
核磁共振陀螺仪中三维磁场的初步锁定
2019-05-16 09:21:40徐正一彭欣欣李连花周尹敏裘栩炀徐信业
导航定位与授时 2019年3期
徐正一,彭欣欣,李连花,周尹敏,裘栩炀,周 敏,徐信业
(华东师范大学精密光谱科学与技术国家重点实验室,上海 200062)
0 引言
核磁共振陀螺仪因其兼具小型化与高精度的特点,可以在一些特殊应用中替代较为昂贵的转子陀螺。核磁共振陀螺仪中没有运动部件,对于振动和过载都不敏感,拥有低功耗和低成本的巨大潜力,并正在向芯片级尺寸和战略级精度发展,目前已成为国内外研究的热点领域,且未来有望应用于航空航天以及国防战略领域,同时在民用领域也具有广泛的应用前景。近年来,北京自动化控制设备研究所[1-2]和国防科技大学[3-6]等单位也开始了核磁共振陀螺仪的理论和实验研究。
核磁共振陀螺仪选用极化后的原子核自旋在外磁场中的拉莫尔进动作为转动参考系,因此纵向磁场的不稳定会造成拉莫尔进动频率的变化;而在整个陀螺仪旋转时,由于缓冲气体的黏滞性,其中的气体可能并不跟随陀螺仪同步转动,这种情况可能会使陀螺仪的动态范围受限。为了尽可能减少上述问题带来的影响,核磁共振陀螺仪需要设计磁屏蔽系统和磁场补偿系统以消除外部磁场干扰并维持内部磁场的均匀性。
三维磁场锁定的关键是三维原子磁力计的实现。传统的基于非线性旋光效应的原子磁力计将信号对其他方向上磁场的响应视作干扰,因此只能实现一个方向上磁场的探测,而通过对不同方向上的磁场以不同的频率分别进行调制,就可以在传统原子磁力计的基础上实现三维磁场探测。通过调制x和z方向磁场,在无外磁场屏蔽的情况下,可实现灵敏度达到1pT·Hz-1/2量级的三维原子磁力计[7];使用双方向泵浦光频率调制的方案,磁力计灵敏度可达到65fT·Hz-1/2[8]。基于两类不同的原子磁力计实现的三维磁力计,可实现x和y方向300fT·Hz-1/2的灵敏度,z方向3pT·Hz-1/2的灵敏度[9]。
考虑到核磁共振陀螺仪小型化的发展方向,选用两类不同的原子磁力计实现现有系统中三维磁场的同时测量。下面首先介绍核磁共振陀螺仪的基本原理以及三维磁场锁定的基本原理,分析三维磁力计误差信号并给出目前初步实现的三维磁场锁定情况,最后对现阶段实验的优化方向进行分析和讨论。
1 基本原理
1.1 核磁共振陀螺仪的基本原理
原子核自旋在外加静磁场中会进行拉莫尔进动。如果对原子施加一定频率的电磁辐射,且其频率接近原子核自旋的拉莫尔进动频率时,原子核自旋会吸收电磁辐射的能量,产生核磁共振现象。这类利用核磁共振过程中的拉莫尔进动作为转动参考系实现的陀螺仪即核磁共振陀螺仪,其工作原理如图1所示。
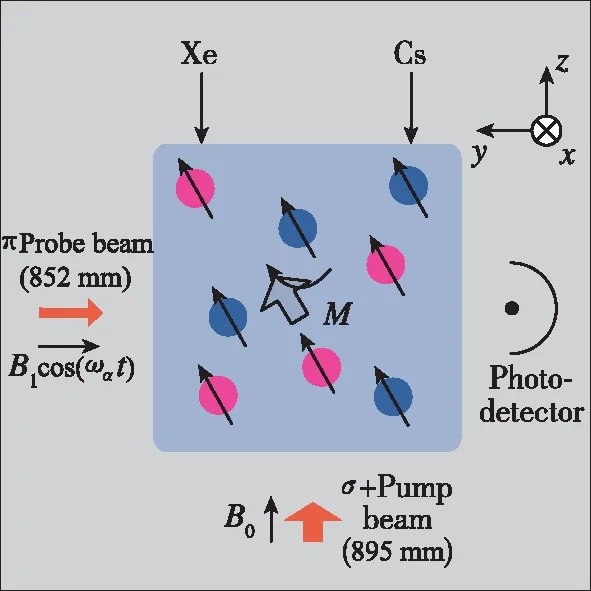
图1 核磁共振陀螺仪的工作原理Fig.1 Operation principle of the nuclearmagnetic resonance gyroscope
