
面向视频侦查的偏色视频快速校正方法研究
2019-05-27 07:07郎宇博高宇杰
中国人民公安大学学报(自然科学版) 2019年4期
于 彤,孙 鹏,2,郎宇博,2,高宇杰
(1.中国刑事警察学院声像资料检验技术系, 辽宁沈阳 110854; 2.辽宁网络安全执法协同创新中心, 辽宁沈阳 110854; 3.山西省公安厅科技处, 山西太原 031400)
0 引言
视频侦查技术即根据视频记录的客观事实,结合时间与空间的逻辑关系,锁定与案件相关的目标物体,是案件侦破的重要手段之一[1]。近年来,视频采集设备日益普及,为视频侦查工作提供便利的同时,也极大提升了这种新型侦查手段在办案中的应用。目前,视频侦查主要依靠技术人员考量、筛选目标信息,借助人眼进行跨摄像头搜寻、追踪目标物。但人为进行影像资料筛选的方式,不仅无法实现犯罪目标的实时监控,还会因人类视觉感知系统本身带有的主观性导致错误的研判。随着计算机技术的发展,依据目标物固有特征,利用计算机进行目标自动检索、追踪的方法很好地解决了上述问题,而颜色特征因其较好的鲁棒性成为自动检测技术利用的主要特征之一。然而,现实中,受到相机感光设备、白平衡设置,以及视频获取环境光照角度变化的复杂性等因素的影响,视频不可避免的会出现偏色、曝光不足以及曝光过度等问题,严重影响了利用颜色特征进行目标追踪的准确性。为解决该问题,帮助侦查人员或自动检测机制更加迅速的定位嫌疑目标,需要对偏色视频进行预处理,即引入颜色恒常算法用于偏色视频帧的校正。
早期的颜色恒常性算法[2-3]一般用于全局校正,主要分为两大类:第一类由基于图像底层特征的算法组成,如Land和McCann提出的Retinex[4]算法、以retinex算法为基础的灰度世界(Grey-world)算法、Weijer等人提出的灰度边缘(Grey-edge)算法[5]等;第二类为基于图像信息学习的方法,如Forsyth提出的色域映射(Gamut mapping)算法[6],以及基于统计学理论和神经网络学习的算法等。现今全局算法越来越多的被用于偏色视频帧的局部分析,并提出了一系列改进算法,如基于层级分割的颜色恒常性算法[7]、基于小波变换的模糊图像增强算法[8]、基于偏色校正和信息损失约束的图像增强算法[9]等。
公安工作中,多需要处理复杂光照环境下拍摄的视频,且要求算法的处理速度较快。综合考虑以上因素,本文以运行速度较快、处理效果较好的SSR算法为基础,提出一种基于SSR算法的偏色视频快速校正方法,用于视频侦查过程中偏色视频的颜色校正预处理。实验结果证明,该方法能快速实现视频的颜色校正,为后续工作提供便利。
