空间机器人执行器部分失效故障的终端滑模容错控制
2019-05-18 06:05:48雷荣华
中国机械工程 2019年8期
雷荣华 陈 力
1.福州大学机械工程及自动化学院,福州,350116 2.福建省高端装备制造协同创新中心,福州,350116
0 引言
空间机器人不仅能降低宇航员出舱活动的危险,还可以减少载人航天的费用,因此,对空间机器人的动力学与控制进行研究是当前航天领域的研究热点[1-3]。空间机器人的执行器长期重复地执行控制指令,极易发生失效故障,而执行器的失效,轻则导致系统控制精度下降,重则导致整个控制系统崩溃。由此可见,空间机器人的执行器失效是一类发生几率高且危害大的故障。值得一提的是,空间机器人由于缺少地面站的支持,一旦执行器发生故障,往往是无法维修的,因此在不对其进行外部维修而仅依靠自身容错能力来维持控制系统的可靠运行,在整个航天任务中显得至关重要[4-6]。
空间机器人的载体基座处于自由漂浮状态,机械臂关节与载体之间存在强烈的运动学与动力学耦合作用,这就导致对地面机器人行之有效的控制方法通常都难以直接推广到对空间机器人的控制当中[7-9]。近年来,空间机器人控制方法的研究在理论和实际应用中都取得了一些新成果。针对受外部扰动的空间机器人,于潇雁等[10]设计了一种无速度反馈的增广自适应算法,该算法仅需测量系统的位置信息就可以实现期望轨迹的精确跟踪控制;对于空间机器人执行器输出力矩受限的问题,梁捷等[11]提出了一种自适应抗饱和模糊神经网络控制器,实现了有限输出力矩条件下载体与机械臂关节之间的协调运动。对于参数不确定与受外部干扰的空间机器人,谢立敏等[12]提出了一种鲁棒反步控制法,保证了机械臂运动轨迹相对参考轨迹的渐进跟踪。叶柄能等[13]基于时延估计技术对参数不确定的空间机器人提出了一种鲁棒H"控制方法。但以上研究并未考虑执行器部分失效故障对系统控制性能的影响。LUCA等[14]利用高阶滑模观测器实现了对机械臂系统执行器故障的实时估计,但并未给出有效的容错控制方法以实现对关节期望轨迹的跟踪控制。对于执行器发生部分失效故障的可重构机械臂,赵博等[15]设计了一种基于神经网络的分散容错控制方法,但该方法需要测量系统的速度信号。当前,针对执行器故障的容错控制研究主要集中于地面机器人,而专门针对空间机器人的相关研究尚不多见。
本文针对执行器发生部分失效故障的空间机器人,设计了一种非奇异终端滑模分散容错控制方法。
1 空间机器人系统动力学模型
1.1 系统动力学模型
做平面运动的n连杆空间机械臂系统结构如图1所示。该系统由自由漂浮的卫星基座(载体)B0与刚性臂Bi(i=1,2,...,n)组成。其中,OXY为系统的惯性坐标系,oixiyi为各分体(载体或某刚性臂)的主轴坐标系;Oc为系统质心,Oci为各分体的质心,Oi为各分体的转动中心,且Oc0与O0重合;忽略安装在各分体上的驱动电机的质量[12],mi、Ji分别为各分体的质量和转动惯量;l0为基座转动中心O0与刚性臂B1的转动中心O1之间的距离,li为机械臂Bi的长度,di为转动中心Oi到质心Oci之间的距离;ri、rc分别为各分体质心Oci和系统质心Oc相对坐标原点O的矢径;θ0为y0轴与Y 轴之间的夹角,θi为yi-1与yi之间的夹角。载体可做平面移动与绕其转动中心O0的平面转动,机械臂Bi做绕Oi的平面转动。

图1 漂浮基n连杆空间机械臂Fig.1 A free-floating n-link space manipulator
考虑在每个分体上安装执行器(驱动电机)以控制其转动。执行器故障可分为加性故障与乘性故障,本文仅考虑乘性故障,因此将故障建模成乘积因子的形式[6]。假设此空间机械臂在运动过程中不受外部力或(和)力矩作用,则系统满足线动量守恒定理。根据拉格朗日法,可得载体位置不控、姿态受控的n连杆空间机器人的系统动力学方程为

