复杂双容水箱系统的递阶预测控制优化算法
2019-05-08 08:23孙忠林郑鹏远
上海电力大学学报 2019年2期
孙忠林, 郑鹏远
(上海电力学院 自动化工程学院, 上海 200090)
实际工业生产往往由不同设备组成,由于不同设备的固有特性各不相同,导致整个生产过程非常复杂。有些生产过程可能有多个输入与输出,甚至不同输入和输出之间存在十分复杂的耦合关联,输入量与输出量之间不是简单的一对一的对应关系。复杂双容水箱作为典型的双入双出耦合对象,可以方便地通过改变手动阀门来改变阀门开度和各个水箱间的液位耦合程度,从而可以模拟具有不同耦合特性的系统。这对于耦合系统的控制研究具有一定的代表性。传统的比例积分微分(Proportion Integral Differential,PID)控制是单变量控制器,在控制多入多出耦合系统时很难达到令人满意的控制效果,而预测控制可以通过预测模型预测系统的未来动态,对有限时域内的性能指标进行滚动优化,优选出控制量,不仅可以实现对多入多出耦合系统的控制,而且调整速度快,可以实现比传统控制更优的控制效果[1]。
复杂双容水箱系统是典型的耦合系统,针对多变量耦合系统,文献[2]提出了一种数据驱动的带有变遗忘因子的自适应子空间预测控制方法,有效地将在线子空间辨识方法用于模型预测控制中,实现了预测模型的在线更新。文献[3]提出了一种改进的多变量约束预测控制算法,引入控制增量的期望衰减因子,使用梯度下降迭代算法处理约束,实现了水箱的半实物仿真。文献[4-6]针对两入两出系统分别提出了不同的解耦方法,并在解耦基础上设计了分散PID控制器。文献[7]通过训练模糊认知网络,实现了具有非线性特性的系统的建模及参数辨识,设计了带终端约束的非线性Hebbian学习算法。文献[8]提出了近似动态规划的预测控制算法,通过使用近似动态规划求解水箱液位控制的动态跟踪优化问题,实现了优于PID控制的控制效果且降低了计算量。文献[9]针对四容水箱系统,设计了使用小波神经网络作为预测模型的广义预测控制算法,通过模糊前馈补偿解耦,实现了耦合系统的解耦。文献[10]针对含有非最小相位零点的对象,提出了相平面分区法,并进一步结合微分反馈实现了较好的四容水箱控制效果。文献[11]将自适应预测控制应用于三容水箱的液位控制,且与其他方法对比,实现了良好的控制效果和较好的鲁棒性。
复杂双容水箱预测控制算法,通过对有限时域内的性能指标函数进行优化,从而优选出进水阀门控制输入量。随着优化时域长度的增加,系统的控制性能有望进一步得到改善,但系统的动态预测表达式将面临越来越高的矩阵阶数,导致系统动态预测数学表达式的复杂度和在线优化计算量有所增加,尤其是当优化时域趋向无穷时,该优化问题会成为无穷时域优化问题,而无穷时域优化将进一步导致其在线优化计算难以实现。为降低复杂双容水箱预测控制问题的在线优化计算量,本文基于时间分解,将由优化时域长度增加所引起的大规模参数优化问题分解为各时间点上独立的小规模参数优化问题,分解后各个时间点的小规模参数优化问题与其他时间点上的参数将不再存在互相关联,从而可以用解析方法分别单独求出各时间点上的显式优化解。随后,通过设计递阶预测控制对优化时域长度上的关联性进行协调,以有效降低在线计算负担,实现较优的复杂双容水箱液位控制效果。
1 复杂双容水箱液位控制系统的优化问题建模
复杂双容水箱系统的结构如图1所示[12]。该系统主要由4个水箱及每个水箱的液位检测装置、水泵、蓄水池、电动调节阀和变频器组成。

