
基于路面3D激光点云数据的车辙自动测量与横向定位*
2019-05-08 10:38:30李中轶罗文婷郭建钢
传感技术学报 2019年4期
李中轶,罗文婷,李 林,郭建钢
(福建农林大学交通与土木工程学院,福州 350100)
车辙是由汽车轮胎荷载,温度和环境因素的共同作用下形成的行车道轮迹带处的永久形变。车辆行驶时,辙槽处积水所产生的水雾影响行车视线,导致制动系数下降,会影响车辆转弯或变道时的稳定性。同时,车辙病害会继续恶化为龟裂等路面病害,影响行车的安全性和舒适性以及路面结构完整性[1-2]。因此,对路面车辙进行快速,准确地检测并对其特征参数进行提取,是路面养护工作的重要任务。
目前国内普遍采用共梁式非均布13点激光检测设备进行车辙测量[3-4]。但由于点激光数量有限,无法获得完整、连续的道路横断面数据;固定点提取车辙最大深度信息,会影响测量的准确性。同时,采集过程中检测车的偏移,致使无法准确获取车辙的横向位置。模拟人工直尺法和包络线法是较为常用的车辙最大深度测量方法[5-7]。但模拟直尺法和包络线法需要借助于拥包和推波产生的波峰和波谷点,导致了一定的测量误差。
本研究采用全车道覆盖、完全匹配的2D/3D激光点云数据进行车辙的测量及横向定位。研究针对传统车辙检测由于检测车偏移导致车辙定位不准及拥包和推波影响的问题,提出基于路面水平轴处理车辙数据的方法,实现路面车辙的精确测量。同时,通过定位路面2D图像数据中的车道边缘线,获取车辙于车道上的横向位置。最后,本文结合应用实例对比基于路面水平轴的车辙测量方法与包络线法,并通过人工测量结果验证两种方法的准确性。
1 路面3D激光点云数据采集方法
1.1 车载三维激光图像采集设备
本研究采用车载三维激光图像设备进行数据采集,见图1。该设备由两组激光成像设备构成,设备间距2 m,距离地面1.65 m,通过图像拼接,可覆盖整个车道宽度,数据采集速度达100 km/h。检测车行驶中,高功率线激光投影系统向路面发射扇形高亮度线激光,CCD相机以一定角度实时采集路面车辙激光线图像,激光线在相机传感器上显示为被测对象的一个断面,其随车辙深度形态变化而发生弯曲变形[2]。根据激光三角测量原理,测点高程值可以由CCD像平面测量值,相机距地面高度,相机焦距,激光入射线与受光面法线夹角和激光入射线与相机光轴夹角计算得出[8]。通过高功率线激光投影系统和定制光学滤波器,该系统可以在不同光线条件下工作,并保证图像质量的一致性[9-10]。

图1 路面3D激光图像采集设备
1.2 路面2D/3D激光点云数据
三维激光成像设备同时采集完全匹配的2D/3D路面图像数据。2D图像尺寸为4 096 mm(宽)(2 048 mm(长),3D数据尺寸为3 884 mm(宽)(2 048 mm(长)。3D激光点云数据垂直方向上精度可达0.3 mm,水平方向精度可达1 mm[11-12]。2D激光图像数据用于车道边缘线的识别。3D激光点云数据中可提取连续的路面横断面高程曲线,作为车辙检测数据样本。
