
配重技术用于解决水轮发电机组振动超标的实践
2019-05-31 02:43:02曹铁山
水电站机电技术 2019年5期
曾 勇,张 红,曹铁山,江 雨
(三峡水力发电厂,湖北 宜昌443000)
0 引言
某水电站发电机结构型式为:立轴半伞式三部导轴承结构,其中,下导轴承在推力轴承之上,下导与推力采用推导联合轴承,转子为无轴结构,上端轴与下端轴直接与转子中心体相连。机组额定转速75 r/min,额定工作水头为80.6 m。
该电站8号发电机在汛期80 m水头下运行时,下导轴承摆度持续一级报警(报警值350 μm),达400多μm,偶尔达二级报警(报警值500 μm)。在蓄水升水位过程中,8号发电机下导摆度也未见好转。该振动不仅产生较大的噪声,而且会加速8号发电机下导轴承系统结构部件的疲劳破坏,降低机组的寿命。
1 配重前的变负荷、变励磁、变转速动平衡试验
为找到8号发电机下导轴承摆度过大的原因,对机组进行了变负荷、变励磁、变转速的动平衡试验和振动源分析,以判断机组是否存在水力不平衡、电磁不平衡或机械不平衡现象,然后决定是否进行配重处理。
配重前进行动平衡试验,试验数据见下页表1和表2,表中数据可以得出以下几点结论:
(1)在变负荷试验中,三部轴承的摆度,以及机架振动均变化不大:上导X向和Y向摆度均在200~250μm左右,下导X向和Y向摆度均在400~450 μm左右,水导X向和Y向摆度均在30~50 μm左右;而上下机架与顶盖的垂直和水平振动也基本不变。
在变负荷过程中,水轮机导叶开度变化引起过流部件水流变化,振动摆度转频成分的变化主要是由于水力不平衡引起,而试验数据表明机组负荷对振动摆度值影响不明显,说明机组无明显水力不平衡。
