
基于动态轮廓误差估计的三轴运动平台NNLARC控制∗
2019-05-29 01:28王丽梅孙宜标
制造技术与机床 2019年5期
王丽梅 赵 晨 孙宜标
(沈阳工业大学电气工程学院,辽宁沈阳110870)
随着工业制造技术及自动化技术的快速发展,对于实现高精度加工的要求越来越高,轮廓误差是评价加工质量的重要指标[1-4]。因此,实现三轴运动平台对轮廓的精密跟踪是主要控制目的。由于系统在各轴间的动态特性不匹配,只提高单轴的跟踪精度并不能有效减小轮廓误差,为得到期望的轮廓加工精度,在轮廓加工中需要解决两方面问题:轮廓误差估计和轮廓误差控制[5]。对于轮廓误差估计,文献[6]基于直线轮廓误差计算方法,利用直线逼近方式进行空间曲线的轮廓误差估计。文献[7]采用二阶估计方法,通过研究点-曲线距离函数的微分特性,利用距离函数的Taylor展开进行轮廓误差的估计;文献[8]采用任务坐标系方法建立轮廓误差,将原来在笛卡尔坐标系下的跟踪误差在任务坐标系中解耦成法相误差分量和切向误差分量,法向分量近似为轮廓误差。上述几种静态轮廓误差估计算法,通常利用参考位置与实际位置和速度的几何关系进行误差估计,基于具有不同精度的Taylor级数展开进行轮廓误差估计。而Azad Ghaffari提出一种基于牛顿极值搜索算法的动态轮廓误差估计方法[9-10],将当前位置和参考轮廓之间的距离近似为具有与轮廓误差相关联的局部最小点的函数,用极值搜索算法来找到轮廓误差的位置和值,进一步提高估计的精度。
对于轮廓误差控制方面,为保证三轴运动平台伺服性能,要保证系统具有快速跟踪和抗干扰的能力。由于永磁同步直线电动机(PMLSM)易受系统存在的参数变化、外部扰动及非线性摩擦等不确定性因素影响,为抑制不确定干扰的影响,文献[11]采用扰动观测器(DOB)利用实际系统与参考模型输出差异,进行扰动的抑制和补偿;文献[12-13]采用自抗扰控制器(ADRC)通过扩张状态观测器估计内部不确定性和广义扰动,由于实施简单,实用性强已经广泛应用。RBF神经网络(RBFNN)可以通过学习机制使用输入-输出数据来对任意的非线性映射逼近进行扰动抑制。相比于ADRC和DOB,神经网络可以作为补偿器与其他控制器相结合,其有效性不依赖于精确模型。因此,将RBF神经网络(RBFNN)的非线性逼近能力引入到具有良好跟踪能力的自适应鲁棒控制(ARC)中,实现系统的良好跟踪能力的同时,提高系统鲁棒性。由于NNLARC只能完成对单轴的控制,对于轮廓误差的动态特性是未知的,为解决这一问题,采用预补偿的方法,将轮廓误差直接对位置环参考输入进行修正[14]。在预补偿方式下,提高系统的轮廓加工精度。
1 永磁同步直线电动机的数学模型
三轴运动平台数控系统是由三台轴向方向相互垂直的 PMLSM组成,用来完成精密轨迹的加工。PMLSM 在j(j=x,y,z)轴运动方程表示为:

其中:p表示被控对象的实际位置;Mj表示PMLSM动子和动子所带负载的总质量;Fj为所有不确定非线性,如摩擦力Ffj,外部扰动dj。摩擦的模型为速度的函数,其中:Afj是库仑摩擦项的未知静态值;Sfj是连续函数;Bj为粘滞摩擦系数。非线性扰动dj,包括负载扰动和未建模扰动。
其中:Uj=Kfjiqj为控制的输入。
2 动态轮廓误差估计方法
在三维轮廓控制中,参考轮廓已知,可用T参数化表示:Rd(T)= [R1(T),R2(T),R3(T)]T,伺服系统实际位置可以根据时间t参数化为:P(t)=[p1(t),p2(t),p3(t)]T,系统当前的位置可以表示为P(mts),ts为系统的采样周期,m为时间步数。所以,当前位置到参考轮廓的距离可以表示为:

令ξ(T)在参数取值为T∗时得到最小值,因此轮廓误差可表示为:

其中:Rd(T∗)为轮廓误差点,由以上定义得到的三轴运动平台轮廓误差如图1所示。

定义目标函数为:



其中,i表示牛顿算法的迭代数。
对目标函数(5)进行求导,可以得到:

由于轮廓误差ξ值非常小,并且曲线光滑,因此目标函数二阶微分可表示为
因此,式(7)可以表示为:

若出现如图2所示的轮廓,目标函数将会出现多个极值点,由于基于牛顿的轮廓误差估计结果是局部的,可以使参数T是随时间递增的,这样可以避免收敛到错误的点。

3 NNLARC控制器的设计
3.1 NNLARC中自适应鲁棒控制器
由于在三轴中采用相同的控制方法,所以只对x轴进行分析,PMLSM在x轴的状态空间方程可以表示为:

定义参数向量θ=[θ1,θ2,θ3]T∈R3,其中θ1=M,θ2=B,θ3=Af,通过参数线性化得到系统被控对象模型为:

首先作如下假设,系统中的不确定参数和扰动是有界的,并且边界已知,即

其中:θmin=[θ1min,…,θ3min]T,θmax=[θ1max,…,θ4max]T和δd是已知的。

式中:τ为要合成的自适应函数;Γ为正定对角矩阵;(·)为向量的投影算子,并且满足

该映射具有如下的性质

定义一个类似滑模面的变量为:

其中:e=Rd-p为单轴输出跟踪误差,k1为任意正的反馈增益。
将式(17)代入式(11)中可以得到:

式中:ϕT=[-,-x2,-Sf(x2)],式(14)中自适应函数选为τ=ϕS。将式(18)中控制量的输入u设计为:

式中:ua为参数自适应部分;us=-ksS为线性反馈部分;un是神经网络的输出。将式(19)代入式(18)中可以得如下等式:

根据式(12)和式(13)中描述的不确定参数的有界性,存在un的最优值u∗,并且满足以下条件,即:

式中:ζ1为任意小的正实数;un对参数自适应误差ϕT和扰动进行补偿。
3.2 NNLARC中RBFNN控制器设计
RBF具有万能逼近特性,它能以任意精度逼近任意连续函数。故考虑采用RBF网络对不确定项进行自适应逼近。
在 RBF 结构中,X=[Rd,]作为网络的输入向量,hn(X)∈Rr为高斯径向基函数,可以表示为:
式中:r为神经元的个数;cn和bn分别为高斯函数的均值和标准差。
输出信号为加权线性组合,即:

其中:wn表示在n个隐含层神经网络的权值。用神经网络当作补偿器,输出信号用于逼近模型误差和扰动d,所以式(21)可以重新表示为

假设ζ2为足够小的实数,若在隐含层中有足够多的神经元,可以使ζ2的绝对值任意小,即:

神经网络的输出可以表示为:


其中:=W∗-表示W∗的估计误差,将式(27)代入式(21)可以得到:

其中:ζ为很小的值,表示神经网络建模后残留的建模误差。为消除误差un被重新设计为:

其中:zdtanh [(S·zd)/η]为简单鲁棒补偿;zd为系统扰动上界函数,满足是任意正实数。RBFNN在线权值向量更新律为:

其中,φ=diag[φ1,φ2,…,φr]表示 RBF 神经网络的学习率。
NNLARC控制系统结构图如图3所示。
4 位置环交叉耦合控制器设计
为了提高轮廓的加工精度,通过位置环交叉耦合控制方式将轮廓误差直接对参考输入进行修改,因此在这种方式下,等效参考值可以看作参考输入和轮廓误差的组合。在位置环交叉耦合控制下,能有效减小轮廓误差。 低通滤波器Q(s)= (2πfs)2/s2+2ζ(2πfs)s+(2πfs)2,ζ为阻尼比,fs为截止频率,G(X)表示在各轴位置环的控制器,系统的总体结构如图4所示。


5 仿真结果与分析
为验证所提方法的有效性,采用日本 Yokogawa LM110系列直线电动机驱动三轴运动平台进行仿真研究。 电动机参数分别为Mx=5.8 kg、My=5.8 kg、Mz=1.4 kg,Kfx=Kfy=10.979 N/A、Kfz=0.852 N/A,Bx=By=244.3 N·s/m、Bz=82 N·s/m,外部扰动用自适应鲁棒部分进行估计,设初值为0。参数初始估计(0) = [5.8,2.443,0.37,0]= [5.8,2.443,= [1.4,0.82,0.37,0],参数边界值设为θ1max=θ2max=[7,4,1.5,12] 、θ3max=[1.8,0.7,1.5,12],θ1min=θ2min= [4,1.5,0.2,0]、θ3min= [1.2,0.3,0.2,0]。
