近地小行星采矿与防御计划发展现状
2019-05-14 02:51:42邱成波孙煜坤王亚敏蒋峻陈昕
深空探测学报 2019年1期
邱成波,孙煜坤,王亚敏,蒋峻,陈昕
(1.中国科学院微小卫星创新研究院,上海 200120;2.中国科学院微小卫星重点实验室,上海 201210)
1 近地小行星探测概况
小行星是太阳系形成早期的残留物质,广泛存在于火星–木星轨道之间、近地及木星L4和L5点。近地小行星由于距离地球近,探测成本相对较低,有利于行星科学和空间资源利用探测任务的实施,同时,近地小行星也存在撞击地球的风险。因此,小行星探测近年来受到了各航天机构的广泛关注。到目前为止,天文学家已发现了1.2万多颗近地小行星,且此数字每年以上千颗的速度在上升,这些近地小行星几乎全都含有水,其中不少还有镍、铂、金等贵重金属,空间资源十分丰富[1]。美国国家航空航天局(National Aeronautics and Space Administration,NASA)、欧洲空间局(European Space Agency,ESA)、日本宇宙航空研究开发机构(Japan Aerospace Exploration Agency,JAXA)等航天机构已经完成了小行星交会、着陆、采样和返回等技术积累,正在规划行星防御和行星采样与采矿任务。特别值得关注的是,美国和卢森堡政府批准民间自行开展小行星采矿,行星资源公司(Planetary Rescource[2],PR)和深空工业公司(Deep Space Insdustry,DSI[3])两家公司均规划了小行星采矿蓝图,制定了分步走战略,已经开始了小行星特征识别的空间在轨试验。
美、日、欧洲很早便开展了深空探测小行星任务,NEAR(Near Earth Asteroid RendezvoHs)探测器最终在设计任务之外完成了在“爱神”小行星上的软着陆,获得了宝贵的探测资料和成果。日本的小行星探测器“隼鸟–1号”(Hayabusa-1)携带有一个小行星探测机器人Minerva,原计划在“隼鸟–1号”运行至行星表面20 m时投放至行星表面,但最终探测器投放失败,并未达成预期目标,不过“隼鸟–1号”还是实现了小行星表面的接触工作。“罗塞塔号”彗星探测器于2004年3月2日发射,2014年11月13日,由“罗塞塔号”彗星探测器释放的“菲莱”探测器成功登陆67P/Churyumov-Gerasimenko彗星。
到目前为止,NASA、ESA、JAXA通过一系列的小行星飞越、交会、绕飞与采样返回探测任务的实施,深空探测技术已经趋于成熟。近几年,NASA和ESA的深空探测计划不再局限于空间探测和行星表面取样,而是倾向于行星防御及近地小行星资源利用的研究。NASA、ESA和JAXA均已经启动了继小行星探测和行星表面样本提取任务之后的进展性任务,OSIRISRex(Origins Spectral Interpretation Resource Identification Security Regolith Explorer)预计在2022年左右将小行星Bennu上的样品带回地球,日本JAXA的“隼鸟–2号”(Hayabusa-2)也已开展了近地小行星采样与地表下样本分析的任务,NASA和两家新成立的民间公司已经启动了行星防御及行星资源利用的计划。
行星防御和小行星采矿已经成为小行星探测的两大热点问题,对其进一步研究有助于解决行星资源利用、地球安全保护、地外殖民计划、行星科学等一系列问题,具有重大的研究意义。
2 近期近地小行星计划