式中,q=[θ0,θ1,…,θn]T为系统的广义坐标;D(q)∈R(n+1)×(n+1)为系统的对称、正定惯性矩阵;H(q,q·)q·为系统包含科氏力、离心力的列向量;τ为载体与关节的执行器驱动力矩组成的列向量;ρ为表示执行器的有效因子的对角矩阵。
第i个子系统执行器的有效因子满足0<ρi≤1(i=1,2,…,n+1),ρi=1表示第i个执行器正常工作,0<ρi<1表示第i个执行器发生部分失效故障但仍在工作,因此有效因子可作为执行器当前健康状态的表征。
空间机器人系统动力学方程(式(1))中的相关矩阵具有如下性质[10-11]。
性质1 矩阵D(q)为有界矩阵,即‖D(q)‖≤ξD,其中ξD为正常数,‖·‖表示标准欧氏范数。
性质2 矩阵D(q)与H(q,q·)满足斜对称关系,即yT(D·(q)-2 H(q,q·))y=0,y∈Rn+1。
1.2 子系统动力学模型
传统的集中控制方法存在控制器维数高、结构复杂、计算量大的问题,尤其是随着杆件数量(自由度)的增加,这些问题将变得更加突出。为了简化控制结构,可将各分体考虑为一个交联子系统,采用分散控制器对每个子系统进行单独控制,同时利用分散神经网络对交联项进行补偿。
从式(1)的系统动力学方程中分离出局部变量(qi,q·i,q··i),i=1,2,…,n+1,则子系统的动力学模型可以描述为[15]

式中,Di(qi)为子系统的惯性参数项;为子系统科氏力、离心力项;分别为向量τ的第i个元素;Dij(q)、Hij(q,q·)分别为矩阵D(q)、H(q,q·)的第ij 个元素;Zi()为子系统交联项。
定义子系统的状态向量xi=(xi1,xi2)T=()T,i=1,2,…,n+1,则式(2)可写成如下的状态空间方程

因此,本文的控制目标是针对载体位置不控、姿态受控的空间机器人动力学子系统(式(2)),设计一种融合有效因子的非奇异终端滑模容错控制器。利用神经网络对系统的执行器故障进行估计,并自适应地补偿神经网络逼近误差,保证控制系统的稳定性,使得空间机器人在执行器发生故障的情况下,系统输出轨迹仍然能跟踪给定期望轨迹。
2 分散滑模观测器的设计
定义qi、q·i分别为qi与q·i的观测值,令xi1=qi,xi2=q·i。设计分散滑模观测器为
式中,ki1为增益fi(qi,q·i)与gi(qi)的神经网络估计;vi(ei2,θip)为补偿交联项对系统影响的待设计项;δi用于补偿神经网络估计误差对控制精度的影响。
定义状态xij的观测误差为eij=xij-xij(j=1,2),结合式(4)与式(5)可得相应的状态误差动力学方程为

由式(4)可知,fi(qi,q·i)、gi(qi)分别为关于(qi,q·i)和qi的非线性未知函数。由于神经网络函数能以任意精度逼近紧集内的非线性光滑函数[15],故采用学习速度快 的径向基(radial basis function,RBF)神经网络,分别以(qi,q·i)与qi为输入样本,利用 RBF神经网络对fi(qi,q·i)与gi(qi)进行逼近。假设理想神经网络逼近为

式中,θif、θig分别为fi(qi,q·i)和gi(qi)的理想神经网络权值;σif、σig为神经网络基函数;εif、εig为神经网络估计误差,且εif与εig未知有界。
定义θif、θig分别为θif、θig的估计值,σif、σig分别为σif与σig的估计值,则fi(qi,q·i)与gi(qi)的RBF神经网络输出为

定义权值估计误差θ~if=θif-θif,θ~ig=θig-θig,有

采用下式所示的RBF神经网络补偿交联项hi(q ,q·,q··)对系统的影响:

式中,θip为理想权值θip的估 计值,θ~ip为 权值估计误差;σip为基函数σip的估计值,σ~ip为估计误差。
假设1 交联项hi(q,q·,q··)有界且满足

自适应参数θif,θig,θip与δi的更新律设计为
3个学段,北京版、北师版、冀教版和人教版的平行四边形内容有13个知识点,苏教版和青岛版有11个知识点.其分布详见表3.