核磁共振陀螺仪的基本原理主要包括光泵浦超极化和高灵敏原子磁力计,工作原子一般选用碱金属原子和惰性气体原子。首先通过施加同向传播的圆偏振泵浦光和纵向静磁场B0以极化碱金属原子,然后通过碱金属原子与惰性气体原子之间的自旋交换碰撞过程实现惰性气体原子的极化。在垂直于泵浦光传播方向上施加激励磁场B1后,惰性气体原子极化形成的宏观磁矩进行拉莫尔进动,如果惰性气体原子的旋磁比为γn,则拉莫尔进动频率ωL=γnB0。此时在垂直于泵浦光传播方向上施加探测光后,基于非线性旋光效应可以实现高灵敏原子磁力计,用于探测惰性气体原子极化形成的宏观磁矩。当陀螺仪以角速度ωR绕泵浦光方向旋转,则探测到的宏观磁矩进动角速度ωM=ωL+ωR。故陀螺仪的角速度ωR=ωM-ωL,从而实现了陀螺仪对角速度的测量。可见磁场的稳定性对于核磁共振陀螺仪的性能至关重要,实现三维剩磁的补偿有利于提高核磁共振陀螺仪的性能。
1.2 三维磁场锁定的基本原理
如图1所示,碱金属原子形成的宏观磁矩M可以通过布洛赫方程进行描述
(1)
其中,M0为未进动时宏观磁矩的大小,γe为碱金属原子的旋磁比,T1和T2分别为碱金属原子的纵向和横向弛豫时间。如果令M+=Mx+iMy,B+=Bx+iBy,则关于M+的布洛赫方程可以写为
(2)
当B0被调制后,即Bz=B0+Bmcos(ωmt),ωm和Bm分别为静磁场B0的调制频率和幅度,则上述布洛赫方程的解可以写为[10-11]
(3)
其中,km=γeBm/ωm。当满足|Bx|<<1/γeT2,|By|<<1/γeT2和|Bz-nωm/γe|<<1/γeT2时,可进一步给出δMx和δMy
δMx=γeMzT2Jn(km)×
δMy=γeMzT2Jn(km)×
(4)
由于km与Bm和B0的比值成正比,故通过改变Bm和B0的比值可以改变δMx和δMy的大小。选取n=1可得
(5)
以ωm作为本征频率,对于y方向上探测到的磁力计信号,如果选用1倍或者2倍频解调,即p=1或p=2,则通过锁相放大器解调得到的X和Y通道的信号SX1和SY1或SX2和SY2分别为

(6)
以ωm的调制频率调制B0后,使用锁相放大器对原子磁力计探测到的信号进行解调,通过调节移相器的相位可以分别获得平行和垂直于探测光方向上剩磁。而在不同的Bm/B0下,应该选用不同的p来优化锁相放大器输出的Bx和By的误差信号。当Bm/B0≈1.733时,Bx和By的误差信号分别选用1倍频和2倍频解调能够获得较为理想的误差信号,此时2个误差信号的幅值较大且大小相仿;当Bm/B0<0.5时,Bx和By的误差信号都选用1倍频解调能够获得大小相仿的信号,但信号相对较小。
实现Bz的锁定需要借助于两种惰性气体同位素。如果它们的旋磁比分别为γ1和γ2,原子磁力计探测到的拉莫尔进动频率分别为ωM1和ωM2,则根据核磁共振陀螺仪的原理,可以得到