图1 复杂双容水箱系统结构示意
4个水箱及蓄水池的作用是用来储存水,4个水箱内均有用于检测液位的压力传感器。4个水箱分为上水箱和下水箱,其中3#和4#水箱为上水箱,1#和2#水箱为下水箱。2个上水箱分别由2个水泵供水,3#水箱由水泵1供水,4#水箱由水泵2供水,2个水泵的供水流量分别由电子调节阀和变频器控制,开度均可在0~100%,且可随意设置。2个下水箱与2个上水箱间通过4个手动调节阀相互连接,2个上水箱的水通过4个手动调节阀流入下水箱。3#水箱的水既可通过阀门1进入1#水箱,也通过阀门2进入2#水箱;4#水箱的水可通过阀门3进入1#水箱,也通过阀门4进入2#水箱。下水箱的水经各自的阀门直接排入蓄水池。每个水箱允许储存液位的最大值均为30 cm。当达到水箱能够储存的最大水量后,过量流入的水将通过额外设置在水箱上的溢流管路流出,直接流回最下方的蓄水池。通过调整手动阀门1~4可以方便地调整3#和4#水箱出水的流量以及每个上水箱流到2个下水箱的流量比例,从而实现水箱液位特性的改变,并能够改变上下水箱之间液位关系的耦合程度,得到具有不同系统数据的复杂双容水箱耦合系统。将电动调节阀开度u1和变频器开度u2作为复杂双容水箱系统的控制输入,1#和2#水箱内液位的高度作为系统输出时,该过程为典型的双入双出耦合系统[12]。
单个水箱均满足动态液位平衡关系
(1)
式中:A——水箱横截面积;
h——水箱内液位高度;
qin——水箱进水流量;
qout——水箱出水流量。
由伯努利方程可知水箱出水口出水流量qout满足
(2)
式中:a——水箱出水口的横截面积;
g——重力加速度。
综合式(1)和式(2),可以得出复杂双容水箱对象系统液位动态平衡方程为[9]
(3)
式中:Ai——第i个水箱的横截面积,i=1,2,3,4,m2;
ai——第i个水箱出水口的横截面积,m2;
hi——第i个水箱的液位高度,m;
Pij——水箱出水分流阀的分流系数;
Q1——水泵经电动调节阀向3#水箱供水的流量;
Q2——水泵经电动调节阀向4#水箱供水的流量。
复杂双容水箱实际参数如下[12]:4个水箱的横截面积均为3.14×10-2m2,液位高度hi允许的最大值为0.3 m,各水箱出水口的横截面积分别为a1=0.000 20 m2,a2=0.000 15 m2,a3=0.000 42 m2,a4=0.000 39 m2。
水箱液位和出水流量的关系是非线性关系。本文通过拟合将液位和出水流量关系线性化,并按照采样时间为5 s使用一阶欧拉法将系统模型离散化,最终得到复杂双容水箱的离散线性模型为
x(k+1)=Ax(k)+Bu(k)=

(4)
该离散线性模型的能控性矩阵的秩为
(5)
其能控性矩阵满秩,因此系统能控。
复杂双容水箱的控制目标是通过控制电动调节阀及变频器的开度来调整3#和4#水箱的进水流量,最终实现1#和2#水箱内液位能够很好地跟踪液位设定值。
为实现良好的复杂双容水箱液位优化控制,本文选取液位状态和设定值偏差的二次函数,并引入终端代价函数构建无穷时域性能指标,建立起复杂双容水箱无穷时域液位跟踪动态性能优化问题的数学描述为

2 基于时间分解的复杂双容水箱液位系统递阶预测控制优化算法设计
基于系统模型进行预测控制,预测系统的未来动态,通过优化系统动态进而优选出控制序列,并将控制序列的第一项施加到系统上,待到下一时刻再重复以上优化过程,可以有效地改善系统控制性能。其工作原理如图2所示。

