
货物抓取机器人设计
2019-06-10 09:31陈德麟韩沛宇
科技创新导报 2019年5期
陈德麟 韩沛宇
摘 要:随着我国物流行业的快速发展,货物的流动性以及流量的大量增加都为仓储行业带来了巨大的挑战。而货物抓取机器人可以有效地利用工作环境的空间,改善货物的搬运能力,有效地节约货物装卸搬运需要的作业时间。在文中从系统实现功能以及系统方案这两个方面对货物抓取机器人设计进行介绍,并分析了该货物抓取机器人的特色,为货物抓取机器人的设计提供借鉴。
关键词:货物抓取 STM32单片机 机械臂 PWM控制 数据传输模块
中图分类号:G64 文献标识码:A 文章编号:1674-098X(2019)02(b)-0081-02
1 立题意义
我国物流行业规模不断扩大,货物的流动性和流量的增加对现代仓储行业提出了更高的要求。为实现高效率的货品出入库管理,越来越多的机器人设备开始应用于仓储管理中[1]。
根据上述分析的机器人发展前景及物流行业未来发展方向,本文提出的设计一种具有手持终端控制和自动控制两种控制方式的货物抓取机器人具有很强的研究价值和实际意义。
2 研究内容
本项目设计一款货物抓取机器人。该货物抓取机器人设置成手持终端控制和自动控制两种模式。该机器人以金属底盘搭配四对负重轮作为运输工具,采用外置高增益天线,能够更好地接收到信号;能够实时视频WiFi控制,实现第一人称视角及控制;使用调速系统,可以更好掌控小车速度;安装的四自由度机械臂实现对目标货物的精准抓取。
系统最终实现的主要功能如下:
(1)实时视频WiFi控制功能,通过手机,电脑等通过WiFi连接机器人,在屏幕上实时观看画面以第一人称视角控制机器人,以此来实现手持终端控制;
(2)路径规划功能,通过在电脑或手机上描绘路径,机器人可以按照规划好的路径行进,以此来实现机器人的自动控制;
(3)机械臂抓取货物功能,采用四自由度机械臂,模拟人体手臂设计,舵机有防卡死功能,与控制软件界面同步控制,自由度多,具有很大的灵活性,控制起来更加方便;
(4)躲避障碍功能,机器人同规划路径运动时,通过传感器采集信息并反馈给主控制板,主控制板发出信息使机器人避开障碍;
(5)云台控制摄像头功能,通过手机触屏,可灵活地控制二自由度云台上下左右带动摄像头转动,可以更方便地观察目标。
3 货物抓取机器人系统实现方案
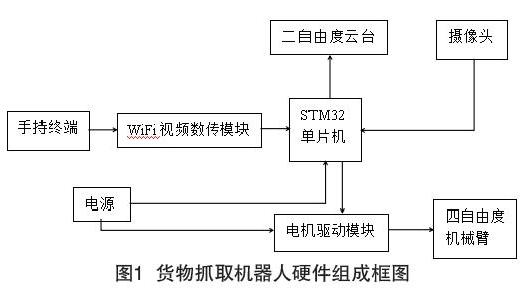
3.1 货物抓取机器人系统硬件总体方案设计
货物抓取机器人系统系统主要由STM32主控板、电源、电机驱动模块、Robot-Eyes摄像头、WiFi视频数据传输模块、二自由度视频云台和四自由度机械臂、金属底盘组成。
STM32单片机作为控制核心,根据接收到的各模块的数据信息,发送相应控制指令。
WiFi视频数据传输模块是利用无线技术进行无线传输的一种模块,主要由发射器,接收器和控制器组成。
二自由度云台是一种安装、固定摄像装置的支撑设备,用于摄像装置与支撑物的连接,主要用于需要进行运动图像捕捉的场合或环境,是采集方式更方便直接,在需要摇摆和摆动的机构中,如机械臂也利用云台来实现可接触范围的延伸和扩展。
四自由度机械臂主体结构有四个自由度,主要由旋转关节组成,具有与人的肩、肘、腕相对应的关节,更加接近于人的手臂。四自由度机械臂是本设计方案的重要研究对象。机械臂运行轨迹追踪控制技术主要包括自适应控制,滑模变结构控制,鲁棒自适应控制和模糊自适应控制[3]和经典PWM控制五大类。由于四自由度机械臂采用仿人类手臂设计,灵活度高,所以本设计方案对机械臂采用PWM控制,这种控制方法的优点是控制精度高。