2 基于路面水平轴的车辙检测方法
2.1 车道内区域数据截取
本文所用的原始数据为4 m覆盖宽度的路面3D激光点云数据。由于数据覆盖范围超过车道宽度,采集数据时会受车道外高程差较大的路面杂物或沿线交通设施的影响,导致激光点云数据两侧出现异常值,从而干扰路面横断面曲线坡度校正和数据平滑,造成曲线坡度校正过高或过低,进而影响车辙参数测量。因此,本研究首先提取路面2D图像上的车道边缘线的横向位置,并基于此截取车道内区域的3D路面图像数据[13-14]。
首先,提取2D路面数据车道边缘线横向位置。本文使用窗口大小为7×7的二维自适应维纳滤波对2D路面图像进行滤波处理,并对非标线区域进行平滑,明确标线区域和非标线区域边缘。采用OSTU最大类间方差法自适应地获取图像阈值,将图像分割为前景(标线区域)和背景(非标线区域)。最后采取准偏区域的方法对标线边缘进行提取和定位。图2(a)为2D路面原始数据,采用上述方法对其标线边缘进行检测和定位,结果见图2(b):左侧标线内侧边缘位于图像上的横坐标为199,右侧标线内侧边缘位于图像上的横坐标为3 553,结果表明,可以实现2D图像标线边缘的提取和横向坐标定位。
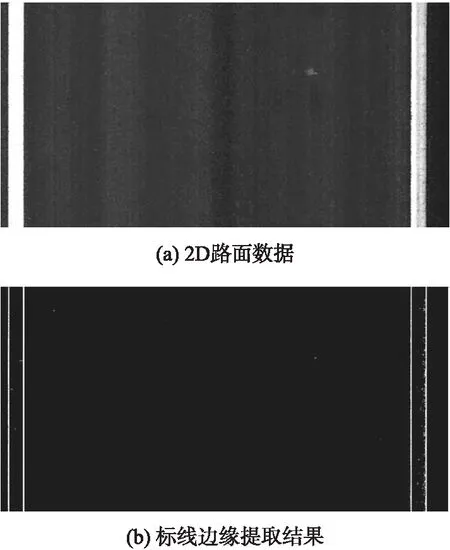
图2 车道边缘线横向位置提取示意图
在标线边缘提取的基础上,对3D激光点云数据中提取的路面横断面曲线进行截取,以获得车道内区域。图3为提取的原始横断面数据和截取后效果对比,图2(a)为处理前效果,图2(b)为处理后效果,方框内为车道外区域,X轴表示路面横断面宽度,Z轴表示激光点高程值,单位均为(mm)。图3(a)曲线两端方框区域存在高差较大的异常激光点高程数据。根据标线边缘定位结果,截取车道内区域,截取后效果如图3(b)曲线所示,可以消除车道两侧异常值的影响,解决其干扰横断面曲线坡度校正和数据平滑的问题。
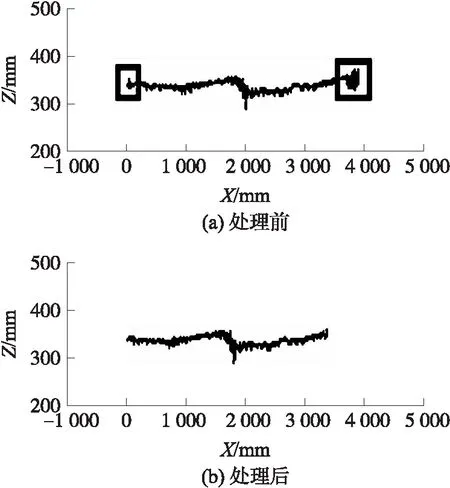
图3 车道内区域截取示意图
2.2 路面横断面中缝消除及平滑处理
为覆盖整条车道宽度,本研究使用两个工业相机(每个相机横向覆盖2 m宽度)采集路面激光3D图像数据。检测车行驶中的颠簸会影响图像拼接的效果[15],导致拼接后路面横断面曲线存在中缝,如图4(a)曲线所示,方框内为拼接处中缝,图4(b)曲线为处理后效果。
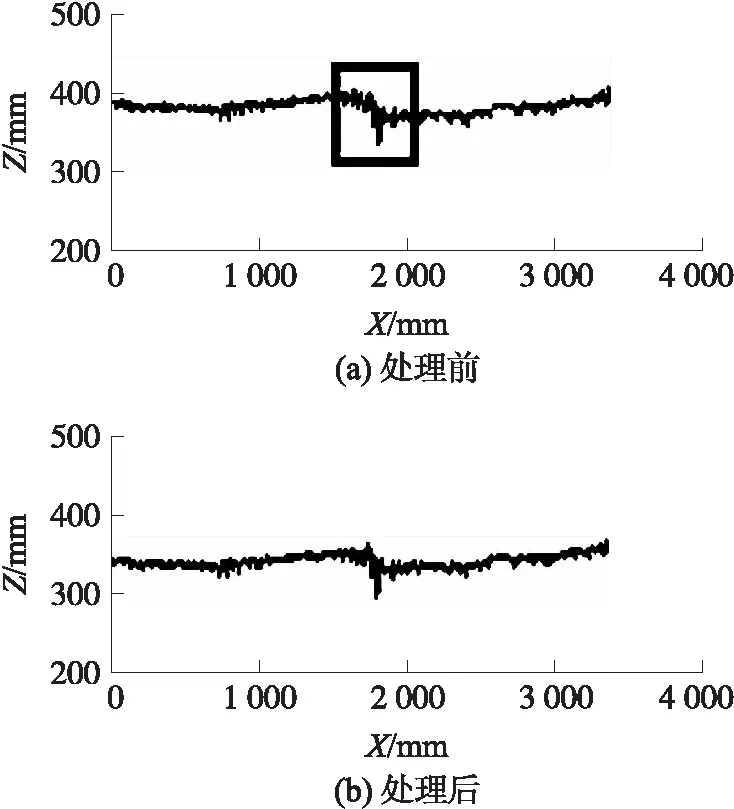
图4 路面横断面中缝去除结果示意图