1 基于SSR算法的偏色视频快速校正
1.1 SSR算法
SSR算法是一种运行速度较快、物理意义明确的颜色恒常算法,其通过对目标点中心区域内的像素值加权得到目标像素点的灰度值,权重的比例大小由环绕函数确定。SSR算法的图像增强过程与人眼的视网膜和大脑皮层中神经元对外界物体感知的生理学模型十分相似,决定权重的环绕函数类似于自然视觉科学中常被用于模拟单个神经元反应的高斯差分函数。SSR算法能实现锐化加强、颜色恒定、动态范围压缩等一系列优化处理。图1为SSR算法的流程图。

图1 SSR算法流程图
使用该算法处理时,将偏色视频帧假设为空间平滑视频帧。设输入偏色视频帧为S(x,y),其由反射光视频帧R(x,y)和入射光视频帧L(x,y)两部分组成,由此推出SSR算法公式:
S(x,y)=R(x,y)L(x,y)
(1)
Retinex算法的物理模型如下图所示:
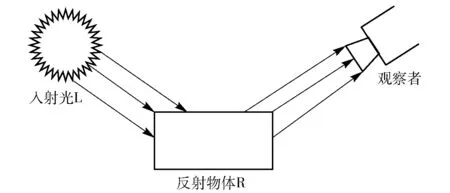
图2 Retinex算法物理模型
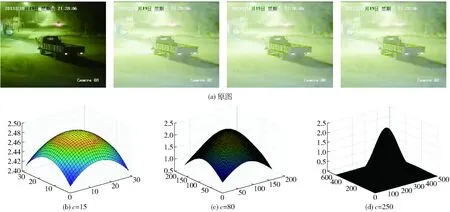
图3 不同尺度函数SSR的视频帧处理效果
入射光照射在反射物体上,通过物体的反射光线进入人眼成像,由公式(1)可得到物体特有的反射系数R(x,y),即:
R(x,y)=S(x,y)/L(x,y)
(2)
为了便于计算,对公式两边分别取log,得到:
(3)
其中r(x,y)为Retinex算法的理想输出结果。为了进行更合理的光照估计,SSR算法对视频帧每一点的像素值进行加权[10]:
L′(x,y)=F(x,y)*S(x,y)
(4)
“*”表示卷积运算,F(x,y)是环绕函数,可推得:
r′(x,y)=log (S(x,y))-log [F(x,y)*S(x,y)]
(5)
从公式(5)可以看出,反射光图像与光照空间无关,因此可以借助该式去除光照对视频帧的影响。常见的环绕函数有:
(6)
(7)
(8)
实践证明,高斯函数具有更好的校正效果,遂选用公式(8)中的环绕函数以保证校正结果具有较高质量。公式(8)中的常数c是高斯函数标准偏差,c的选择会直接影响图像增强效果,控制图像细节信息的保留度。图3为原规频帧、选用不同高斯函数标准差的SSR算法校正帧以及不同C值所对应的函数图像。
经过大量实验发现,c取值在[60-100]范围内时颜色校正效果较好,且观察上图可知,图(c)中的参数c实现了动态压缩和色彩保真之间的平衡,遂本文c取80。
1.2 基于SSR的偏色视频快速校正