(2)在变励磁试验中,三部轴承的摆度,以及机架振动也都变化不大:上导X向和Y向摆度各在100 μm、130 μm 左右,下导 X 向和 Y 向摆度各在300 μm、200 μm 左右,水导 X 向和 Y 向摆度各在50 μm、20 μm 左右;而上下机架与顶盖的垂直和水平振动也基本不变。
在变励磁过程中,机组励磁和机端电压变化引起发电机电磁拉力变化,振动摆度转频成分的变化是由于磁拉力不平衡引起。而试验数据表明机组励磁变化对振动摆度值影响不明显,说明机组也没有明显磁拉力不平衡现象。
(3)在变转速试验的数据可以发现,机组在空转(无励磁、无负荷)的工况下,大轴摆度和机架等部位的振动就较大,而且振动幅值随转速增加而增大。在转速从100% Ne→56% Ne时:下导Y向摆度转频幅值从185 μm→60 μm,上机架水平振动的转频幅值从12.9 μm→4.35 μm,顶盖垂直振动的转频幅值从16.83 μm→4.98 μm,均与转速的平方成正比。同时在摆度频谱图(未附)中基本以机械不平衡引起的一倍频(1.25 Hz)为主。这些现象都满足发电机转子质量不平衡造成的振动摆度超标的特征。
(4)试验结论:综上8号发电机转子质量不平衡是造成机组振动的主要原因,可以通过配重来消除机械不平衡,降低振动,特别是对下导轴承摆度会有明显改善。
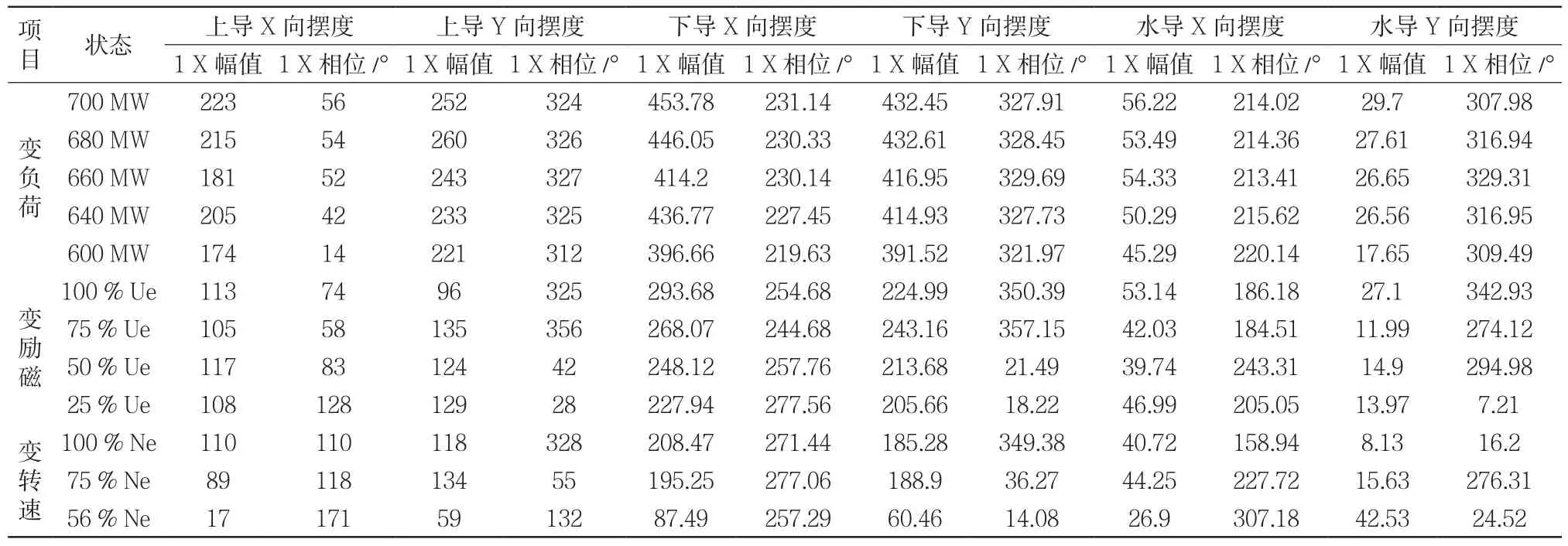
表1 配重前动平衡实验获得的三部轴承摆度数据(单位:μm)
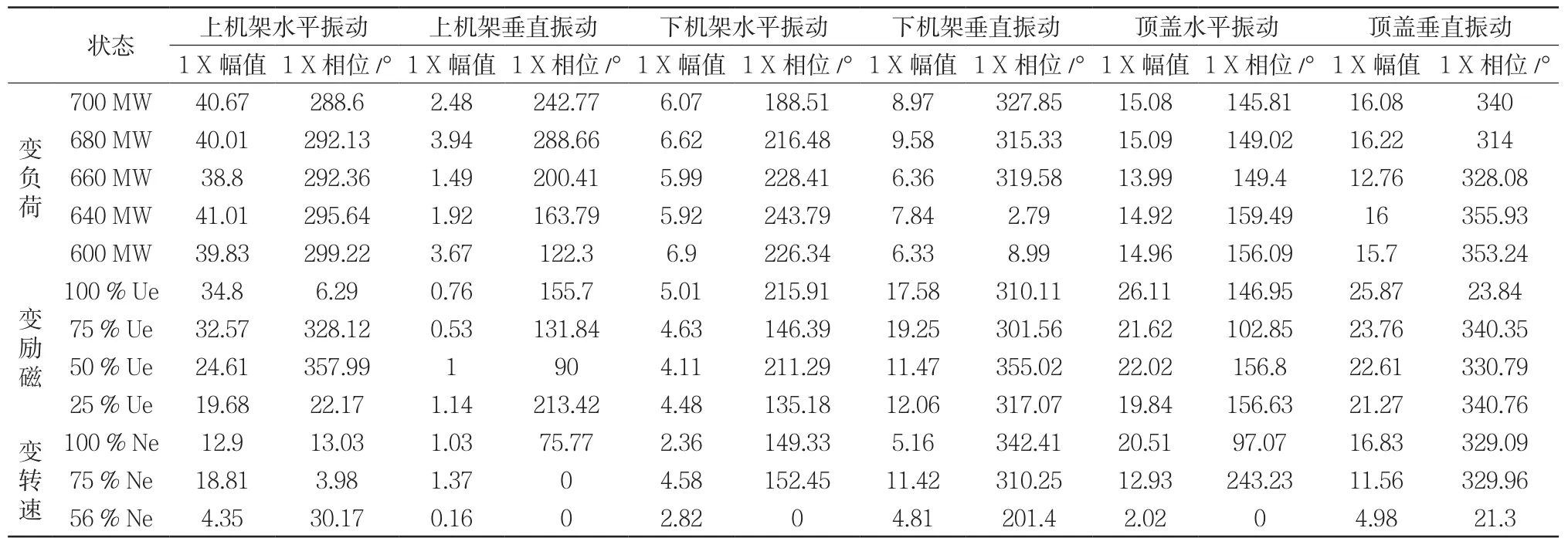
表2 配重前动平衡实验获得的机架振动数据(单位:μm)
2 配重处理
该电站采用TN8000振摆监测系统来进行机组状态监视。机组的三部轴承处,在+X和+Y方向安装有一体化电涡流传感器,测量大轴摆度及键相信号;在上下机架、顶盖等处的水平和垂直方向,都安装有低频速度传感器,测量上机架、下机架、顶盖、定子等振动。