式中,ηif、ηig、ηip、λi为自适应调节系数,且均为正常数。
定义神经网络的最小估计误差为

假设2 神经网络估计误差ωi= ωi1+ωi2有界,且满足

式中,δi为δi的理想值。
定理1 对于式(4)的故障子系统模型,在假设1与假设2成立的前提下,采用式(15)~式(18)所示的参数更新律,可保证式(5)的滑模观测器的观测误差渐进收敛至零,即当t→∞,eij→0。
证明:构造如式(22)所示的正定Lyapunov函数
从以下两个步骤来对定理1的结论进行证明。
(1)将V1对时间求导,可得


注意到ei2<ej2Ei<Ej,应用Chebyshev不等式[15],可得

3 终端滑模容错控制器的设计
为了使空间机器人在执行器发生部分失效故障情况下,系统输出轨迹仍然能够稳定地跟踪期望轨迹,本文设计了一种非奇异快速终端滑模分散容错控制律,可以有效改善系统的控制性能。
定义期望轨迹为qd=[θ0dθ1d… θnd]T,其中θid,θ·id与 θ··id(i=0,1,…,n)均为连续有界函数。状态xi1的跟踪误差为

式(27)对时间求导,可得

非奇异快速终端滑模面si设计为

式中,αi、βi为正常数;ki、li、pi、qi为正奇数,且满足1<pi/qi<2,ki/li>pi/qi。
式(29)对时间求导,并利用式(5)的第二式,可得
基于非奇异快速终端滑模的分散容错控制律设计如下:

式中,ζi与ηi为正常数。
由于1<pi/qi<2,ki/li>pi/qi,故式(31)的控制律不含任何负指数项,因此不存在计算奇异问题。
定理2 对于故障子系统模型(式(4)),设计分散滑模观测器(式(5)),应用终端滑模容错控制律(式(31)),可保证整个闭环系统渐进稳定,即当t→∞,εi→0。
证明:构造正定Lyapunov函数