图2 预测控制结构示意
根据复杂双容水箱状态空间模型和当前时刻复杂双容水箱中各水箱液位的状态值,按照选定的控制优化时域K,通过时间分解求解优化时域长度内液位跟踪性能指标的优化问题,得到能够使液位跟踪性能最好的优化控制序列u(k),k=0,1,2,…,K-1,然后实际控制时只取控制序列的第一项u(0)施加到复杂双容水箱系统上,在下一时刻重复测量新的液位值,并在新的液位状态下计算新的最优控制序列,反复执行,使控制策略能够及时根据液位的实际情况修改控制量,减小控制误差,实现较好的控制效果。

(8)
其中
α(k-1)x(k)
k=0,1,2,…,K-1
(9)
α(K-1)x(K)
(10)
根据对偶原理,经过上述步骤即可将约束优化问题转换为对应的无约束优化问题

(11)
在给定了α(k)的情况下,可以将α(k)作为协调变量,将无约束对偶问题分为两级递阶优化[14]。
2.1 递阶优化第一级
给定协调变量α(k),k=0,1,2,…,K-1,分别求解按照时间分解后的子优化问题。
(1)k=0时刻,x(0)=x0已经给定,求解优化问题

α(0)[Ax(0)+Bu(0)]
得到
u(0)=-R-1(0)BTα(0)
(12)
(2)k=1,2,3,…,K-1时刻,求解优化问题
得到
x(k)= -Q-1(k)[ATα(k)-α(k-1)]+
xref(k)
(13)
u(k)=-R-1(k)BTα(k)
(14)
(3)k=K时刻,求解优化问题