在TN8000系统中,利用键相片及配套的键相传感器来测量相位,用以描述某一特定时刻机组转子的位置。该电站是在机组水车室水导轴承或者滑环室上导轴承处的大轴上焊接一个键相铁片,再用一个电涡流传感器探头对准键相片装设高度处的大轴,这样,当传感器探头探到键相片时,前置器输出一正脉冲,即可知道当前转子所处的位置。在两个脉冲之间即为一转,因而键相也用于TN8000系统测量机组转速。
键相器及相角测量原理见下页图1,在时间t0时刻,键相器传感器探头正好对准轴上的键相片,在这一瞬时产生一正脉冲,当顺时针转过φ角,由质量不平衡引起的“重点”处于测振传感器探头之下,轴距离探头最近,这相当于振动信号中正峰值那一点即A点。由图1可以知道,从键相信号到第一个正峰高点A之间的角度即φ角,φ角加上测振探头与键相器探头之间的夹角即是“重点”与轴上键相片之间的夹角,由此用键相片为参考点找到不平衡质量的位置。
TN8000中已考虑传感器安装位置,一倍频相位即指转频下振动最大点与键相片之间的夹角。为了平衡该方向的质量不平衡,则需要在对应反方向增加配重块予以抵消,因此实际的配重角度为所测相位减去 180°。
找到不平衡点的相位后,再根据对应所测的振摆幅值,利用与振摆有关的经验公式,可以计算得到试重块的质量:
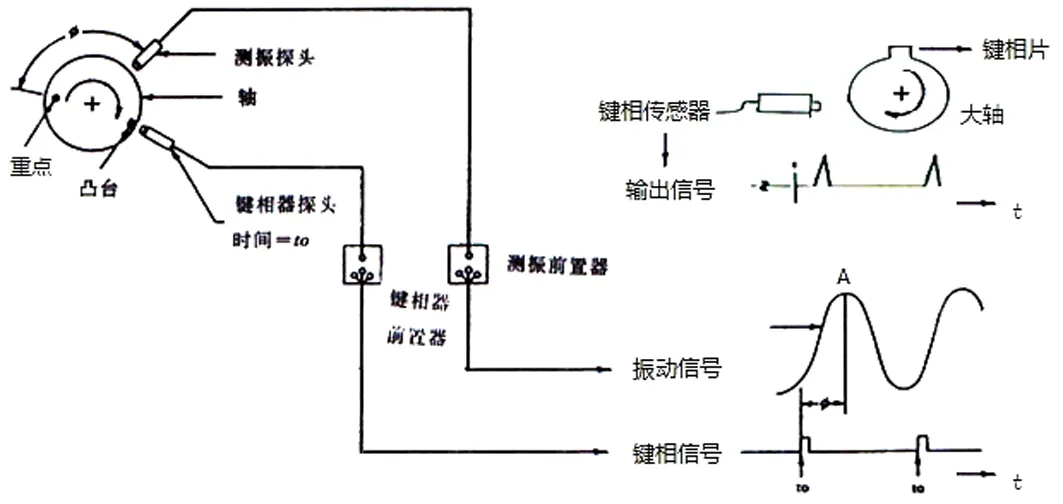
图1 键相器原理及相角测量
其中P-试重块重量(kg),V-机组配重前最大振幅峰峰值(μm),M- 转子重量(kg),R- 配重半径(cm),n- 额定转速(r/min),0.45为经验系数。
2.1 试配重的位置和重量
