末制导雷达抗拖曳式干扰的方法研究
2019-05-28 06:34:10陈伯孝刘玉静朱东晨
制导与引信 2019年3期
陈伯孝, 刘玉静, 朱东晨
(1.西安电子科技大学雷达信号处理国家重点实验室,陕西 西安710071;2.毫米波遥感技术重点实验室,北京100854)
0 引言
在现代及未来战争中,精确制导导弹是主要的作战武器之一。然而,导引头末制导雷达面临的电磁干扰环境复杂多变,抗电子干扰和低截获概率等电子战性能已成为现代先进导引头的最重要的技术指标之一。因此,研制新体制高性能的先进雷达导引头已成为十分迫切的任务。在实际作战中,末制导雷达面临的干扰样式主要包括各种无源干扰和有源干扰。近年来,对拖曳式干扰及其对抗方法的研究成为了雷达抗有源干扰领域的一个重要课题。而拖曳式干扰作为有源噪声压制式干扰的一种,干扰和目标位于同一个主波束内,而且在时间上遮蔽了目标回波信号,这样会导致信干比的严重下降,进而造成显著的测角偏差,导弹不能有效跟踪目标,失去作战效能。在雷达导引头天线波束宽度一定条件下,在时域、频域和空域均难以抑制干扰。
目前,具有极化测量能力的雷达逐渐成为雷达技术的主流方向之一,利用极化信息可以提高雷达抗干扰、检测和识别等能力[1-3]。极化滤波技术是一种重要的抗干扰方法,它基于目标和干扰信号的极化域特性差异,可以有效地从极化域抑制干扰。文献[4-6]提出了虚拟极化适配、单凹口极化滤波器和多凹口逻辑乘极化抑制滤波器、非线性极化矢量变换等概念,并将其用到极化抗杂波干扰技术中。文献[7-9]中对高频地波雷达的极化滤波问题进行了深入研究,提出了序贯极化滤波,极化域-频域联合抑制多干扰等方法。文献[10]对自适应极化滤波器的理论性能进行了分析。文献[11]研究了高分辨极化雷达检测中极化滤波器的选择问题。文献[12]提出了一种基于极化二元阵的空域虚拟极化滤波算法。文献[13-15]中结合斜投影算子,提出了一种零相移的极化滤波方法。
本文为了对抗弹载雷达中的拖曳式干扰,将极化滤波技术应用于末制导雷达中,建立了弹载单脉冲雷达的全极化接收信号模型,分析了干扰的极化参数估计方法,并利用极化滤波方法对拖曳式干扰进行抑制,最后进行单脉冲测角。