式(32)对时间求导,可得
将式(31)代入式(33),可得

由此可见,当si≠0时,由于1<pi/qi<2,则0<pi/qi-1<1,考虑到βi>0,pi与qi为互质奇数,因此
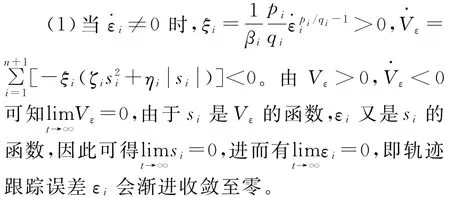
(2)当εi=0,而εi≠0时,系统处于非稳定状态,可以证明系统不会一直保持在此状态(εi=0,εi≠0),而将渐进地抵达并保持在非奇异终端滑此时轨迹跟踪误差εi也会渐进收敛至零。
综上可知,闭环系统是渐进稳定的。定理2证毕。
值得注意的是,式(31)的控制器并不含有效因子,因此该控制器不需要了解执行器故障的具体信息,适合于所有执行器部分失效故障的容错控制。自适应神经网络减弱了传统控制算法对执行器故障下确界必须是已知的约束[6],便于工程实现。
4 仿真算例
为验证本文提出的分散容错控制律的有效性,对图1所示的平面空间机械臂系统进行数值仿真,取n=2。空间机器人的惯性参数为m0=40kg,m1=m2=3kg,l0=1.5m,l1=l2=3m,d1=d2=1.5m,J0=34kg·m2,J1=J2=1kg·m2。
对于前述RBF神经网络,选取基函数为高斯函数:
式中,xif,xig与xip为高斯函数的输入变量;cif,cig与cip为高斯函数的中心;bi为高斯函数的宽度。
选择神经网络参数为:输入变量xif=心cif,cig与cip随机地分布在区间[-2.5,2.5],宽度bi=2;神经网络隐层节点数为5。
采用以上的惯性参数与神经网络参数,针对常值型与随机时变型执行器失效故障进行仿真。仿真时考虑了空间机器人工作过程中最严重的一种故障情况,即所有执行器均发生部分失效故障。
4.1 常值型失效故障
常值型故障的有效因子ρi(i=1,2,3)可描述为[5]
控制器参数选取为pi=5,qi=3,ki=7,li=3,ki1=0.16,αi=18,βi=22,ζi=45,ηi=20;自适应增益系数选取为ηif=0.000 2,ηig=0.000 2,ηip=60,λi=5;载体与关节的期望轨迹选取为θ0d=cos(0.2πt)-1,θ1d=sin(0.2πt),θ2d=cos(0.2πt);系 统 初 始 运 动 位 置 为 q (0)=[0.1 0.2 0.8]T,xi1(0)=0.5;初 始 速 度 为q·(0)=[0 0 0]T,xi2(0)=0。仿 真 结 果 见图2。
由图2可知,在故障未发生时,尽管初始阶段存在一定跟踪误差,但由于容错控制器的作用,使得载体、关节1与关节2分别在2s、6s与1s内实现对期望轨迹的稳定跟踪,直至在故障发生时,仍能保持这种良好的跟踪性能。仿真结果表明所设计的控制器对常值型执行器故障的容错有效性。
4.2 随机时变型失效故障
随机时变型故障的有效因子ρi可描述为[6]

图2 轨迹跟踪曲线(常值型故障)Fig.2 Trajectory tracking curves(constant faults)
式中,rand(1)表示为0至1之间的一个随机常数[6]。
控制器参数选取为pi=5,qi=3,ki=7,li=3,ki1=0.14,αi=25,βi=25,ζi=35,ηi=6;自适应增益系数选取为ηif=0.000 2,ηig=0.000 2,ηip=75,λi=2;载体与关节的期望轨迹选取为θ0d=sin(0.2πt),θ1d=cos(0.2πt)-1,θ2d=sin(0.2πt);系 统 初 始 运 动 位 置 为 q (0)=[-0.2 0.2 0.1]T;初 始 速 度 为 q·(0)=[0 0 0]T,xi2(0)=0。仿真结果见图3。
由图3可知,当执行器发生随机时变型失效故障时,尽管有效因子未知,但由于神经网络控制器对其具有良好的在线估计能力,能够及时消除失效故障对控制系统的影响,使得载体、关节1与关节2分别在6s、1s与3s内实现对期望轨迹的稳定跟踪。仿真结果表明所设计的控制器对于随机时变型执行器故障亦具有良好的容错能力。
5 结论

图3 轨迹跟踪曲线(随机时变型故障)Fig.3 Trajectory tracking curves(stochastic time-varying faults)
本文针对执行器发生部分失效故障的空间机器人,提出了一种基于非奇异终端滑模的容错控制方法。利用分散神经网络对系统的执行器故障进行估计,根据估计结果在线设计控制律消除执行器失效故障对系统稳定性的影响,并通过数值仿真验证了控制方法的有效性与理论分析的正确性。
本文提出的控制方法具有以下优点:非奇异快速终端滑模避免了传统线性滑模的计算奇异现象;自适应神经网络减弱了传统容错控制方法中对执行器故障下确界必须是已知的约束;利用速度观测器对系统的速度信号进行了实时观测,可以一定程度上代替速度传感器,节省了载人航天的成本。该控制方法具有潜在的工程应用前景。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
铁道通信信号(2020年3期)2020-09-21 09:13:00
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
测控技术(2018年12期)2018-11-25 09:37:50
铁道通信信号(2018年8期)2018-11-10 05:15:44
制造技术与机床(2017年9期)2017-11-27 02:13:45
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49