美国和日本目前正在实施的小行星计划分别为OSIRIS-Rex和“隼鸟–2号”,目标均为采样返回。美国作为小行星领域研究大国,其近期近地小行星计划的主要推动者为NASA和商业航天公司。商业航天公司PR和DSI的远景规划更突显小行星探测所带来的经济价值,通过低成本的前期小行星矿产勘探,对具有较高经济价值的小行星开展采集计划。NASA提出了ARM(Asteroid Redirect Mission),计划将直径为几米量级的小行星抓捕并实施轨道重定向进入月球逆行轨道,然后由航天员开展采样任务并将样品带回地球。
2.1 OSIRIS-Rex采样返回计划
2011年5月,OR被选中成为第3个新边境计划,耗资上限为8.5亿美金。参与单位为洛克希德·马丁空间系统公司(Lockheed Martin Space System Company)和NASA的戈达德太空飞行中心(NASA Goddard Spaceflight Center)。2016年9月使用AtlasV411火箭将OSIRIS-Rex发射升空[4-5]。
该任务从50万颗小行星中筛选出能够满足当前火箭能力内速度增量的小行星。以其轨道特性能够满足在计划时间内采样返回为筛选条件,筛选后剩下350颗。寻找直径大于200 m,避免自旋过快而无法着陆接触采样的小行星,余下29颗,其中C类小行星只有5颗,Bennu就在其中。在筛选完成之后,NASA在1999—2000年和2005—2006年利用地面观测手段进行了两次地面观测,获取了Bennu的7 m分辨率的图片,并得到大致的密度和轨道特性[6-7]。
OSIRIS-Rex的任务目标主要包括以下5部分:
1)表征原始碳基小行星的综合属性,并与地面观测数据进行比对分析。
2)对全球性质、化学成分和含碳矿物学的分布进行测绘,探索原始的小行星的特征地质和动态的演变,并提供返回的样品。
3)记录小行星质地、形态、生物化学,将采样点的风化层的光谱特性提高到厘米量级。
4)返回并分析足够质量原始碳基小行星风化层的样品,用以研究小行星自然、历史,以及它的构成物质和有机材料的分布。
5)测量有潜在危险的小行星亚尔科夫斯基效应。
OSIRIS-Rex已于2018年底抵达Bennu小行星,后于2019年1月成功进入Bennu轨道。其上的载荷有OCAMS相机套装、OVIRS可见光/红外光谱仪、OTES热辐射光谱仪、OLA激光雷达扫描、DEXIS X射线成像光谱仪和无线电科学观测仪器。任务初期,探测器对Bennu进行绕飞,OSIRIS-Rex探测器内部的激光雷达扫描仪(OLA)已初步完成扫描Bennu表面,扫描得到的Bennu小行星3D激光影像已在NASA官网公布。同时,使用中端视场成像仪MapCam观测小行星的尘埃羽状物,将光度和光谱数据与地球观测值作对比,其结果将决定如何规划安全逼近策略。在逼近后期阶段,获取Bennu具体图像,用以建立Bennu形状模型,刻画Bennu综合全局属性[8-9]。随着不断的逼近,相继获得Bennu的全局特性参数、重力场分布、小行星内部结构信息,在1 km轨道上预计获取5 cm精度图像、具体雷达观测、X光探测和热学探测地表最高温度,优选出2个基本采样点和2个备用采样点[10]。
OSIRIS-Rex采用接触式采样,采样装置为TAGSAM采样机构,如图1所示。逼近任务结束后,航天器缓慢下降,先从1 km轨道下降到距离表面125 m处待命,然后在55 m处匹配上Bennu自旋和表面指向,主要采用视觉导航引导采样机构贴近采样点[11]。在采样过程中,使用高压氮气吹动表层风化层采样,通过预设机构将表面风化层从两侧吹入收集装置内部。OSIRIS-Rex在实际采样前会进行两次预演,预演成功后才进行真正的采样任务,以提高采样成功的概率。采样结束后,OSIRIS-Rex离开小行星表面,回到安全轨道,将TAGSAM中的样品放入样品返回装置,用特制相机确认其已经摆放稳妥后,将在2021年3月离开Bennu返航[12]。

图1 TAGSAM采样机构示意图Fig.1 Illustration of TAGSAM sampling