(7)
其中,ωR为陀螺仪装置转动的角速度。故可以获得Bz的误差信号Sz为
(8)
故通过测量两种惰性气体同位素的拉莫尔进动频差,其与参考频率的频率差即可用于Bz的锁定。
2 实验数据及分析
实验装置如图2所示,实验中选用充有133CS原子饱和蒸气、5torr129Xe、45torr131Xe以及200torr N2的1 cm3立方体气室,并将其加热至110℃。气室放置于屏蔽因子达106的五层磁屏蔽筒内,屏蔽筒内通过三维线圈施加磁场。在z方向上施加的静磁场为10μT,调制幅度和调制频率分别为3.3μT和35kHz,在x方向上施加一个微弱的激励磁场,驱动频率为约118.6Hz,对应129Xe在10μT下的拉莫尔进动频率。使用自制的激光器提供120mW的895nm圆偏振泵浦光以及500μW的852nm线偏振探测光,泵浦光与探测光的传播方向分别沿+z和-y方向。对探测光的偏振检测通过沃拉斯顿棱镜和双平衡探测器实现。

图2 实验装置示意图(HP为半波片,QP为四分之一波片,GP为格兰棱镜,WP为沃拉斯顿棱镜,CS为恒流电源,LIA为锁相放大器)Fig.2 Experimental setup( HP: half-wave plate, QP: quarter-wave plate, GP: Glan-Talyer prism, WP: Wollastonprism, CS: current source, LIA: lock-in amplifier)
双平衡探测器的信号分成3路送至3台独立的锁相放大器解调,分别获得3个方向磁场的误差信号。其中,LIA1和LIA2均以35kHz作为本征频率,LIA3以118.6Hz作为本征频率。因为实验中所使用的Bm/B0=0.17,因此3台锁相放大器均输出1倍频解调信号以获得x和y方向上较为均衡的信号。通过优化LIA1和LIA2的相位,可以获得x和y方向上磁力计信号对Bx和By的响应曲线,如图3和图4所示。当|δBx|和|δBy|均不大于1μT时,x和y方向上的磁力计信号不同时对Bx和By响应,故可用于分辨剩磁的产生方向。
当陀螺仪静止时,有ωR=0,故δBz=δωM/γe。通过LIA3可给出Bz的响应曲线,当|δBz|不大于15nT时,LIA3的输出信号可用于Bz的锁定,如图5所示。
图6中对比了锁定前后的三维磁力计信号。可以发现三维磁场锁定后,Bx、By和Bz在约5000s内的起伏范围分别不大于6.75nT、5.33nT和6.68nT;而锁定前Bx、By和Bz在约4000s内的起伏范围分别约15.05nT、39.78nT和16.20nT。
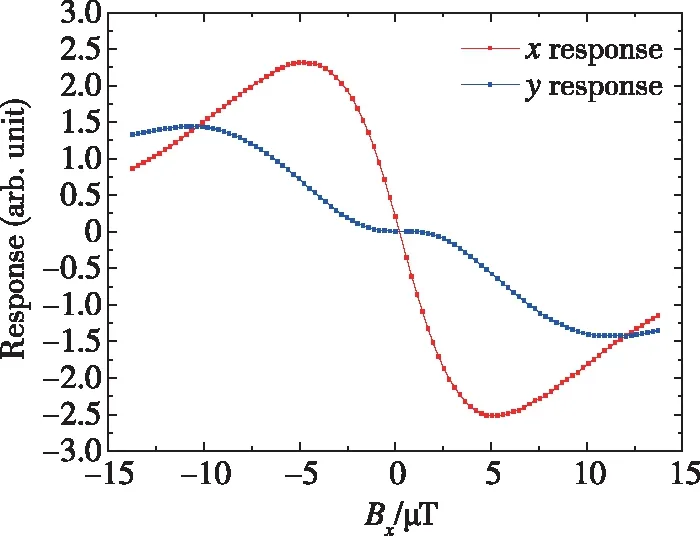