自适应律参数选为Γ=diag[10,10,10,1 000],K1x=3 000,K1y=2 000,K1z=3 000 线性反馈增益为Ksx=1 500,Ksy=800,Ksz=1 200,神经网络隐含层个数为11个,即r=11;对于RBFNN结构参数通过如下方式获得,使用K-means聚类方法获得中心向量cn,并且其中dmax是所选中心中的最大欧几里得距离,学习率选为500,牛顿算法迭代数i=10,ζ为0.7,fs为25 Hz,Sf(x2)= (2/π)arctan(1 000x2)。 为便于比较,自适应鲁棒器采用相同参数。
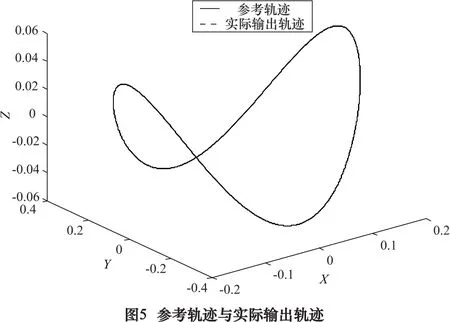
为证明提出方法的有效性,系统对马鞍形曲线进行仿真,曲线在三轴分别表示为Rx=0.2cos(2πT),Ry=0.3sin(2πT),Rz=0.05cos(4πT)。
可以得到如图5所示参考轨迹与实际输出轨迹图。可以看到参考输入与实际输出轨迹基本重合,可以证明NNLARC控制的X轴、Y轴、Z轴具有较好的跟踪能力。
为了验证所提出方案的有效性,将所提出的方法与ARC控制器进行比较、图6、7、8为在位置环分别采用NNLARC控制器和ARC控制器时在单轴的跟踪误差曲线;为了验证系统的抗干扰能力,在4 s时向各轴突加100 N的阶跃扰动,并对4 s后单轴的跟踪误差进行分析如表1所示。从表1可以知道出基于NNLARC控制器控制的PMLSM位置跟踪误差在突加扰动后,能使跟踪误差控制在±4 μm范围内,具有更好的跟踪精度满足伺服系统对高精度的要求。另外,从图6~7,图8可以看到,在系统突加扰动时,所设计NNLARC能使位置跟踪误差快速趋于零,具有较强的鲁棒性。
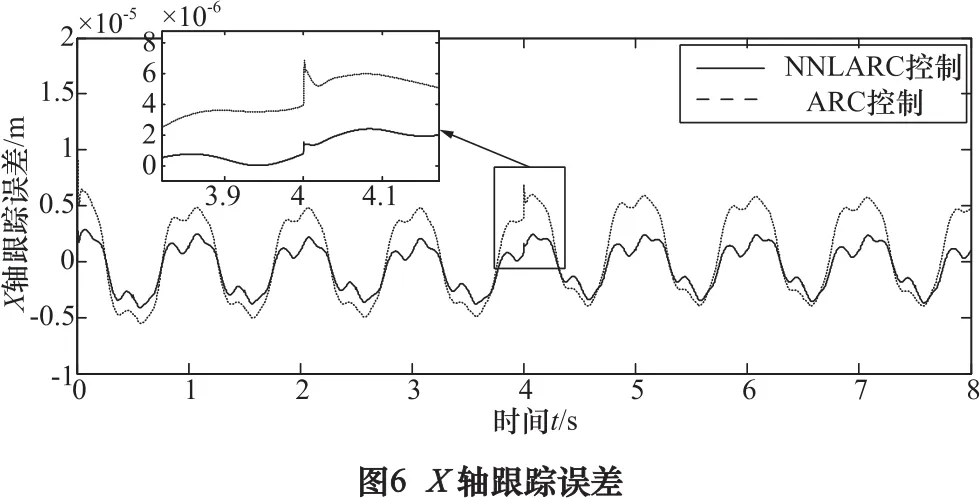
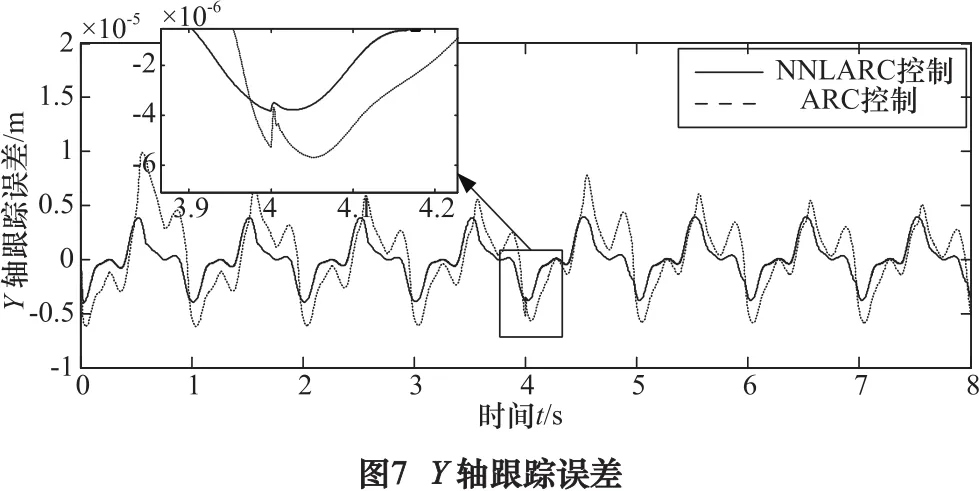