在进行变负荷、变励磁、变转速试验之后,进行了试配重。根据表1试验数据,选取带负荷运行时,工况最差的下导Y向摆度值为计算依据。可以看出,质量不平衡引起的转频分量摆度值在425 μm左右,相位出现在325°附近。利用经验公式计算得到试重块的重量为:

其中:VGS机组转子质量1 827×103kg,配重块焊在磁轭处的支臂上,即配重半径为转子半径889.5 cm。
振幅最大值相位离键相片角度为325°,配重块应在与之相反的位置以抵消转子不平衡力对转子的负面影响,即配重角度应为 325°-180°=145°。根据现场实际情况,试配重70 kg,配重位置选在以键相片为基准俯视逆时针145°,该处磁极背面的转子支臂上。
试配重后,8号发电机开机空载和带负荷运行,检查配重的效果,数据见表3。

表3 第一次配重后空载、带负荷运行时三部轴承摆度(单位:μm)
通过对比表3和表1的数据可以看出,除水导轴承摆度略有升高外(但也未达到一二级报警值280/400 μm),其他各部轴承振动摆度情况均有改善,特别是上导和下导轴承摆度,相对于配重前对应工况有明显改善,下导X、Y向转频摆度,均下降了100 μm左右,上导X、Y向转频摆度,也下降了50~100 μm左右。说明试重正确,对抵消不平衡力起到了效果。同时,对比配重前后转频幅值对应的相位基本没变,说明试配重的位置选择是正确的,配重前的不平衡重点、配重点以及轴心共线,没有引起不平衡重点的偏移。
2.2 正式配重的位置和重量
实际数据证明试配重选择的位置和重量是正确、合理的。70 kg的试重块让下导轴承摆度下降了100 μm左右,根据经验,在相同位置继续配重140 kg可以预期让下导轴承摆度再下降200 μm左右。随后在和第一次同样的位置,再次配重140 kg,并将配重块满焊,经探伤检查合格。