α(K-1)x(K)
得到
x(K)=-Q-1(K)α(K-1)+xref(K)
(15)
式(12)和式(14)是按照按时间分解协调后优选出的控制序列,式(13)和式(15)表示在预测时域内各优化控制量u(k)的作用下,复杂双容水箱系统未来具有的液位响应预测值。
2.2 递阶优化第二级
αl+1=αl+σldl,l=0,1,2,…
(16)
其中,σl是合理选取的步长,梯度值为
dl=
(17)
递推迭代终止条件为相邻两时刻的协调向量变化不大,即梯度值的无穷范数满足
‖dl‖∞<10-4
(18)
经过上述时间分解,把优化性能指标L的任务按照时间分解为不同时间点各自相互独立的小规模子优化问题。在每个Lk的优化中,由于α(k)作为协调变量已经确定,就只是确定最优参数x(k)和u(k)的问题。根据Lk的二次型表达式,它们可以直接按照式(12)~式(15)解析求解。
上述为多容水箱时间分解协调控制算法。综合预测控制滚动优化思想和按时间分解协调控制算法,经过上述两级分解协调过程求得优化问题式(4)的最优解。之后将控制器取最优控制序列的第一项u(0)作为系统实际控制量施加至水箱对象,测量得到系统下一时刻的新状态值,然后在下一时刻重复执行上述两级递阶优化步骤,重新计算在系统新状态下的最优解,从而保证被控对象在受到扰动后及时响应,系统输出不出现大的波动,以增强系统的鲁棒性。
2.3 复杂双容水箱递阶预测控制优化算法
步骤1起始时刻k=0时,初始化优化时域K,权矩阵Q及R,迭代步长,拉格朗日协调因子预估值。