2.2 “隼鸟–2号”采样返回任务
“隼鸟–2号”是日本第2个小行星采样返回任务,目标小行星为1999 JU3。小行星 1999 JU3的自转周期为7.6 h,直径为0.922 ± 0.048 km,外形比例为1.3∶1.1∶1.0,几何反照率为0.063 ± 0.006,星等为18.82 ±0.021,倾斜参数为0.110 ± 0.007,近日点/远日点为0.85/1.4 AU,光谱类型为Cg。“隼鸟–2号”提供至多2 km/s的速度增量。“隼鸟–2号”总重为600 kg,比“隼鸟–1号”重了90 kg,90 kg中一半用在提升各模块的冗余量,一半提升科学能力。“隼鸟–2号”自带2个大视场相机和1个望远相机以实现视觉导航。
“隼鸟–2号”上载有MASCOT着陆器及3个跳动探测器,MASCOT是由德国宇航局制造的重量为10 kg的着陆器,称为“行星表面跳动侦察机”,它是300 mm ×300 mm×200 mm的盒状结构,用于行星表面探测及科学研究。MASCOT着陆器已于2018年10月4日成功投放到目标小行星表面。的大致结构如图2所示,它由上盖、铝架外框、捆绑电源、无线电收发单元、光口过滤装置、common E-box、动力和传动装置、近红外高光谱显微镜、ILMA、相机共10个部分组成。3个跳动探测器分别是MINERVA-II-A1、A2及B, A1、A2与“隼鸟–1号”上的相同,B由一个日本大学协会研制,每个探测器重1 kg左右。这些跳动探测器的目的是验证超低重力场环境下行星表面移动技术,同时进行行星表面科学测量[13]。

图2 MASCOT内部结构Fig.2 The inner structure of MASCOT
其中主要载荷为空间相机、红外辐射计、磁力计和近红外高光谱显微镜。高度和轨道控制系统(AOCS)包括高度轨道控制处理器单元(AOCPs)、2个跟踪雷达(STTs),2个惯性参考单元(IRUs),4个加速计(ACMs),4个低精度的太阳敏感器(CSASs),4个反应轮(RWs)。行星抵近过程中,LIDAR用于测量飞行器距行星表面的高度,精确表面地质测量,5个星标用于抵近过程中的导航。
2.2.1 下降过程
“隼鸟–2号”于日本当地时间2019年2月22日抵近1999 JU3,第1个任务是进行目标行星的全局测量,测量的特征包括自转轴、自转周期、行星形状、行星表面温度分布、表面组成分布等,前3个特征由ONCT/W1获得,后2个特征由TIR和NIRS3,为之后的任务奠定基础。MASCOT通过弹簧装置被驱逐,初始速度保持在cm/s级的可控范围内,通过历时12~16 h在行星表面跳动探测实现行星参数的测定、着陆起飞环境的探测及最佳采样点的确定。
着陆过程大概分为3个过程:①初始下降;②自主控制下降;下放星标;③近表面下降,如图3所示。过程①使用地面配合飞船自主的混合导航方式,垂直下降速度控制在0.1~1 m/s。行星表面的地标作为地面控制点,由地标精确判断飞船与行星间的相对偏移及飞船的速度,偏移过大时,飞船机动转向预定路线;对于过程②,飞至离行星表面100 m高度时,下放星标,飞船用ONC-W1和FLASH捕捉星标,根据星标位置来进行导航,探测器进行多次采样机动,在其中一次机动中释放MASCOT跳动侦查机构,依次探测星标位置科学数据,“隼鸟–2号”返回20 km高空,与MASCOT进行通讯,经过12~16 h的探测,MASCOT最终选定采样点,如图4所示;过程③,向采样选定点自主导航下降,在30 m高度,LRF打开,边遵循星标位置,边控制姿态,最后5 m自由落体,是否落地通过SMP的弯曲或者姿态晃动比率来监测。“隼鸟–2号”一共进行3次着陆演习,确保在指定位置平稳着陆[14]。
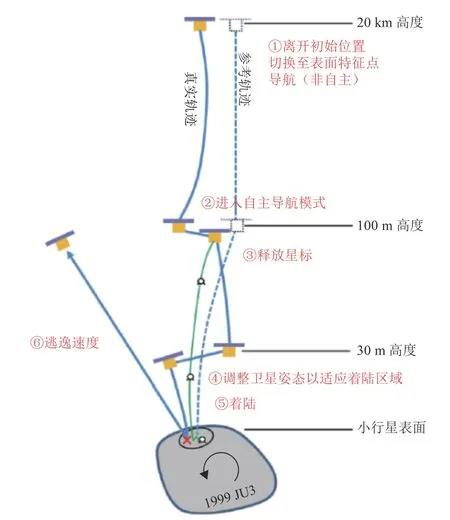
