擂台机器人的设计与实现
2019-05-17 11:57院冬珠时富斌刘桐青
大众投资指南 2019年5期
院冬珠 时富斌 刘桐青
(山东协和学院工学院,山东 济南 250107)
为秉承“大众创业,万众创新”的发展战略,培养大学生的创新意识,理论知识应用能力,实践动手能力,提高大学生的知识创新和科技发明的能力,高校之间进行机器人比赛的项目也越来越多,也提升了学生对于科技创新的兴趣。根据机器人擂台争霸赛场地设置及机器人的尺寸,重量等要求,我们设计了名为战神号机器人,在本文中主要从控制系统设计方面以及机械结构设计方面对机器人进行阐述。
一、控制系统的设计
在该擂台机器人的设计中,主控芯片选用AT89S52单片机进行控制,该系列单片机是一种低功耗,高性功CMOS8位处理器,具有8K在系统可编程Flash存储器。在该最小系统中外围模块主要包括:光电开关,电机驱动,电源,降压模块等。
(一)电机模块
直流电机选用方面经过初期筛选,初步选择市场上容易买到的质量、价格相近的两款电机为备选电机,型号分别为:GM25-370微型直流减速电机、JGA25-340微型直流减速电机,额定转速选择范围900~1000r/mim,额定电压12v。选用较高的转速以保证充足的撞击力量,当竞技双方僵持状态下内需要考虑电机产生的转矩。经过对以上两款电机现有参数的计算,得出:型号为GM25-370微型直流减速电机在最高效率点处输出的转矩为0.225 N·m,JGA25-340微型直流减速电机在最高效率点处产生的输出为0.029 N·m,两款电机在最高效率点处输出转矩相差7.7倍。两款电机都可以满足设计机器人的动力输出要求,但是选用JGA25-340微型直流减速电机作为动力输出,此型号电机在竞技过程中极易造成堵转等问题。通过对选用车轮的匹配,以及保证我方设计的机器人在竞技过程中的优势选用型号GM25-370微型直流减速电机为机器人动力源。
(二)电机驱动模块
在电机驱动模块的选用考虑到选用电机的额定电流(3A)、启动电流(6~7.5A)、堵转电流(16 A)、电机功率(26w)等因素的影响,兼顾质量轻、体积小为选用原则,确定选用参数为DC12V、Pw=84w、单路输出7A峰值50A双路电机驱动模块。
(三)电池参数的选择
在擂台机器人设计中对电池选用影响最大的为电机,此电机的启动电流为6~7.5A,为保证四台电机的顺利启动选用的电池放电倍率需≥25C或In≥20A;保证必要的运行时间,单块电池电量存储≥1500mA,数量≥2块。电机驱动用的是12v电压,而光电开关和主控芯片上的电压时5v,所以电机驱动上的电直接在电池上取用。
(四)光电开关
在该机器人的设计中通过传感器接收过来的信息对现场环境进行判断,传感器是该机器人的感知部件,通过传输过来的各种信息,处理器进行信息处理,在该机器人设计中,底盘部位选用4个传感器,用于检测边缘线,防止跌落。在机器人的上方选用4个传感器,分别完成正向进攻及侧方位防守。
二、机械结构设计
在机械结构设计方面,在满足结构强度、韧性情况下选用轻质量材料,同时兼顾可维修性。选用材料同时考虑成本等因素因此选用Y1Cr18Ni9材料为机械结构主体加工材料。
关键结构部位主要包括了铲板设计、铲板与车体连接设计、整体稳定性设计、整体抗弯曲变形设计。
(一)铲板设计:铲板采用小角度与大角度结合,整体镂空设计。铲板下部为与水平面10度倾角设计,保证对抗过程中尽可能铲入对方底盘或其他结构下方;后半部分采用与水平面45度倾角设计,尽可能减小铲板长度;整体镂空减轻铲板重量。
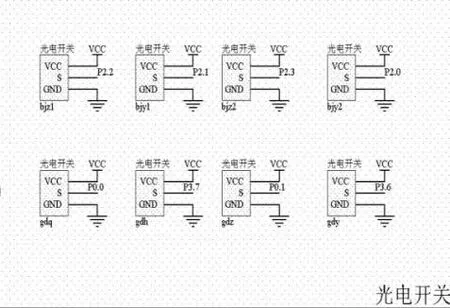
图1 光电开关电路图

图2 光电开关
(二)铲板与车体连接设计:铲板与车体采用连杆结构,设计为机械自锁结构,保证变形后因外力将铲板向上掀起高度≤1cm;留有小部分浮动余量保证顺利通过部分不平整擂台表面。铲板变形后,连杆结构成三角形,保证变形后的整体稳定性。
(三)车体稳定性设计:机器人整体为双铲板对称结构,重心设计在变形后前后铲板对角线相交处,整体重量集中在车体下半部分,保证车辆运行过程中的稳定性。静止状态下将车体倾覆的转矩需>6.615N·m;正面对抗状态下;车体以1.5m/s速度状态下运行车体产生的力大约为22.05N·m,因铲板结构设计,力的方向将由水平向前转换为与水平面夹角10度向下方向的力,产生垂直于水平方向的分力约为22.39N/m,水平方向的分力约为126.98N/m。如不考虑摩擦阻力等其他因素影响,对抗过程中对手的速度将我方车体倾覆的速度需>1.5m/s。
(四)整体抗弯曲变形设计:不锈钢具有良好综合性能,但因选择板材长厚比大,同时为减轻重量时采用整体镂空设计,极易产生弯曲变形,作为机器人的骨架部分,需要有良好的抗弯曲变形能力。

图3 机械结构设计图
在车轮选用方面我们选用直径为72mm的硅胶驼峰一体轮为设计机器人的车轮。
猜你喜欢
测控技术(2021年10期)2021-12-21
商品与质量(2020年33期)2020-11-07
通信电源技术(2018年3期)2018-06-26
电子测试(2017年11期)2017-12-15
电力系统及其自动化学报(2016年5期)2016-12-01
国防制造技术(2016年2期)2016-03-12
电源技术(2015年11期)2015-08-22
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
电测与仪表(2015年10期)2015-04-09