假设左右两侧激光点云数据横坐标范围分别为[1,n1]和[1,n2],可由式(1)~式(4)对曲线左右两部分激光点云数据进行处理,消除路面横断面曲线中缝[16]。基于图4中的数据,计算得出mean1和mean2分别为341 mm和334 mm,对yj进行7 mm的提升,从而去除中缝,其效果如图4(b)曲线所示。
(1)
(2)
m1=mean1-mean2
(3)
yi=yi+m1,m1<0
yj=yj+m1,m1>0
(4)
式中:mean1为曲线左半部分激光点高程均值(mm);yi为曲线左半部分激光点高程(mm);mean2为曲线右半部分激光点高程均值(mm);yj为曲线左右半部分激光点高程(mm);m1为两者侧高程均值差(mm)。
同时,路面反光物的反射会导致激光数据存在高频干扰噪声和系统随机噪声[17]。如图4所示,高频干扰噪声以幅值较大的尖峰形式出现,系统随机噪声以幅值较小的均匀毛刺形式出现,二者都会影响车辙参数的测量及横向定位,需要对其进行平滑处理。本文利用局部加权回归的方法对路面横断面曲线激光数据进行平滑,去除高频干扰噪声及系统随机噪声,平滑效果如图5所示。
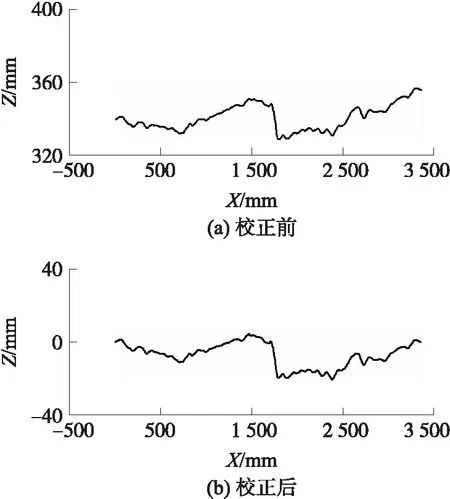
图5 路面横断面曲线坡度校正结果示意图
2.3 基于路面水平轴的横断面坡度校正
检测车采集数据时在存在横坡度的路面上行驶,激光横剖面数据会存在一定的倾角,如图5(a)曲线所示,这会影响车辙最大深度、宽度的测量,因此需要对路面横断面曲线进行坡度校正,使其旋转至水平,再进行车辙表征参数的测量[18]。
首先,受路面形变的影响,需提取非形变区域数据构建路面水平轴。提取截取后的车道内横截面左右边缘点云数据。通过式(5)计算横剖面曲线倾斜角θ。然后,基于此倾斜角将整个横剖曲线旋转至水平,其中各点的高度值可通过式(6)、式(7)计算得到。坡度校正后的效果如图5(b)曲线所示。同时为了方便后续对车辙进行测量和定位,将路面横断面曲线整体下移至坐标轴y=0处。
(5)
h=(xk-x1)tanθ
(6)
yk=yk-h
(7)
式中:θ为水平轴与坐标系x轴之间的夹角;yn为曲线右端未发生形变点的高程,(mm);y1为曲线左端未发生形变点的高程,(mm);h为曲线上每点应校正的高度差,(mm);x1为曲线左端未发生形变点的的横坐标;k的范围为[1,n];xk为曲线上点的横坐标;yk为曲线上点的高程,(mm)。
2.4 基于路面水平轴的车辙特征点提取
车辙的特征点包括左右车辙的端点及谷底点。研究定义横剖面与路面水平轴的交点为车辙端点,车辙的最深点为谷底点,如图6所示。
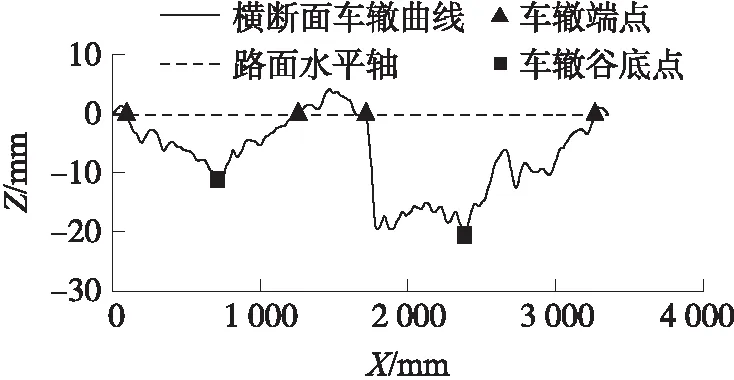
图6 车辙特征点提取示意图
车辙端点及谷底点的提取算法如下:假设左/右车辙激光点横坐标范围为[1,a],分别设定O(x,y)为车辙谷底点,P(x,y)为车辙左端点,Q(x,y)为车辙右端点,具体见式(8)~式(10):
