
船员实操考试评价体系标准化研究
2019-05-17 07:42贾东星陈锦标
现代计算机 2019年10期
贾东星,陈锦标
(上海海事大学商船学院,上海 201306)
0 引言
到2017 年底,我国注册的船员总数已达148.3 万余人,船员总数居世界第一位[1]。为了应对航运市场的低迷,船员培训机构开展了大量的面向船员技能提升的培训,积累了丰富的教学实践经验[2-3],调查发现我国船员综合素质距离发达国家仍存在一定的差距[4-5]。
目前,我国的航海基础教育主要是由航海院校来完成,而相关的船员职务培训工作则是由航海院校和船员培训机构完成。在开展船员实际操作能力培训中,大量地采用了真机设备与模拟器设备相结合的教育培训方式,要求理论教学和实船教学保持一致性。在任课教员将航海理论教学和实际经验联系的过程中,接受培训的船员能够不自觉地将实践操作提升到理论水平的高度。同时,电子航海理论的快速发展也极大地丰富着航海教学的内容和培训形式,促进着航海教育模式、评估方法及观念的变革。
1 标准化评价体系的必要性
现行的船舶操纵实操评估中,受训学员完成实操过程后,评估员根据学员的整体表现给出相应的评估成绩。评估员一般是由在船上任职多年的教师构成,其理论认知水平、航海实践经验及对评估标准的理解直接影响着学员的成绩,使得评估具有一定的随意性[6]。受限于评估教练员人数,这种评估方式只能在一定的范围内进行,无法大面积推广开展,不能很好地满足航海教育快速发展的要求,不能完全符合国际国内船务公司对船员培训过程中提高实际操作能力的要求。因此,有必要完善船员评估流程,建立一套标准的船员评价体系,以适应船员市场的快速发展。同时,信息技术的快速发展使得今后的考试朝着自动化评估的发展方向改革,标准化的船员评价体系可以为将来船员智能化评估的开展提供基础。
2 船员实操考试评价模型
2.1 船舶实操评估场景过程描述
依据交通运输部2017 年实施生效的《中华人民共和国海船船员适任考试和发证规则》,驾驶类船舶实操评估场景考查的知识点涉及船舶操纵、避碰与驾驶台资源管理三个方面,每个方面又包括若干评估内容。如图1 所示船舶从锚地起锚到靠泊的过程,学员在实际的操作中,评估员会从船舶操纵、避碰与驾驶台资源管理三个方面进行考察。经过分析发现,该过程可进一步细化为起锚、航行、靠泊三个子过程。由于评估侧重点的不同,每个子过程又可以进一步细化为若干过程,如航行子过程可以进一步划分为能见度不良航行、应急操作、通信操作等过程。如图2 所示,以船位或时间为横坐标,以船舶所处的过程为纵坐标后简化的操作情景图。其中,量化描述是每个过程划分的处理手段,采取合适的量化标准可以将子过程控制在合理的范围。

图1 锚地起锚航行靠泊过程
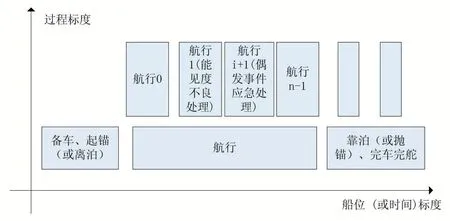
图2 场景模型化
2.2 船员实操评估模型建立
在船舶航行中,“人-船-环境-管理”是一个有机系统[7],培训者操纵水平的高低直接影响着船舶的安全运行,而环境和船舶的操纵性能对培训者操船能力的影响同样也是极为重要的[8]。对培训者进行操纵能力的评价,需要从训练者水平、船舶操纵性及航道环境等多个方面考虑,建立一个综合性的评价模型来完成航道水域船舶操纵性评价。因此,划分后的每个子过程需要采取合适的评价影响因素和评判模型。对操纵者在每个子过程中的操纵行为得出评估结果,按照不同的权重汇总多个子过程的评估结果便可以得到整个过程的评估结果。如图3 所示评估流程图,在根据船位(或时间)划分后的子过程中,判定评估对象是否适任该子过程能力要求,决定评估对象是否有必要继续下一子过程的评估。
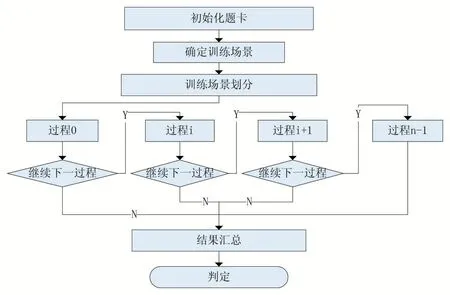
图3 评估流程图
确定评价的指标体系是进行船员子过程场景实操评估的基础[9]。考虑到需要衔接多年来实操评估过程中的主观性因素,可采用专家调查法收集评估影响因素进而确定评价指标体系。在和船员培训工作一线的具有多年评估经验的多位教练员和评估员沟通的过程中,通过问卷调查的形式来获取评价影响因素,利用层次分析法的分析过程对多位专家的意见进行处理得出评价指标权重。考虑到现阶段模糊综合评价法在船员评估中的广泛应用,选取模糊综合评价法作为评价模型。如图4 所示在处理子过程i 的评估时,需要先确定指标体系及指标权重,之后利用评价方法得出子过程i的评价结果。