设输入偏色视频为V(ti),i=(1,2,3…N),将视频解析成视频帧输入计算模型,用SSR算法对偏色视频帧进行处理,即:
V′(ti)=SSR(V(ti))
(9)
经本文算法处理得到的结果为:
r′(ti)=log(V(ti))-log[F(ti)*V(ti)]
(10)
对于灰度视频帧来说,直接对灰度值做上述处理即可。对于彩色视频帧,首先将视频帧分解为R、G、B三幅灰度视频帧,分别做上述处理,最后合成彩色视频帧。

图5 实验所用视频
方法流程图如图4所示。SSR算法的运行速度较快,将其应用于视频监控系统的实时色彩校正,不仅能在较短的时间内完成色彩校正的任务,还能输出较理想的结果。再将校正后的视频用于依靠人眼或计算机自动检索的后续视频侦查工作,就能最大程度避免因偏色带来的误导,使案件侦破得以顺利进行。
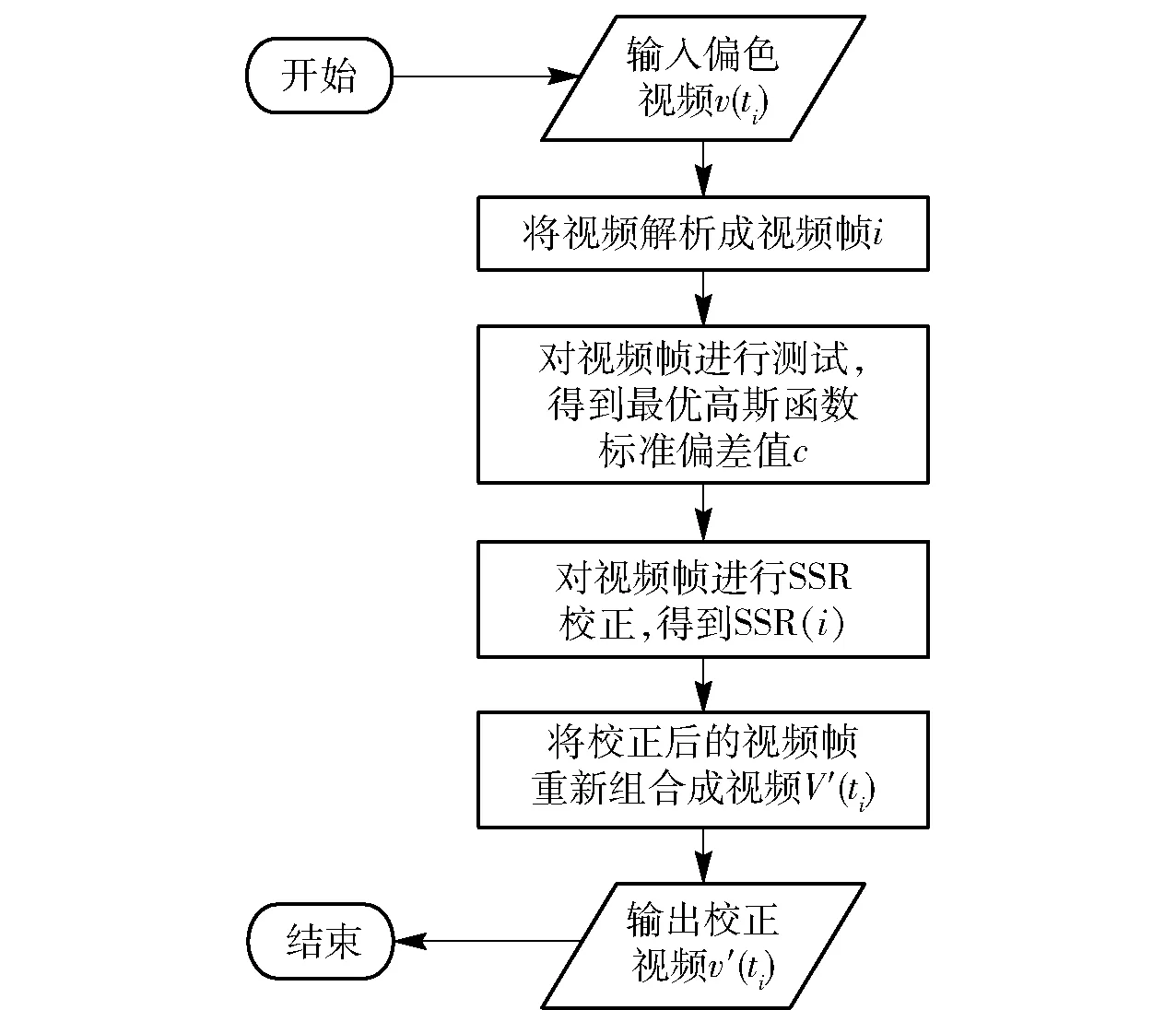
图4 基于SSR的偏色视频快速校正流程图
2 仿真实验
2.1 实验环境与对象
(1)实验环境
PC:HP Pavilion Notebook;操作系统:Windows家庭中文版;仿真编译环境:Matlab 2016b。
(2)实验对象
如表1所示,实验对象及其基本属性。实验视频来自于实际案件中采集的监控视频,如图5所示可以看到受到环境光照与成像设备的共同影响,视频出现了较严重的偏色现象,原本蓝色车辆呈现偏黄的颜色。
2.2 实验结果
在充分考虑相邻帧间相关性的基础上,设本文算法校正后的第一帧为参考帧,计算不同算法得到的校正帧与参考帧的偏色程度。偏色程度计算在CIE1976Lab色彩空间上进行,利用计算得到的两视频帧间的色差[11]作为评价偏色程度的标准。色差[11]是用数值的方法表示两种颜色在感观上的区别,色差越小,则两种颜色越接近。

表1 实验对象及其基本属性
首先将图像从RGB空间转换到Lab空间,转换包括两步:第一步是从24 bit真彩的RGB空间转换到XYZ空间,XYZ空间是一种设备无关的“过渡”颜色空间;第二步将XYZ空间转换到Lab空间。若两种颜色都按L、a、b标定,则两视频帧之间的色差ΔE可用公式(11)计算[11]。

(11)
式中,明度差:
ΔL=L1-L2
(12)
色度差:
Δa=a1-a2Δb=b1-b2
(13)
对实验样本用本文方法进行处理,部分实验结果如图6所示。

图6 本文方法处理结果图
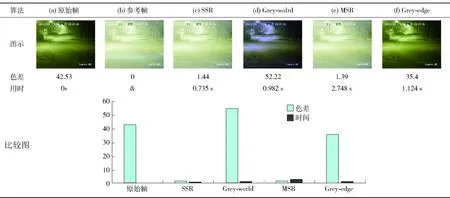
为了综合评价本文算法的颜色恒常校正效果,本文选取了Grey-world算法、多尺度Retinex(MSR)以及Grey-edge算法分别对实验样本进行偏色校正并比较其与参考帧的色差和时间效率,结果如表2所示。