O(x,y):
yd=min(yk)
(xd,yd)
(8)
P(x,y):
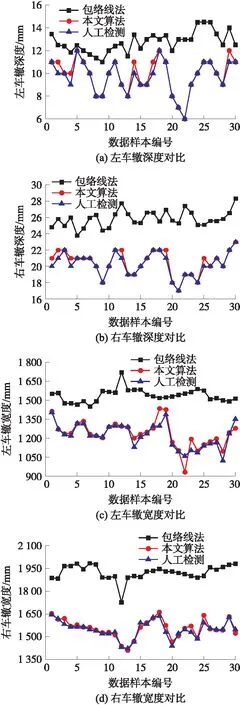
ym1=max(yk),1 (9) Q(x,y): ym2=max(yk),xd (10) 式中:k的范围为[1,a];yk为左车辙每点的高程,(mm);yd为左车辙谷底点高程,(mm);ym1为横坐标在[x1,xd]内最大高程,(mm);xp为[xm1,xd]内高程为0点的横坐标;ym2为横坐标在[xd,a]内最大高程,(mm);xq为[xm2,a]内高程为0时点的横坐标; 在车辙特征点提取的基础上,可对路面横断面曲线进行车辙表征参数的测量(车辙宽度及最大深度)以及车辙的横向定位。 车辙宽度即车辙壁左右端点之间的水平距离,车辙最大深度即路面横断面曲线谷底点到路面水平轴的垂直距离,可通过式(10)、式(11)计算得出。基于图7车辙数据,左车辙宽度为1 185 mm,右车辙宽度为1 680 mm;左车辙最大深度为11 mm,右车辙最大深度为20 mm。 widthL=wL1-wL2 (10) widthR=wR1-wR2 (11) 式中:widthL:左车辙宽度,单位(mm);wL1:左车辙左交点横坐标;wL2:左车辙右交点横坐标;widthR:右车辙宽度,单位(mm);wR1:右车辙左交点横坐标;wR2:右车辙右交点横坐标。 结合车辙特征点及车道边缘线坐标,可实现对车辙的横向定位。以图7为例,左车辙3个特征点与左侧标线内侧边缘的相对距离分别是88 mm,719 mm,1 273 mm,右车辙3个特征点与左侧标线内侧边缘的相对距离分别是1 675 mm,2 372 mm,3 271 mm。根据以上6点和标线边缘的相对距离,可以得出车辙在路面上的精确横向定位。 图7 车辙最大深度示意图 本文所用数据样本采集地点为福州三环快速路,道路采用沥青路面,数据采集路段总长2.1 km。起点A经纬度坐标为(26.047 44,119.235 21),终点B经纬度坐标为(26.028 38,119.244 32)。 本节分别采用包络线法和本文算法对30组路面横断面数据检测处理。同时,为验证包络线法和本文算法检测结果的准确性,本文采用人工检测法对数据样本进行车辙测量和横向定位,将结果和包络线法及本文算法检测结果作对比分析。按照沥青路面车辙测试方法[19],人工检测法具体流程如下:由3名有充分车辙检测经验的检测人员分别对该数据样本进行人工检测,得出车辙横向定位,车辙宽度和车辙最大深度,然后对3组人工检测结果求平均值,将其作为人工检测结果。 图8 包络线法、本文算法和人工检测车辙参数测量结果对比 3.2.1 车辙表征参数测量结果对比及分析 如图8所示,针对车辙测量结果,对包络线法、本文算法和人工检测3种方法进行对比。