图3 下降及采样过程Fig.3 Descend and sampling process
2.2.2 采样过程
下降过程中ACOS监测“隼鸟–2号”离小行星表面的高度,一定高度时,发射物发射至行星表面并撞击行星表面,反弹起较多行星表面的颗粒,由于行星引力较小,反弹升起的颗粒重力加速度微弱,颗粒将沿着样本收集器内壁折射进入样本容器中,一次样本大致100 mg,采样机构中一共有3个发射物,进行3次发射试验,共收集3次样本。最后将样本容器移至返回舱中,如图5为采样过程。

图4 MASCOT跳动探测Fig.4 Hopping detection of MASCOT
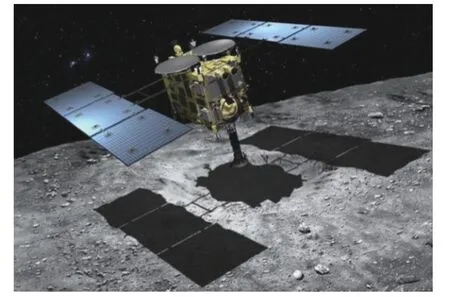
图5 采样示意图Fig.5 Illustration of sampling
“隼鸟–2号”与“隼鸟–1号”不同的是它采集地表下1 m的样本,地表下的采样主要由2种装置完成,它使用气动钻头配合样本收集罩进行。气动钻头深入地表下1 m进行挖掘,将地表下1 m的地质材料裸露在外,之后再进行与地表采样相同的采样过程,气动钻头如图6所示。除了这2个装置,“隼鸟–2号”采用样本输送系统将样本转移到一个旋转式装置(HRMS)中,如图7所示,样本进入收集罩后通过旋转轮输送至样本容器,采样结构简图如图8所示[15]。
2.2.3 撞击过程
弹坑试验由一个小型撞击器(SCI)完成,直径2 m,是一个18 kg重的载荷,圆柱形,直径300 mm,高度200 mm,它在离行星表面500 m高度处释放,撞击前加速至2 km/s,载荷中有计时器,能延迟爆炸,确保飞行器离开并进入安全空间。“隼鸟–2号”通过释放DCAM3相机来观测爆炸过程,将爆炸图像传至“隼鸟–2号”,如图9所示。爆炸直径可达2 m,之后飞行器返回至HP(行星表面20 km高空)观测爆炸产生的弹坑细节[16]。撞击器已成功与探测器分离,并在“龙宫”表面撞击产生陨石坑,便于探测器次表层采样的实施。
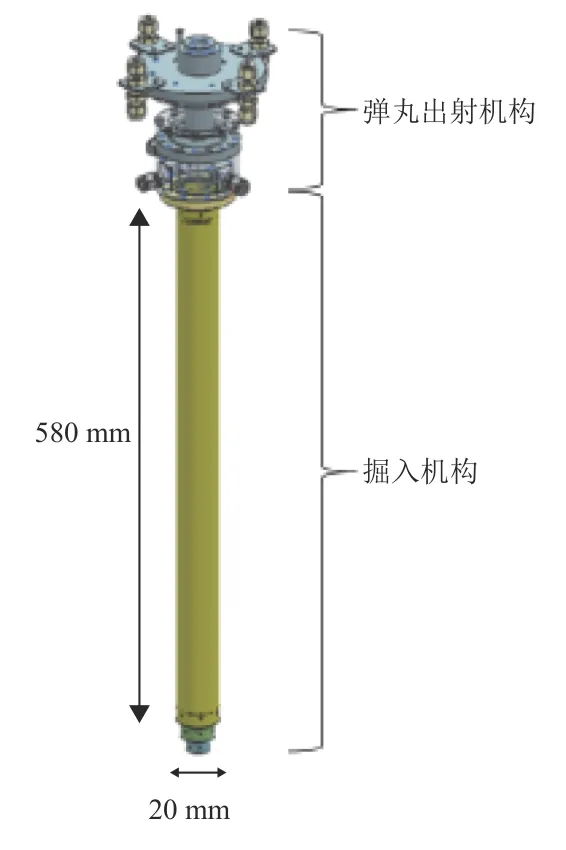
图6 气动钻头结构Fig.6 Pneumatic bit structure
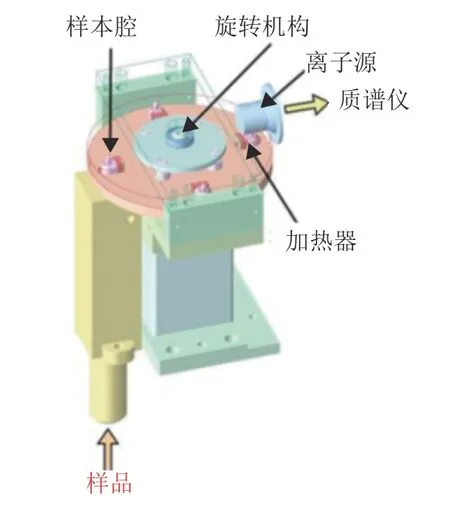
图7 样本输送机构Fig.7 Sampling conveying mechanism

图8 地表下1 m采样装置简图Fig.8 Mechanism for 1 meter underground sampling
2.3 DSI公司的小行星勘探和收获计划
深空工业公司DSI 2013年1月23日成立,其主旨是为空间市场提供“水、推进剂和建筑材料”。 DSI长远战略规划分为4个阶段:对近地小行星的勘探、收获、对原材料的提炼、制造。在2016年的计划中,DSI在研两个微纳星型号:Prospector-X、Prospector-1。在后续研制计划中,DSI目前初步完成了对收获环节的概念设计。
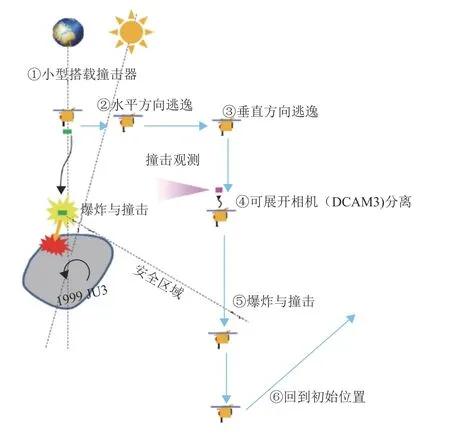
图9 撞击试验路线图Fig.9 The roadmap of impact test
2.3.1 矿产勘探计划
DSI的勘探计划由两个型号完成,一个是技术验证型号Prospector-X,另一个是正式深空探测型号Prospector-1。
1)技术验证型号Prospector-X
Prospector-X号是由卢森堡和DSI共同支持研发的一颗3U立方星。计划于2017年发射升空,运行于近地轨道,对星上搭载的水推进系统Comet-1、深空航电系统和自主导航系统进行技术验证,为下一步Prospector-1的设计进行技术积累。
2)深空探测型号Prospector-1