图4 子过程i评估
2.3 船员实操评估自动化接口
评估流程与标准化评估体系的建立可以方便船员评估工作的开展。目前,航海模拟器在航海教学中得到了广泛的应用,利用模拟器研发自动评估系统进而对受训船员的操船能力进行客观评价是一种必然的发展趋势[10-11]。本文所做的评价体系标准化研究可作为后续船员自动化评估的基础。如图4 所示评估模型与航海模拟器的结合方式,航海模拟器设置完成训练场景后,需要对主本船的操作进行子过程划分,根据子过程的操作行为调用评估模型完成子过程评估。

图5 航海模拟器与自动化评估的结合模型
3 案例:船舶狭水道靠泊操作
在将整个船舶狭水道航行过程划分为起锚、航行、靠泊三个子过程的基础上,考虑到各子过程计算的相似性,以靠泊操作子过程为例进行分析。说明靠泊操作如何进行进一步的过程划分,如何获取划分后子过程的评价影响因素,如何建立评价模型,得出评价结果。
3.1 靠泊操作过程分析
船舶航行到距泊位合适的距离后就进入了靠泊操作过程,船舶驾驶员需要控制船舶的速度与航向,可能需要借助拖船完成靠泊操作或自我靠泊操作[12]。如图5 所示船舶靠泊轨迹简化图。根据是否借助拖船完成靠泊,可将船舶靠泊操作过程分为A 操作过程和A1操作过程,或A 操作过程和A2 操作过程;其中,操作过程A 主要是船舶进入抵泊区前的一段操作,在该过程船舶驾驶员需要使用车舵控制船舶的速度与航向,操作过程A2 或A1 是船舶驾驶员借助拖船操纵或仅自船操纵控制船位到合适的位置,最终完成靠泊。
3.2 靠泊操作评价指标体系
以船舶不借助拖船自船操纵完成靠泊为例,评价操作过程A 的因素包括抵达泊区位置的速度(惯性余速)以及此时的船首向与码头岸线间的角度θ,在操作的过程中船舶操纵的安全性(航迹偏移情况、速度控制情况等)以及车舵运用的熟练性等。评价操作过程A1 的因素主要考虑抵泊余速、抵泊横距d、抵泊角度ψ、靠拢角度α、靠拢速度、靠泊角度的选取、车舵运用的准确性与连续性等因素。完成靠泊后,主要从靠泊完成后与前后泊位/船舶的安全距离、靠泊位置准确性、总耗时、靠泊过程中航迹的总体平滑性、靠泊结果安全性(是否对码头泊位造成损害、是否对船体造成损害等)等因素方面考虑靠泊结果。如表1 所示靠泊操作的影响因素。
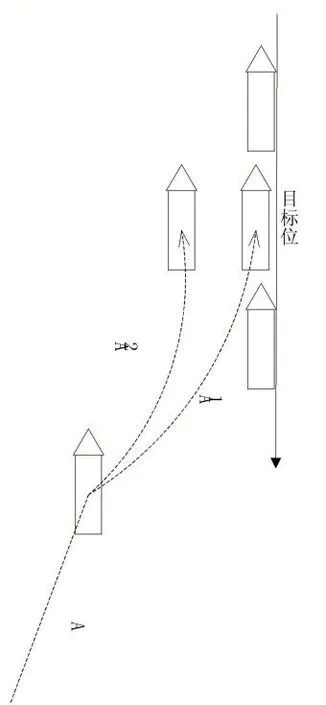
图6 船舶靠泊轨迹图

表1 靠泊操作
利用现行的经验确定好船舶不借助拖船完成自我靠泊的评价指标体系后,可利用专家调查法对其进行修正同时确定指标权重,从而可以构建权重矩阵A。
3.3 靠泊操作评价方法
由于评价影响因素中主观因素和客观因素的不同,客观因素通过采集航行操纵数据直接获得,主观因素需要评估员根据多年培训的经验与考评大纲的理解给出相应的评估值,对各主、客观因素进行评价得出评判矩阵R。利用式(1)进行模糊综合评判处理得到模糊综合评判结果向量B[13]。

直接利用最大隶属度原则处理评判结果向量B=(b1,b2,…,bm)从而得出最终的评估值。
4 结语
船员教育培训作为航运人才资源的基石,在整个航运市场中发挥着举足轻重的作用。成功地通过船员适任能力评估是船员职位晋升的必经途径,影响着船员培训教育机构乃至整个船员市场的发展[14]。为了评估标准的一致性,海事主管船员培训机关及船员培训机构每年都多次开展交流合作,旨在促使评估流程的完善及评估体系的规范。本文提出的规范化评估流程的思路及标准化评估指标体系的步骤,可作为一种驾驶类船员培训教育的模式,也可作为一种发展船员适任能力自动化评估的借鉴。
猜你喜欢
中国德育(2022年18期)2022-10-14
凤凰动漫(军事大王)(2022年5期)2022-08-22
汽车实用技术(2022年5期)2022-04-02
活力(2021年4期)2021-07-28
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
故事作文·高年级(2021年4期)2021-05-06
故事作文·高年级(2020年9期)2020-09-16
早期教育(美术教育)(2019年11期)2019-12-25
科教导刊·电子版(2018年8期)2018-06-22
作文大王·低年级(2017年10期)2017-10-28