车辙最大深度分布情况如图8(a)、8(b)所示,车辙宽度分布情况如图8(c)、8(d)所示。通过计算包络线法,本文算法和人工检测结果的相对误差[20],对比2种算法车辙测量结果的准确性。对比人工测量结果,包络线法车辙最大深度平均测量误差为31%;车辙宽度平均测量误差为25%。本文算法车辙最大深度平均测量误差为1%,宽度平均测量误差为2%。由此可得,本文算法测量结果相对误差更小。 3.2.2 车辙定位结果及对比分析 针对车辙定位点,对本文算法和人工检测结果进行对比,针对左右车辙6个定位点,使用描述性统计中的相关系数对本文算法结果和人工检测结果进行相关性分析,以验证本文算法车辙定位结果的准确性。本文算法车辙端点横向定位与人工测量结果的相关系数为0.91,车辙谷底点横向定位与人工测量结果的相关系数为0.99,该结果表明本文算法可以实现对车辙的精确得横向定位。 本文利用2D图像和3D激光点云数据,结合基于路面水平轴的车辙检测方法进行车道内区域截取、中缝消除、平滑、坡度校正、坐标定位及车辙参数计算处理,实现对路面车辙的自动测量及定位。 ①研究提出的车辙检测方法消除了推波、拥包及车道外杂物干扰带来的误差;通过坡度校正,精准提取车辙表征参数;自动识别提取车道边缘线坐标,实现对车辙于车道内的横向定位。 ②将研究所提算法与包络线法、人工测量结果对比,本文算法在车辙参数测量方面与人工检测结果的相对误差更小,获得的车辙最大深度和车辙宽度更符合路面实际情况;在车辙定位方面通过三点定位法可以对车辙进行精确地横向定位,与人工检测结果相关度在90%以上,最高可达99%。 ③本文提出路面水平轴确定路面车辙自动测量及横向定位方法,可用于路面车辙检测,为道路养护提供数据支撑,有一定的应用价值。
(xm1,ym1)
ifym1>0
(xp,0),xm1
(xm2,ym2)
ifym2>0
(xq,0),xm22.5 车辙表征参数测量及横向定位

3 试验与分析
3.1 数据采集计划
3.2 试验结果对比及分析
4 结语
猜你喜欢
卫星应用(2021年11期)2022-01-19 05:13:02趣味(作文与阅读)(2021年9期)2022-01-19 01:26:02工程建设与设计(2021年11期)2021-07-28 06:33:08科学大众(2021年9期)2021-07-16 07:02:50中国交通信息化(2020年11期)2021-01-14 03:30:34上海公路(2018年1期)2018-06-26 08:37:26中华老年口腔医学杂志(2016年6期)2017-01-15 14:25:21北方交通(2016年12期)2017-01-15 13:52:46中国感染控制杂志(2015年7期)2015-12-13 08:30:42中国交通信息化(2015年10期)2015-06-06 06:39:31