1 信号模型
目标和拖曳式诱饵干扰如图1(a)所示,雷达位于坐标原点。假设目标沿着y 轴反向运动,目标和干扰之间的揽绳长为D。雷达和目标之间的距离为RT,和干扰之间的距离为RJ。目标的方位和俯仰角分别为θT和φT,干扰的方位和俯仰角分别为θJ和φJ。那么目标和干扰的角度关系满足下式:

图1 目标和干扰空间示意图
为了分析方便,本文只考虑方位角,此时目标和干扰如图1(b)所示。单脉冲雷达的天线阵为一种正交半波振子为单元组成的双极化天线阵列,天线阵面如图2所示,包含水平极化和垂直极化阵子,不考虑天线单元之间的互耦,天线可以在空间一定角度范围内进行相位扫描。雷达工作时,可以任意设置水平极化天线或垂直极化天线为主天线,其余的为辅助天线,由主天线发射信号,辅助天线只接收信号。不妨设水平极化天线为主天线,而垂直极化天线为辅助天线,由水平极化天线发射信号,发射信号为s(t)。每个天线均包含和、差通道,两个天线和、差通道的归一化方向图函数均相同,和通道的归一化方向图函数为FΣ(θ),差通道的归一化方向图函数为FΔ(θ)。水平极化天线的极化方式为hH=[1,α]T,垂直极化天线的极化方式为hV=[α,1]T,α 为天线交叉极化分量,当天线的极化纯度较高时,例如天线的极化隔离度为30 dB,此时α 可以近似为0。
式中:βT和βJ是与天线增益,空间传播损耗等有关的复常数;nΣh(t)和nΔh(t)分别为和、差通道的噪声,均为零均值的高斯白噪声。
假设两天线的天线增益相同,那么垂直极化天线的和、差通道的接收信号分别为
式中:nΣv(t)和nΔv(t)分别为和、差通道的噪声,均为零均值的高斯白噪声。式(5)中第1项均为目标信号,第2项均为干扰信号。
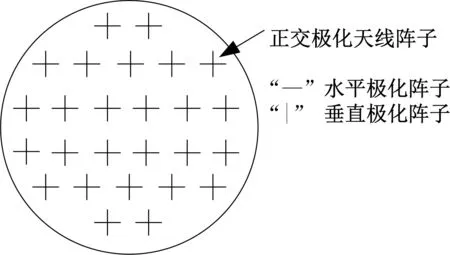
图2 双极化天线阵面图
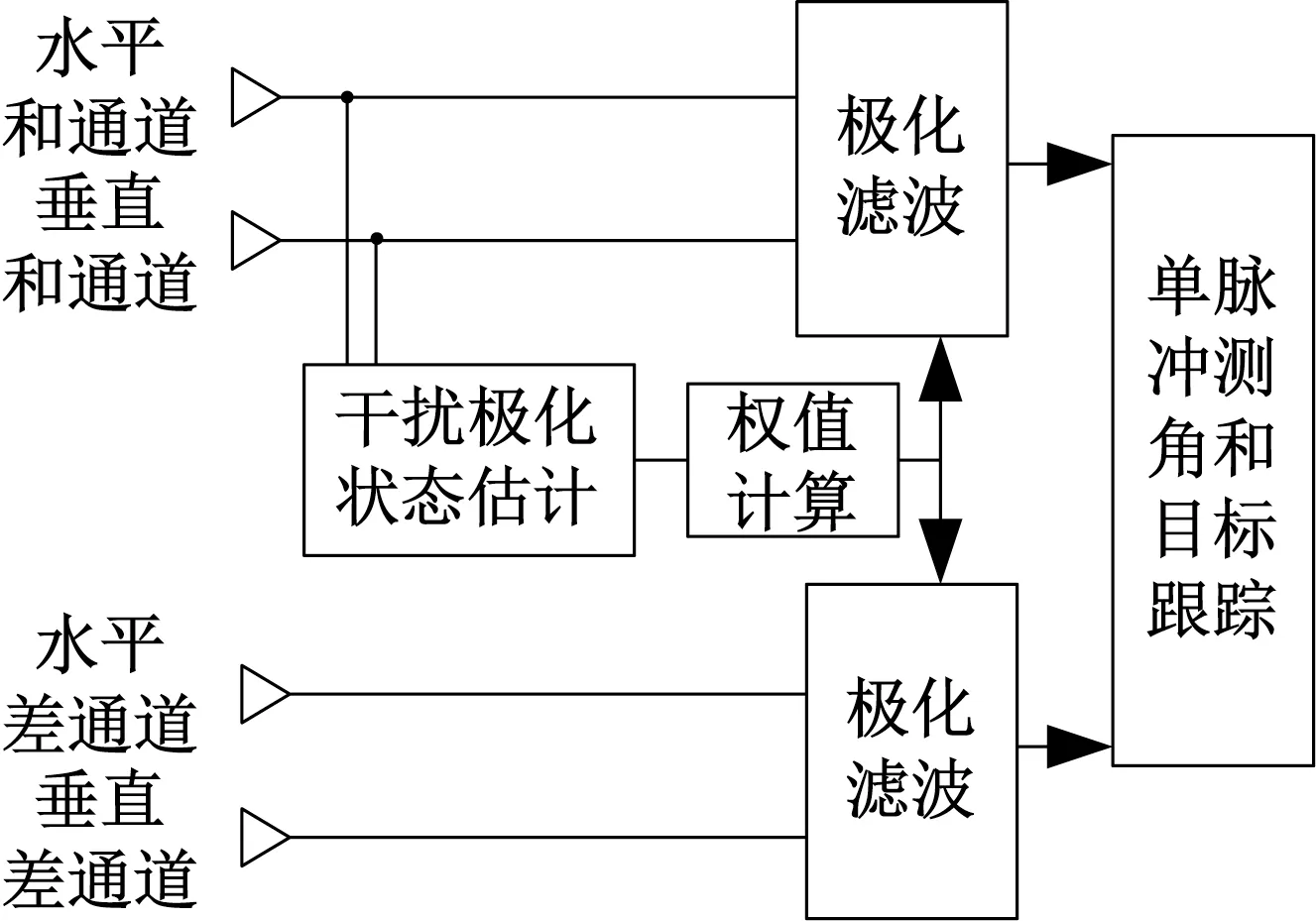
图3 信号处理流程图
2 极化滤波算法