正式配重后,8号发电机开机空载和带负荷运行,试验数据见下页表4。
通过对比表3和表4数据可以看到正式配重后,下导X、Y向转频摆度,再次下降了150 μm左右,上导X、Y向转频摆度,再下降了100 μm左右,比预期值稍小一点,但同样取得理想效果。配重前后8号发电机下导和上导轴承摆度变化情况见图2和图3。
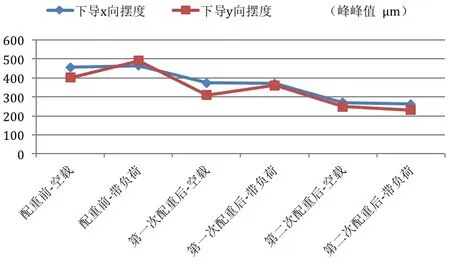
图2 配重前后8号发电机下导轴承摆度变化情况
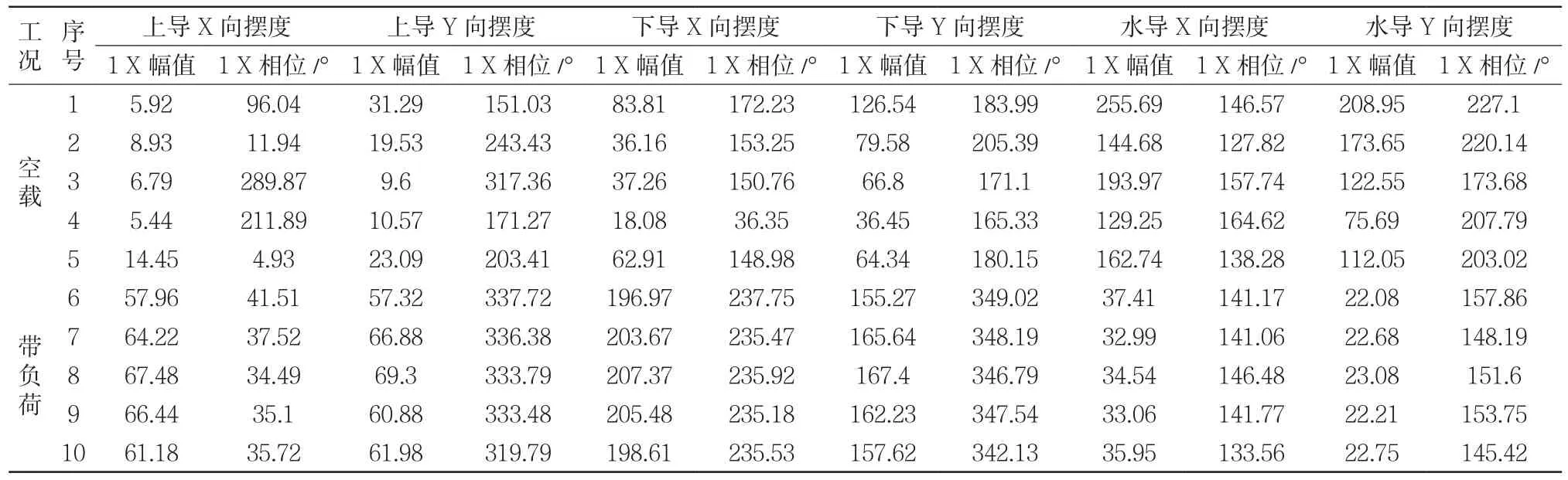
表4 正式配重后空载、带负荷运行时三部轴承摆度(单位:μm)

图3 配重前后8号发电机上导轴承摆度变化情况
3 结论
8号发电机经过两次配重后,下导X、Y向转频摆度,下降了250 μm左右,上导X、Y向转频摆度,下降了200 μm左右,发电机动平衡情况明显改善,机组运行稳定,配重效果显著。
猜你喜欢
小学生作文·小学低年级适用(2024年5期)2024-06-01 16:09:15
水电站机电技术(2023年10期)2023-11-16 01:38:14
大电机技术(2022年2期)2022-06-05 07:29:02
家庭影院技术(2019年12期)2020-01-19 02:07:20
课堂内外·创新作文小学版(2017年1期)2017-06-01 14:44:51
工业设计(2016年4期)2016-05-04 04:00:27
作文周刊·小学一年级版(2015年13期)2015-05-30 21:33:17
水电站机电技术(2014年6期)2014-09-26 12:07:45
湖南水利水电(2014年2期)2014-02-27 14:45:43
上海金属(2013年6期)2013-12-20 07:58:02