DSI的目标是从近地小行星带中选取可能富含水的目标小行星。在开展探测目标筛选和轨道优化设计后,DSI将发射历史上第一颗商业小行星采矿探测器Prospector-1[17]。Prospector-1预计干重为30 kg,湿重位50 kg,立方星尺寸约为50 cm。在探测器3个侧面各布置一套推进系统,每套推进系统由4个200 s比冲的Comrt-1水推进器组成。推进系统能提供的总速度增量为1 000 m/s。能源系统由3块展开太阳能的和3块体装太阳能板组成,在1 Au的距离上可以提供120 W的能源;使用X波段通讯系统,在最恶劣情况下能满足1 kbps和3.1 dB的性能指标;使用雷达测距技术进行绝对导航,使用远红外技术进行相对导航,使用视觉测距进行近距离导航;使用货架产品VIS/MWIR相机(10 km上0.5 m分辨率)、中子质谱仪、磁场重力场测量仪和其他降落设备。
2.3.2 收获概念设计
DSI对收获阶段的设计处于概念阶段,目前考虑两个方案。方案一是将近地小行星运回,方案二是从近地小行星上获取一部分材料,将其带回。整星收获方案需要攻关大目标物体的固定技术、消旋技术和大推力推进技术。部分收获方案的实施需要开展小行星着陆、样品抓捕、探测器–样品共同体返回等关键技术攻关。根据DSI的计划安排,收获计划的研究将在Prospector-1发射后启动。
2.4 PR公司的Arkyd计划
行星资源公司(PR)的小行星采矿计划由技术验证型号Arkyd-3、Arkyd-6和正式型号Arkyd-100、Arkyd-200、Arkyd-300组成[18]。
2.4.1 技术验证型号
PR将在Arkyd-3与Arkyd-6上验证相应的卫星分系统技术,并为第一个正式型号Arkyd-100进行技术积累。Arkyd-3与Arkyd-6如图10所示。

图10 Arkyd-3和Arkyd-6Fig.10 Arkyd-3 and Arkyd-6
Arkyd-3在发射过程中由于“猎鹰9号”货运飞船爆炸而失败,后由其备份星Arkyd-3R执行任务。Arkyd-3R是一颗采用3U立方星模型的技术验证星,主要搭载用于Arkyd-100正式型号中的分系统:航电、姿控轨控、推进和星务系统,以及验证地面与卫星之间的数据传输系统。Arkyd-3R的总质量小于5 kg,功率为30 W,配备S频段通讯系统。
Arkyd-3R于2015年4月14日20点10分(UTC)使用“猎鹰9号”火箭发射升空,跟随货舱至国际空间站ISS,并于2015年7月16日由Kibo气闸舱释放,倾角为51.6°。在轨运行5个月后,于2015年12月23日5点30分左右(± 41分)进入大气层烧毁。
Arkyd-6 与Arkyd-3一样同为技术验证星,采用6U立方星模型,发射计划经4次延期,通过搭载“猎鹰9号”升空。Arkyd-6 将携带新的姿控、能源、通讯和航电系统,并测试用于Arkyd-100的富水探测载荷。富水探测载荷主要由中波红外图像系统组成,用近地小行星的温度差异来判断小行星所属种类,并获得富水矿物和行星的关键数据。整个载荷将在近地低轨以地球为目标进行测试,并将在Arkyd-100上对近地小行星进行观测。
Arkyd-6重量约为10 kg,配备35 W功率的太阳能电池片。遥测信号使用UHF频段,设计速率为40 kbps;上行信号使用S频段,速率为500 kbps;下行信号使用X频段,速率为6 Mbps。Arkyd-6上配备主要仪器包括中波红外通用接口,波长3~5 μm,26 m地面分辨率。
2.4.2 正式型号
PR将正式型号定为Arkyd-100、Arkyd-200和Arkyd-300。其中Arkyd-100的任务是在地球轨道对近地小行星进行红外探测,以确定其是否含水等情况。Arkyd-200和Arkyd-300将飞临近地小行星附近完成观测。其中Arkyd-200将为最终Arkyd-300集群任务进行技术积累。