由于在整个脉冲重复周期内,干扰信号所持续的时间一般要大于目标回波信号,在仅有干扰信号的距离单元内,对全极化回波信号进行采样和极化状态估值,可以获得极化滤波器矢量参数。在理想情况下,各路和、差通道满足幅相一致性要求,那么和、差通道极化滤波器参数相同,所以仅用和通道进行极化参数估计。


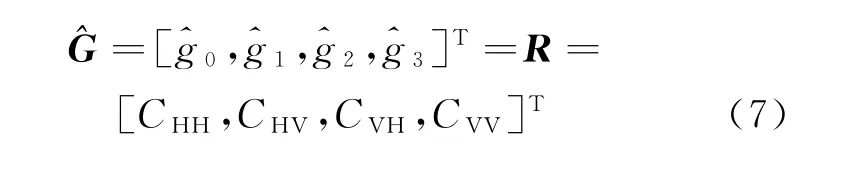
根据极化相干矩阵和Stokes矢量之间的关系[16],可以得到干扰极化的Stokes矢量的估计值为
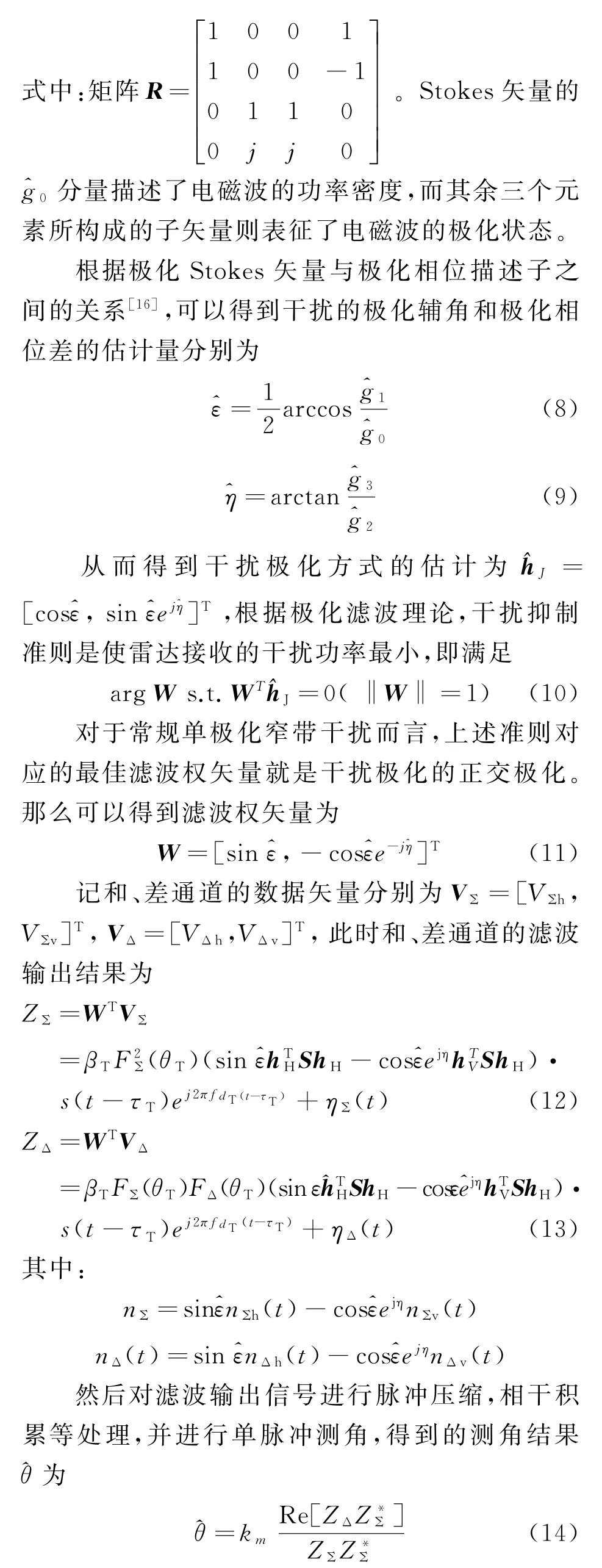
式中:km为鉴角曲线的斜率。
综上所述,可以得到信号处理流程如图3所示。取水平极化天线的和通道和垂直极化天线的和通道的干扰数据,进行干扰的极化方式估计,然后设计滤波权值抑制干扰。而差通道也利用同一组权值进行干扰抑制,将和、差通道的滤波输出结果分别进行脉冲压缩和相干积累,然后进行单脉冲测角和目标跟踪。
3 干扰抑制性能分析
由于目标的极化散射特性随着雷达视角和目标的姿态而改变,在实际中,目标的极化散射特性并不已知。在理想情况下,天线的极化纯度较高,即α=0。目标的极化方式为hs=ShH=[shh,svh]T,而极化滤波的权矢量满足
而实际中,当目标为大型目标,且反射面为光滑平面时,目标散射的交叉极化分量一般都远小于主极化分量[16],即svh≪shh,并不满足与干扰极化方式正交的条件。所以在进行极化干扰抑制之后,信噪比会存在一定损失,此时对测角性能产生影响。为了降低干扰对消对后续测角结果的影响,需要增加相干积累的脉冲数来弥补信噪比损失。
4 计算机仿真
目标极化hs归一化相关系数为0.88,即相关性较强。主、辅天线的天线方向图为高斯方向图,波束宽度为8°。两天线的极化隔离度均为30 dB。
图4所示分别为水平极化天线的和、差通道在干扰抑制前后的信号进行脉冲压缩得到的结果,可以看出在干扰抑制前目标淹没在干扰中,而在进行干扰抑制后,能够发现目标峰值。
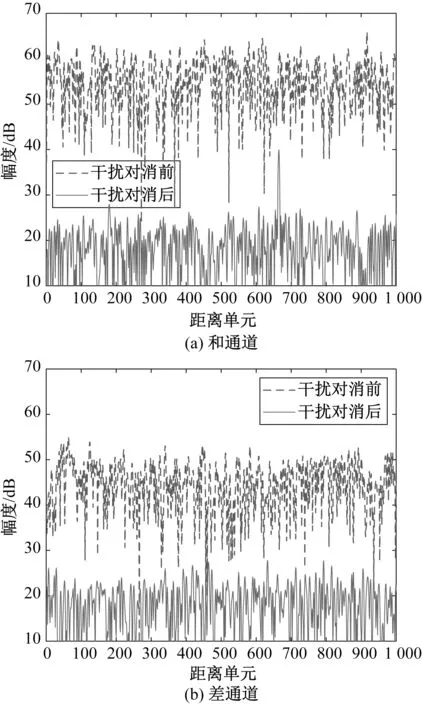
图4 水平极化天线干扰抑制前后的脉冲压缩结果
进一步,假设目标与干扰极化状态完全正交,则假设目标极化散射矩阵为hs= [1,-0.8j]T,保持其他参数不变。此时,根据式(16),此时干扰极化hj与目标极化hs归一化相关系数为0.11,即相关性较弱(接近正交)。