电机驱动模块:采用8路舵机组成。
电源采用12V锂电池组,对机器人进行供电。
3.2 货物抓取机器人软件总体方案设计
货物抓取机器人软件设计是按照模块化的思想完成的,采用C语言编写。设计内容包括基于STM32单片机控制系统的主程序,电机驱动子程序、四自由度机械臂控制子程序,WiFi通讯子程序、手持终端控制子程序。
STM32单片机在处理传感器采集的信息后,通过串口通信送达调用舵机控制器中的动作指令,舵机控制器控制四自由度机械臂对货物进行抓取。
拟通过三个层面来实现上述功能:
(1)底层电机驱动层,以STM32单片机实现对小车的驱动控制。该层主要设计电机驱动控制子程序和四自由度机械臂子程序。电机驱动控制子程序可以采用PWM算法实现对机器人底盘运动的控制。四自由度机械臂子程序中运用PWM控制算法,使用PWM调速方式对各关节电机进行驱动,采用外环位置环与内环速率环的双闭环控制结构,对各关节的运动方向,角度等进行控制,以此来对机械臂进行整体控制,实现对货物的抓取。
(2)中层数据传输层,借助路由器平台传输控制命令以及视频传递。传输层是完成对控制命令的传输,是连接机器人和手机的桥梁,同时也负责视频画面的采集和编码。该层主要设计WiFi通讯子程序。通过这个子程序可以实现数据的传输功能。
(3)顶层终端控制层,通过手持终端实现对机器人的控制。采用eclipse编写Android程序,程序共两个Activity界面:设置界面和主程序界面。設置界面中设置服务器端IP,控制口号和视频传输端口号[4]。主程序界面中有前进/后退按钮,按钮用于向路由器端发送TCP数据,通过数据传输以实现对机器人的控制。
4 项目特色
本文设计的货物抓取机器人,集实时视频WiFi控制、四自由灵活抓取货物机械臂、二自由度云台搭载摄像头于一体,可以设置手持终端控制和自动控制两种控制方式对货物进行抓取。STM32单片机,是一种较为先进的单片机,不仅可以用寄存器进行编程,还可以使用官方提供的库文件进行编程。实时视频WiFi控制可以通过手机视频实时了解机器人位置并对机器人进行控制;选用四自由度机械臂,模仿人类手臂结构抓取货物更牢固;采用二自由度云台搭载摄像头,可以更灵活地控制摄像头来采集信息;8路舵机控制器对机器人进行驱动,机器人运动更加灵活且动力更加强劲,采用PWM控制技术对电机进行控制可以大大节省能量,具有很强的稳定性。综上所述,该货物抓取机器人的成本低,性价比高,操作方便快捷,可以大大节省人力资源,降低人力成本,同时提高工作效率,对物流行业发展乃至社会经济发展起到一定的推进作用。
参考文献
[1] 刘丽军.基于单目视觉的仓储物流机器人定位方法探讨[J].电子制作,2018(12):63-64.
[2] 王晴.应用单片机进行多自由度机械臂控制系统设计[J].邢台职业技术学院学报,2018,35(3):64-66.
[3] 宦婧,周伟祝,赵媛.基于智能感应的多自由度机械臂系统的设计实现[J].计算机与数字工程,2018,46(2):397-401.
[4] 杨勇.DIY基于路由器控制的wifi视频小车[J].电子世界,2018(23):143-144.
猜你喜欢
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