Arkyd-100计划在地球低轨运行,并携带一个15 kg的电子望远镜,总重20 kg,配备90 W功率的太阳能电池片。遥测信号使用UHF频段,设计速率为40 kbps;上行信号使用S频段,最高速率2 Mbps;下行信号使用X频段,最高速率为40 Mbps。Arkyd-100上配备的主要仪器包括可见与远红外高光谱仪,波长400~900 nm,40光谱通道,10 m地面分辨率;配备中波红外仪,波长3~5 μm,20 m地面分辨率。Arkyd-100将观测近地小行星和地球,提供地球图像并获取低至19等星的科学图像。Arkyd-100将支持高速激光通讯。
Arkyd-200目前停留在概念设计阶段,其主要任务是整合合适的推进系统、载荷配置和观测余量,以完成对近地小行星的观测任务,它的设计湿重为250 kg,载荷重量为10 kg,尺寸为95×80 cm,太阳能电池片在1 AU的距离上设计功率大于100 W;使用光学通信,在火星轨道保证高达2 Mbps的通信速度;搭载可见与远红外高光谱仪和中波红外仪。推进系统提供5 km/s的速度增量。
Arkyd-300将在Arkyd-200的基础上实现更为强大的功能。PR将执行针对近地小行星的“Arkyd-300”集群计划。Arkyd-300在环绕近地小行星的轨道上完成对近地小行星的形状、旋转姿态、密度和表面组成成分的分析,从而评估小行星的科学和商业价值。
2.5 NASA的ARM计划
2010年4月,时任美国总统奥巴马宣布了人类探索小行星的任务,该任务由NASA总体负责。任务目标有3个,一是对具有潜在威胁的近地小行星进行防御,二是提升人类探索宇宙的能力和技术,三是小行星采矿。鉴于此,NASA在2013年提出了ARM,它是NASA未来10年发展的一个重要任务,计划实现人类历史上首次小行星抓捕,并将其转移至月球轨道,宇航员在月球轨道提取小行星样本之后带回地球[19]。ARM的实施不仅能够尝试及验证一系列深空探索的技术,同时有利于提升小行星防御能力,还能奠定小行星采矿技术的基础。
ARM任务分为3个大阶段,第1阶段由地基和天基探测器共同选定目标小行星;第2阶段抓捕小行星并转移至月球轨道(ARRM);第3阶段为载人航天器与共同体进行交会与对接并进行采样任务。
第1阶段需选择和确认目标小行星。小行星的选择和确认是小行星重定向任务的基础,NASA利用天基GEO-hosted探测器配合地基SST和PS-2探测器进行小行星的特征提取,主要考虑小行星轨道、尺寸、自旋速率、组成成分等。
目前,NASA通过深空探测已经发现具有潜在利用价值的目标小行星有12颗[20],分别为2007 UN12、2008 EA9、2013 EC20、2010 UE51、2009 BD、2011 MD、2008 HU4、2012 TF79、2006 RH120、2012 LA、2011 BL45及2008 UA202,它们的部分参数如表1所示。

表1 目标小行星部分参数Table 1 Some parameters of the target asteroids
第2阶段是小行星抓捕及转移过程。小行星抓捕及转移过程包括小行星交会抓捕探测器(ACR)抵近小行星、ACR探测器抓捕小行星并消旋、控制ACR探测器–小行星共同体转移至地月轨道这3个过程。对于抓捕NASA提出了两种方案,分别为捕获袋式结构(方案一)、空间机械臂式结构(方案二),方案一中抓取的理想小行星的尺寸是内径4~10 m,最大返回质量1 000 t,具体最大返回质量取决于近地小行星的轨道和太阳能电推进器的功率,任务要求自旋周期大于2 min;方案二中抓取石块的尺寸是内径2~4 m,来自内径大于100 m的小行星上,抓取的最大质量是70 t,电推进功率为40 KW[17]。两种方案如图11所示。为了最大限度地提高目标小行星返回质量,ACR探测器可多次利用月球引力加速,这样的多次加速在40 KW的太阳能电推进系统下需要用时1.4年;将小行星存放在月球逆行轨道(DRO)上,高度约7万km。为了低成本进入稳定的逆行轨道,利用地–月和地–日三体系统的低能量特性对共同体减速。轨道优化计算表明,在地–月系统中飞行8个月,机动20次,实现16 m/s减速机动后,共同体进入稳定的月球逆行轨道[21]。