由图5可以看出,当目标与干扰极化越接近正交时,抑制干扰效果越好,目标信噪比损失越小。图5 中目标信噪比损失相比图4(a)要小3 dB左右。
假设目标的输入SNR 为(0~15)d B,而进行脉冲压缩的信噪比增益为20 dB。此时没有干扰和干扰抑制后的测角对比结果如图6所示,测角性能用角度测量的均方根误差来衡量,仿真中蒙特卡洛试验次数为200次。由图6可知,干扰抑制后的测角性能较没有干扰时的测角性能差,其原因是在极化滤波时会导致SNR 损失。
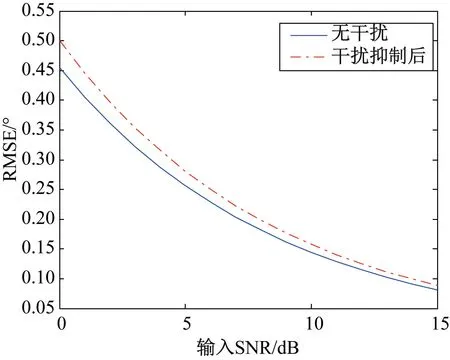
图6 测角性能与输入SNR 之间的关系
5 结束语
本文探讨了弹载雷达中利用极化滤波对抗拖曳式干扰的方法。建立了弹载单脉冲雷达的全极化信号接收模型,并根据和通道数据对干扰的极化方式进行估计,根据干扰和目标之间的极化特性差异设计极化滤波器对干扰进行抑制。当目标和干扰的极化差异越大时,即目标和干扰的极化相关性越低时,抑制干扰的效果越好,此时进行干扰对消损失的信噪比也越小。在未来的工作中,如何通过算法增大目标和干扰之间的极化差异获得更好的滤波输出性能,以及如何对抗多类型的干扰将成为进一步研究的工作。
猜你喜欢
现代财经-天津财经大学学报(2022年5期)2022-06-01 06:08:32
传感器与微系统(2018年11期)2018-10-26 09:38:06
航天电子对抗(2018年3期)2018-07-14 02:53:30
电子测试(2018年6期)2018-05-09 07:31:54
电子测试(2017年15期)2017-12-18 07:18:51
科技视界(2016年14期)2016-06-08 12:50:38
测绘科学与工程(2016年6期)2016-04-17 06:51:25
电源技术(2015年1期)2015-08-22 11:16:18
卫星电视与宽带多媒体(2014年2期)2014-04-29 15:57:19
雷达学报(2014年4期)2014-04-23 07:43:19