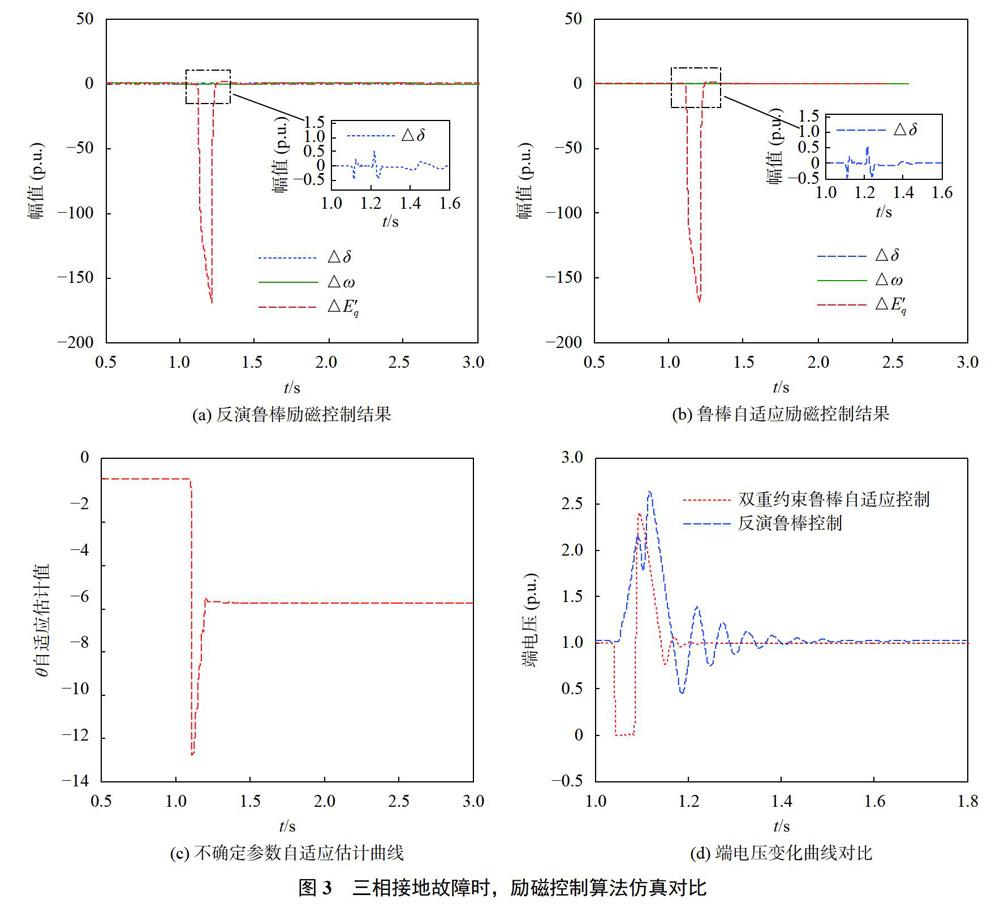
3.2三相接地故障仿真测试及分析
发电机额定容量同前,初始负载值为140Mw,在1.05s时在升压变压器的二次侧发生持续0.1s的三相接地故障。分别采用传统反演鲁棒励磁控制与本文所提鲁棒自适应控制方法进行仿真,仿真对比结果如图3所示。
比较图3(a)和图3(b)可知,发生三相接地故障后,相对于传统反演鲁棒励磁控制,采用本文所提鲁棒自适应励磁控制方法后,功角和暂态电势的稳定时间缩短。由图3(c)和图3(d)可知,不确定参数能够同样可以实现快速稳定估测,且端电压超量由原来的2.7倍缩小为2.4倍,端电压的波动次数由5次减少为2次。
4结束语
本文基于非线性系统耗散系统稳定控制理论,采用Lyapunov函数设计和参数自适应估测相结合方法,给出了一种端电压和功角双重稳定约束的鲁棒自适应励磁控制新方法,解决励磁系统端电压恒定和功角双重稳定控制的励磁系统自适应控制问题。为验证所提控制方法的有效性,在输出功率增加和三相接地故障情形下进行了仿真测试,并与传统反演鲁棒控制方法进行了对比分析,仿真结果表明,端电压能够始终保持为额定值,解决了传统反演鲁棒励磁控制中端电压随负载增加而偏差增大的不足,状态变量的稳定速度得到明显提高,不确定参数能够快速实现跟踪估测,在三相接地故障状态下,端电压的超调和震荡明显减弱。研究成果对于提高励磁系统的暂态稳定能力和端电压恒定精度具有一定意义。