图11 NASA小行星捕获结构方案Fig.11 NASA’s asteroid capture scheme
载人飞船开采小行星是小行星重定向任务的最后阶段。在ACR探测器与小行星共同体进入月球轨道之后,空间发射系统(Space Launch System,SLS)火箭搭载“猎户座”(Orion)载人飞船进入地月轨道,通过月球引力加速进入远月球轨道,进行与ACR探测器的对接任务,对接完毕后宇航员出舱进行采样作业,采集完毕将样品运至舱内,返回地球。往返飞行的轨迹图如图12所示。
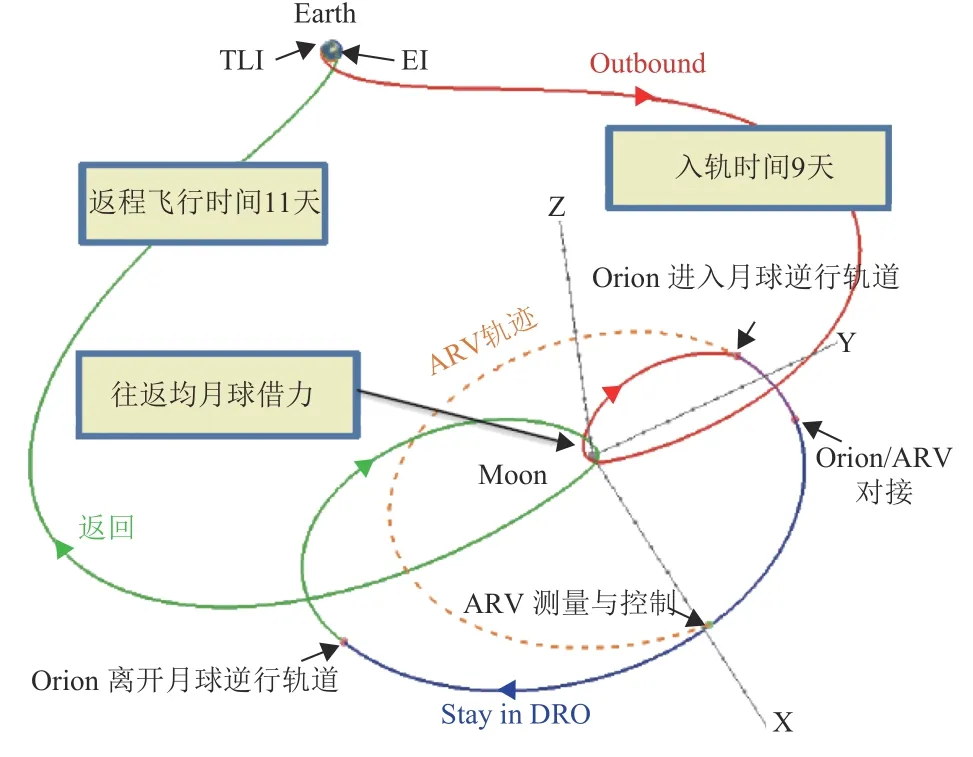
图12 Orion载人飞船与ACR卫星对接轨迹Fig.12 Docking trajectory of the Orion and the ACR satellite
2.6 ESA的AIDA计划
AIDA(Asteroid Impact and Deflection Assessment mission)是ESA和NASA合作的小行星项目。AIDA由两个系统组成:小行星撞击监测器(AIM)和双星系统重定向测试星(DART),如图13所示,其中AIM由ESA研制,DART由NASA研制。AIM能够执行小行星抵近操作,进行空间光通信试验,携带的有效载荷能够研究整个撞击过程任务参数[22]。DART用于测量小行星10%以内的偏转,获取及传递撞击前小行星的高分辨图像,自主导航配合相对导航抵近次星的中心,配合天基导弹技术撞击小行星。
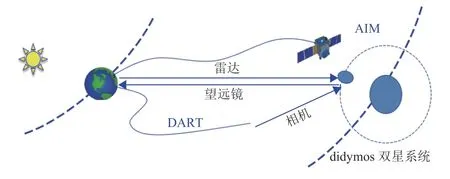
图13 AIDA任务示意图Fig.13 Task sketch map of AIDA
AIDA的目标是近地小行星65803(1996GT)Didymos,18星等,直径为670 m,轨道类型为apollo。AIM携带的一级载荷能够确定双星系统的轨道和旋转动力学参数、小行星质量、地质学物理性能、地表及地下结构,同时,能够开展通信工程实验(TEX),部署MASCOT-2小行星着陆器的小卫星工程实验(MEX),测试COPINS和MASCOT-2着陆器卫星间的网络连接;二级载荷在行星撞击期间,通过测量行星旋转状态的变化,由撞击产生的撞击坑影像及撞击产生的碎石动量来确定这一过程造成的动量转移,了解小行星内部结构,AIM的主要载荷[23]如表2所示。
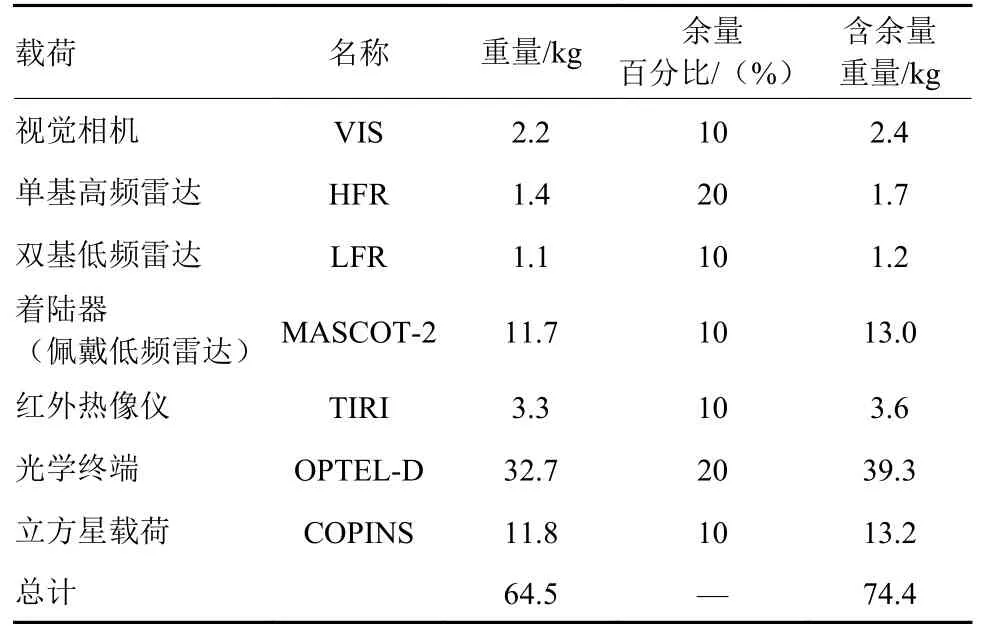
表2 AIM主要载荷Table 2 Payload of AIMs
DART的有效载荷是基于“新地平线号”探测器LORRI的红外热像仪,DART能够自主导航至目标星中心进行撞击任务,撞击点的精度在直径的1%范围内,同时它能够记录撞击之前的小行星表面形态及地质特点。
AIDA是世界航天史上的一个突破性计划,无论在宇宙科学、行星防御还是深空资源探索上均有十分重大的意义。在宇宙科学上:①双星系统重定向的实施有利于探索主星和次星之间的质量传递规律;②通过检测弹坑的形成和小行星材料的分布有助于行星科学的研究;③有利于评估小行星内部结构及成分组成。在行星防御上:①能够掌握动能冲击对行星偏转的影响规律;②通过动能撞击及撞击产生的碎石的溅射规律,评估动能的转移。在深空资源探索上:①推动了地区宇航局之间合作,有利于集中各单位空间技术的优势,推动国际空间硬实力的提高;②发展小天体任务的飞行技术,获得重要经验;③有利于小行星资源的调研。