图3 110℃的气室温度下,x和y方向磁力计对Bx的响应曲线Fig.3 Magnetometer responses in thexandyaxes toBxat the cell temperature of 110℃
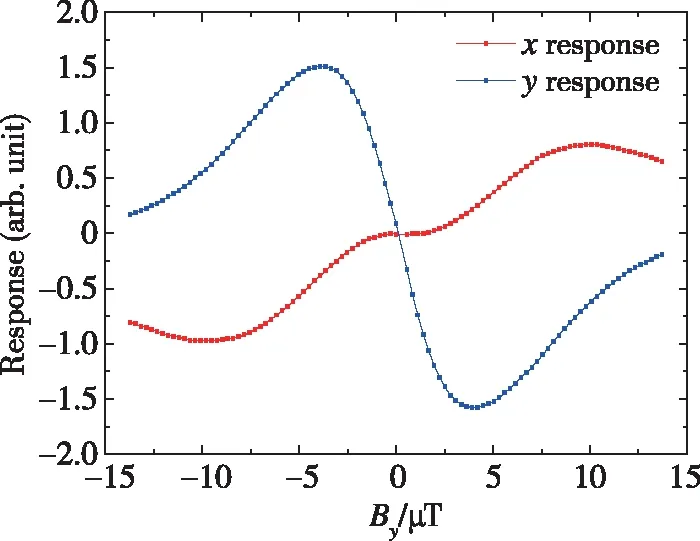
图4 110℃的气室温度下,x和y方向磁力计对By的响应曲线Fig.4 Magnetometer responses in thexandyaxes toByat the cell temperature of 110℃
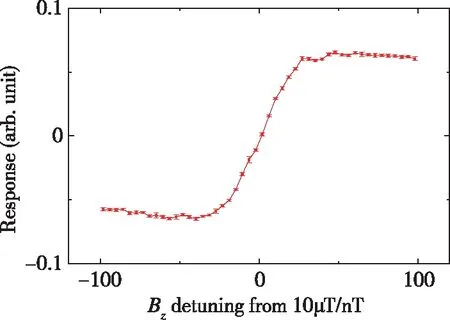
图5 110℃的气室温度下,z方向上磁力计对Bz的响应曲线Fig.5 Magnetometer response in thezaxes toBzat the cell temperature of 110℃
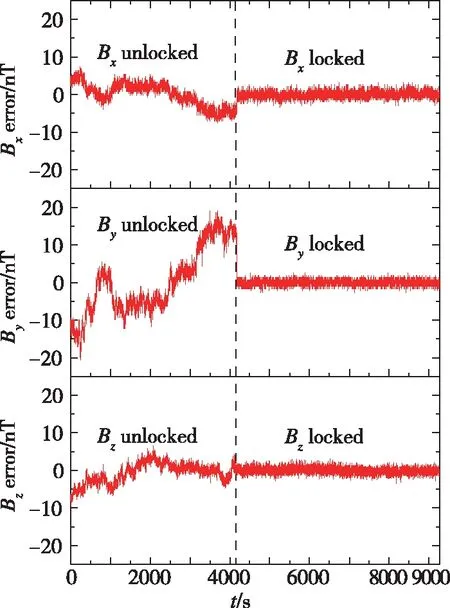
图6 110℃的气室温度下,磁场未锁定和锁定时Bx、By和Bz的误差信号Fig.6 Bx,ByandBzerror signals when the magneticfield is locked and unlocked at the cell temperature of 110℃
如图7、 图8和图9所示,计算磁场锁定前后Bx、By和Bz的误差信号对应的阿伦方差后可见,磁场锁定后3个方向上的磁场长期稳定性都得到了显著提升,千秒稳均提升至少1个量级,但秒稳在锁定前后没有显著变化,这主要受限于驱动三维线圈的电流噪声。

图7 110℃的气室温度下,磁场锁定与未锁定时Bx误差信号的阿伦方差Fig.7 Allan deviation of theBxerror signal when the magneticfield is locked and unlocked at the cell temperature of 110℃
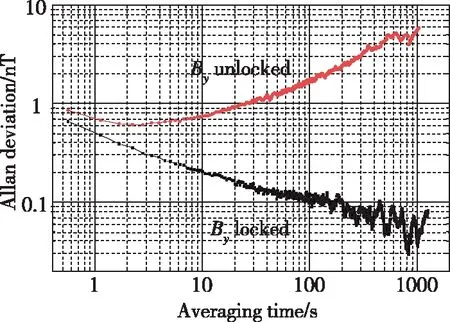
图8 110℃的气室温度下,磁场锁定与未锁定时By误差信号的阿伦方差Fig.8 Allan deviation of theByerror signal when the magneticfield is locked and unlocked at the cell temperature of 110℃
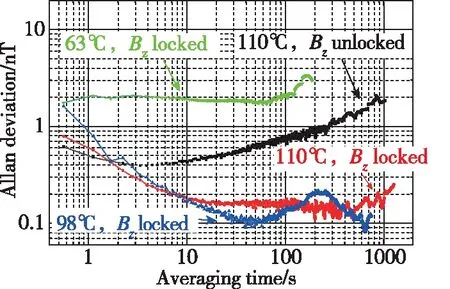
图9 不同气室温度下磁场锁定与未锁定时Bz误差信号的阿伦方差Fig.9 Allan deviation of theBzerror signals when the magneticfield is locked and unlocked at various cell temperatures