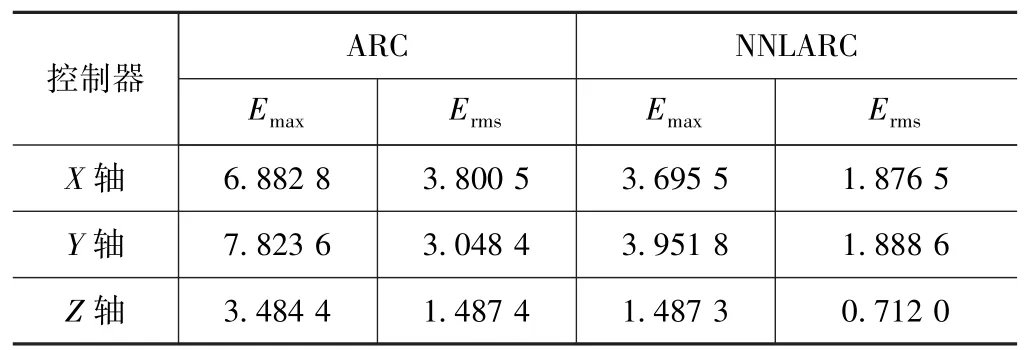
表1 不同控制器跟踪性能比较 μm
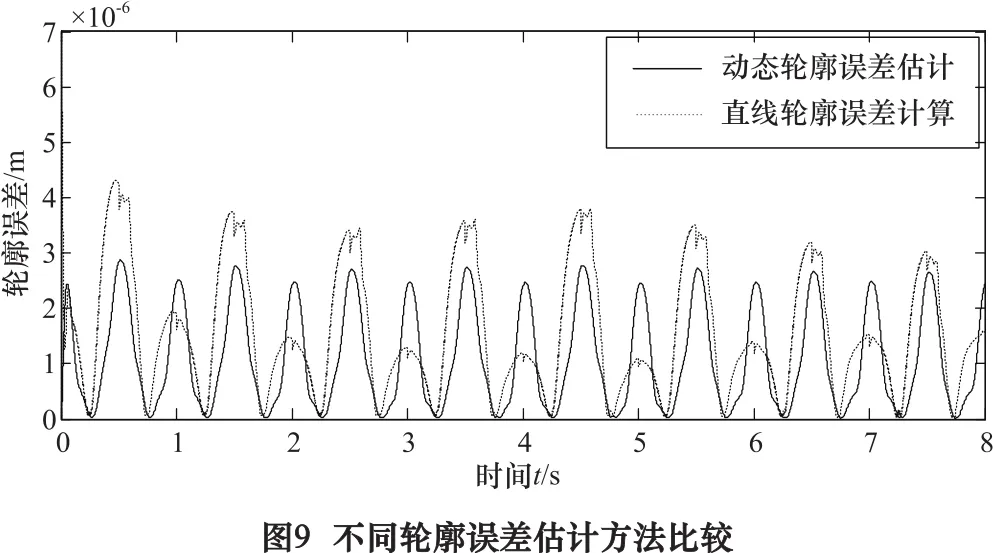
另外,在单轴均采用NNLARC控制方法,将基于动态轮廓误差估计方法与传统的基于直线轮廓误差计算方法相比较,直线轮廓误差计算的交叉耦合增益值取值为2,则可以得到如图9所示的结果。采用传统方法估计得到的最大轮廓误差为8.360 7 μm,轮廓误差均方根为1.953 8 μm,而本文采用的动态轮廓误差估计得到的最大轮廓误差为2.875 9 μm,轮廓误差以得到传统的矢量计算方法均方根为1.424 5 μm。仿真结果表明,采用的动态轮廓误差估计法实现更精确轮廓误差估计,实现更高精度的轮廓加工。
6 结语
针对三轴运动平台系统中存在的外部扰动、摩擦力等因素影响,本文提出的NNLARC控制方法不仅能使单轴实现高精度的跟踪,而且通过RBFNN部分能够有效的对不确定扰动进行补偿,提高系统抗干扰的能力。为了进一步提高系统的轮廓精确度,提出动态轮廓误差估计方法,相比与传统的静态轮廓误差估计方法,能实现更高精确的轮廓误差估计,进行空间模型高精度加工。通过仿真比较可以发现,提出的方法能有效提高三轴运动平台的加工的精度,实现系统高精度加工。
猜你喜欢
北京航空航天大学学报(2021年7期)2021-08-13
矿产勘查(2020年2期)2020-12-28
装备制造技术(2020年1期)2020-12-25
潍坊学院学报(2020年6期)2020-11-22
空间科学学报(2020年6期)2020-07-21
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年1期)2019-05-21
中国惯性技术学报(2019年6期)2019-03-04
中国交通信息化(2017年4期)2017-06-06
汽车电器(2014年5期)2014-02-28