3 未来近地小行星技术展望
3.1 深空探测推进技术
面对深空任务的特点,巡航段采用太阳能电推进较为广泛,核能推进技术有着较大的挖掘潜质,但目前仍有较大的技术瓶颈。核能的推进方式主要有核热推进、核电推进和核爆炸推进。
核电推进技术使用前景较好,它具有高效能、高速度增量、极高比冲(可达1万s)、长寿命等特点,可以大幅缩短任务周期、提高有效载荷比。深空任务常用核电源主要有两类:放射性同位素温差电源和核反应堆电源。放射性同位素温差电源的研制需要解决放射性同位素的选取和制备、温差电转换器技术、同位素热源单元及核安全技术等,技术门槛较高,且高纯度放射性同位素的制备周期较长,可达数10年[24]。目前国内外大量研究在如何提高反射性同位素温差电源的热电转换效率和质量比功率方面,这对小卫星,微小卫星,航天器推进方式的研究具有重大意义。
3.2 宽适应性探测器平台技术
探测器与地球的最远距离可达2 AU(3×108km)以上,探测器从发射到与小行星交会、采样、采矿返回及地球再入需要持续至少3年多的时间,探测任务对深空环境中的热控、测控与通信、电源等分系统提出了严格的指标要求,且在各个阶段有所不同。由于小行星星历、引力场存在较大的不确定性,在以往的地球轨道卫星或月球探测器中并未遇见,这是深空小行星探测任务所面对的特殊问题,对小行星表面附着、采样、采矿及返回任务的实施带来挑战。
深空探测器的重量直接关系到运载火箭选型与交会–返回过程的燃料消耗,即探测器研制成本与发射成本,因此,需通过载荷平台一体化设计、结构紧凑设计等,实现探测器小型化、轻量化等指标。
3.3 空间机器人技术
随着空间任务的不断深入,对空间机器人在轨服务技术的要求也不断提高。目前,空间机器人可提供的在轨服务有4种方式[25],分别为视觉监测、燃料补给、卫星援助和空间建设。空间机器人技术在小行星消旋、载人飞船对接任务中至关重要。例如大型的小天体取样过程,需要大型柔性机械臂对天体进行抓取,同时还需要结合小型灵巧手进行取样作业。未来空间机器人将朝着环境适应性更强、灵活性更高、技术容错率更大、功能更多的方向发展。
3.4 深空立方星技术
随着低功耗、小型化深空通信、推进、导航、能源与探测器平台等技术的成熟,低成本、研制周期短的立方星在深空探测领域前景广阔。为实现高效、高精度的小行星特征测量,需研究不规则小行星附近的星群组网与小行星特征协同测量,如立方星编队多视角测量三维形状、星–星跟踪测量重力场。
4 结束语
发达国家对于近地小行星深空探测方面的技术愈加成熟,目前已对近地小行星做了较为充分的调研及空间技术验证。未来更深层次的采样、行星防御、小行星抓捕与采矿等空间任务已经提上日程。这类任务对空间推进技术、小行星抓捕技术要求较高,需要加强研制合适的深空推进器,提高空间机器人技术。空间技术难度不断加大,新领域在不断地被开辟,发达国家正在不断拓宽空间技术的深度和广度。我国在行星防御及小行星采矿方面的科研及工程实施还属于空白,亟须开展相关领域的研究与创新,不断提升自身空间技术水平。站在全球空间任务实施的致高点上,获得空间资源采集和利用的主动权。
猜你喜欢
军事文摘(2022年24期)2023-01-05 03:38:22
今日农业(2022年2期)2022-11-16 12:29:47
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
小学科学(2019年12期)2019-01-06 03:38:45
读者(2018年20期)2018-09-27 02:44:48
太空探索(2016年1期)2016-07-12 09:55:54
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27