实验过程中可以观察到气室温度的选择对于三维磁场锁定具有较大的影响。相比110℃和98℃,63℃下Bz的响应曲线信噪比相对较差,而Bx和By的响应曲线信噪比并没有较大的变化。这是因为在较低的气室温度下,CS原子与Xe原子的自旋交换碰撞弛豫较小,造成Xe极化率较小,从而影响测量Bz的磁力计信噪比。由于泵浦光功率较大,因此碱金属原子的泵浦速率足够大,不同气室温度下碱金属原子都能保持相对较高的极化率,故对Bx和By的磁力计误差信号影响较小。
图9中给出了不同气室温度下z方向磁场锁定后磁力计误差信号的阿伦方差,可见63℃的气室温度下Bz锁定后在秒稳和千秒稳均不及98℃以及110℃,而110℃下z方向磁场秒稳更优于98℃,千秒稳则两者较为接近。这是由于当泵浦速率足够时,较高的气室温度下有着更高的碱金属原子数密度以及更为剧烈的自旋交换碰撞,因此测量Bz的磁力计有着更好的信噪比,磁场锁定的效果也越好。
在不同的气室温度下,Bz的主要噪声类型为磁场的白噪声,其受限于系统内的磁场本底噪声。在较高的气室温度下,磁场本底噪声更小,因而更有利于磁场的锁定。根据实验经验,在较低的气室温度下,用于Bz锁定的伺服系统参数也更难整定,调节不当会造成Bz锁定后出现正弦噪声。
3 结论
本文实现了三维磁场的初步锁定,验证了基于纵向磁场调制的三维磁力计的可行性,并对磁场锁定的性能进行了测量。通过调制z方向磁场的方式实现了单探测光束对x和y方向剩磁的测量,通过检测惰性气体原子的拉莫尔进动频率实现了对z方向剩磁的测量,从而实现了三维原子磁力计以及三维磁场的初步锁定,锁定后x、y和z方向上的磁场起伏不大于6.75nT、5.33nT和6.68nT。
本文探究了气室温度对三维磁场锁定效果的影响。通过观察不同气室温度对z方向磁场锁定效果的影响,可以认为在泵浦速率足够且气室本身造成的退极化弛豫较小的情况下,较高的气室温度有利于z方向磁场锁定。根据不同气室温度下z方向磁场锁定后磁力计误差信号的阿伦方差,可以认为在更高的气室温度下具有更小的磁场本底噪声,因此更加有利于磁场的锁定。
猜你喜欢
中国设备工程(2021年24期)2021-12-31 02:37:48
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
传感技术学报(2021年12期)2021-03-13 07:17:52
仪表技术与传感器(2021年1期)2021-02-25 11:52:36
中国科技纵横(2019年8期)2019-06-19 01:07:24
汽车零部件(2019年5期)2019-06-13 06:25:50
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
广西电力(2016年5期)2016-07-10 09:16:44