2.3 结果分析
实验样本中,不同视频帧分别处于不同的光照条件下,目标物因夜晚光照不足、路灯颜色偏黄以及周围车辆灯光影响等原因而呈现出与真实情况不同的颜色。图6的(c~l)为不同视频帧经本文算法得到的校正结果图。从图6所列举的视频帧校正结果可以看出,经本文方法校正后的视频帧,亮度明显提升,目标物的颜色更接近正常拍摄视频中目标物原本颜色(蓝色),且校正后得到的视频帧保真度较高,未造成视频帧失真等情况。且从表2的数据比较图可以发现,在校正效果上,除MSR算法外,其余算法得到的角度误差均大于SSR算法,但SSR算法的时间效率优于MSR算法,实战中对时间效率要求不高时,MSR算法和SSR算法均为较优选择;在时间效率上,除White-patch算法外,SSR算法的时间效率最高。但从偏色校正的结果看,经White-patch算法校正过的视频帧亮度提升较小,偏色校正效果较差,且相对SSR算法的时间优势不明显,综合校正质量和时间效率,SSR算法最佳。
表2 不同算法比较
3 结语
随着视频侦查技术在公安领域逐渐普及,影像资料的质量对侦查工作产生了极大的影响,对视频进行正确的预处理有助于公安人员提高侦查效率,把握最佳破案时机。针对视频侦查中遇到的视频偏色问题,本文提出了一种基于SSR算法的偏色视频快速校正方法,针对公安实战中遇到的视频经过大量实验选定合理的高斯函数标准差,然后将实验所用视频解析成视频帧后逐帧输入校正,最后将校正后的视频帧重组成视频输出。该算法运行速度较快,能够实现偏色视频实时校正的目的,且较好的纠正了视频偏色现象,对后续侦查工作的顺利开展具有重要意义。但本文的方法仍然是选用单一的颜色恒常算法处理偏色视频,在面对场景不断变化的偏色视频时往往效果不佳,因此,针对不同场景信息进行颜色恒常算法的自适应选择将在下一步研究中进行。
猜你喜欢
新世纪智能(数学备考)(2021年9期)2021-11-24
中学生数理化·中考版(2021年3期)2021-07-22
新世纪智能(数学备考)(2020年9期)2021-01-04
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
国学(2020年1期)2020-06-29
家庭影院技术(2018年11期)2019-01-21
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
少儿科学周刊·儿童版(2015年11期)2015-12-17