步骤2k≥0时刻,检测状态信息x(k)。
步骤3对第l次进行迭代。按照式(12)~式(14)计算当前α(k)下x及u的最优解;利用最优解迭代求解拉格朗日协调因子α(k)。若满足收敛条件式(18)则跳转步骤4,否则继续计算α(k)下x及u的最优解,更新拉格朗日因子。
步骤4按式(12)取最优解u(0)施加至被控对象。
步骤5k=k+1,返回步骤2,重复以上步骤。
3 数值仿真
复杂双容水箱系统液位控制的目标是让1#水箱与2#水箱液位跟踪设定值,3#水箱与4#水箱液位不作控制。4个水箱液位初值均为0 m,阀门开度限值为0~100%,分别采用本文控制算法与PID控制算法(PID参数通过衰减曲线法进行初步整定,并根据实际控制效果进行微调,属于效果较好的PID参数)进行仿真。为说明本文算法的优势,仿真中取多组不同液位作为水箱液位跟踪的设定值。
不同设定值下闭环系统状态曲线响应图如图3~图5所示。由图3~图5可以看出,尽管复杂双容水箱本身是一个具有双入双出高度耦合特点的复杂对象,本文算法仍能在很短时间内将水箱液位迅速调整到设定的期望值。
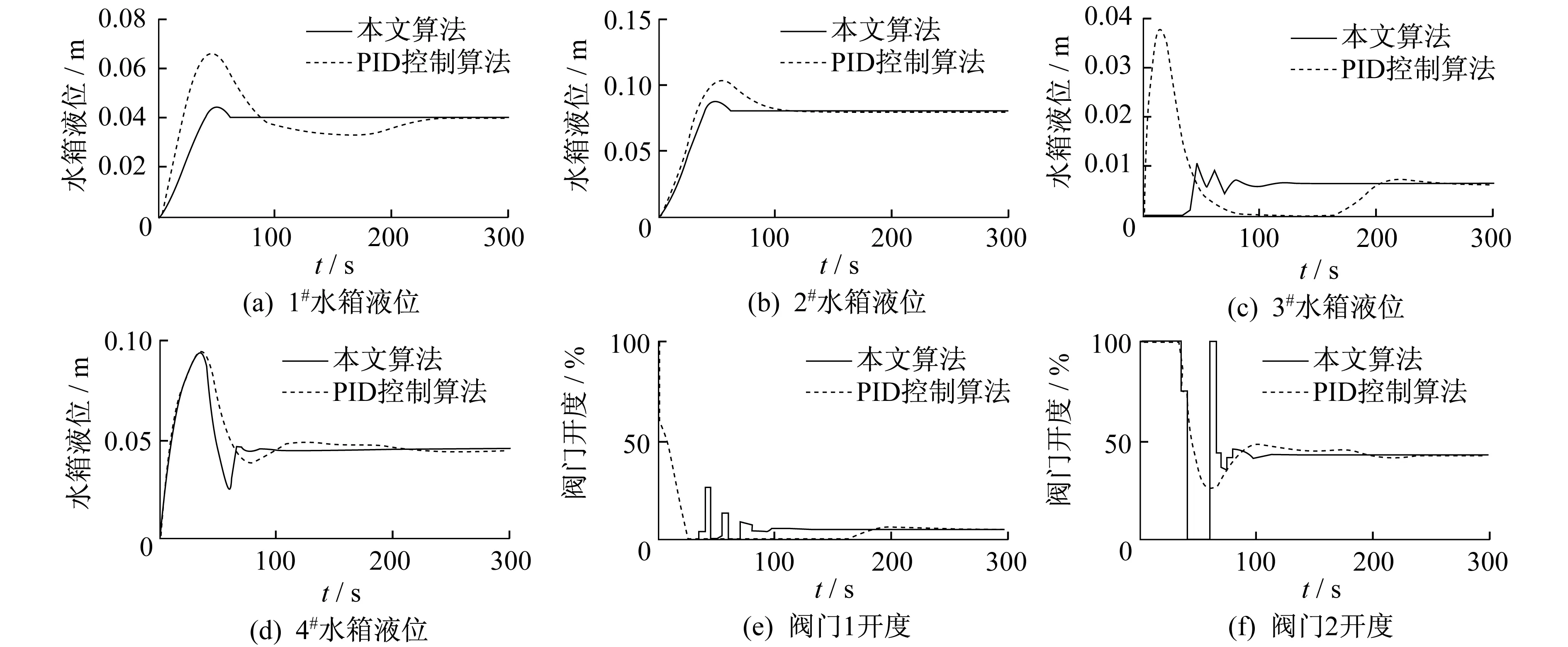
图3 例1设定值下液位响应对比
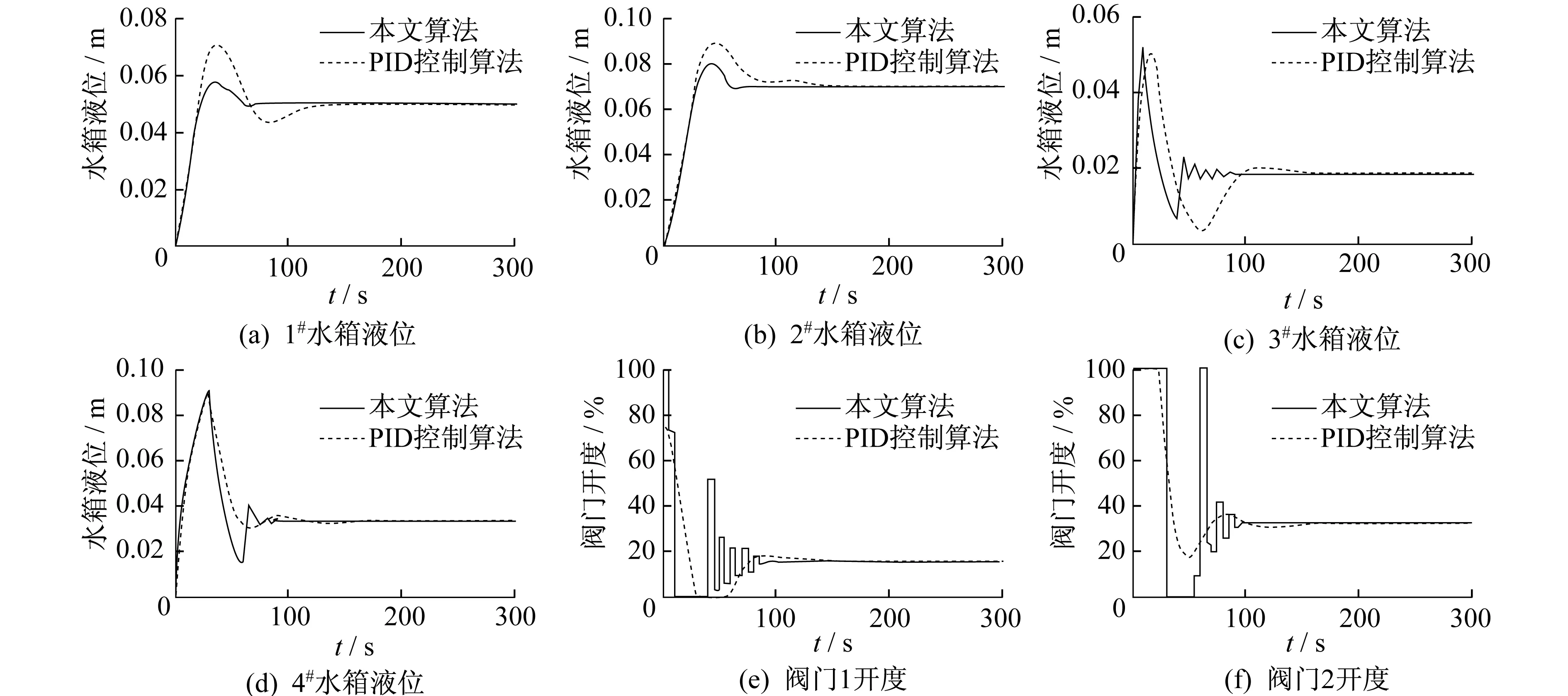
图4 例2设定值下液位响应对比

图5 例3设定值下液位响应对比
两种算法的控制性能指标对比如表1所示。由表1可知,与PID算法的控制效果相比,本文算法在响应超调量、调整时间、平方误差积分指标等方面均有提高。
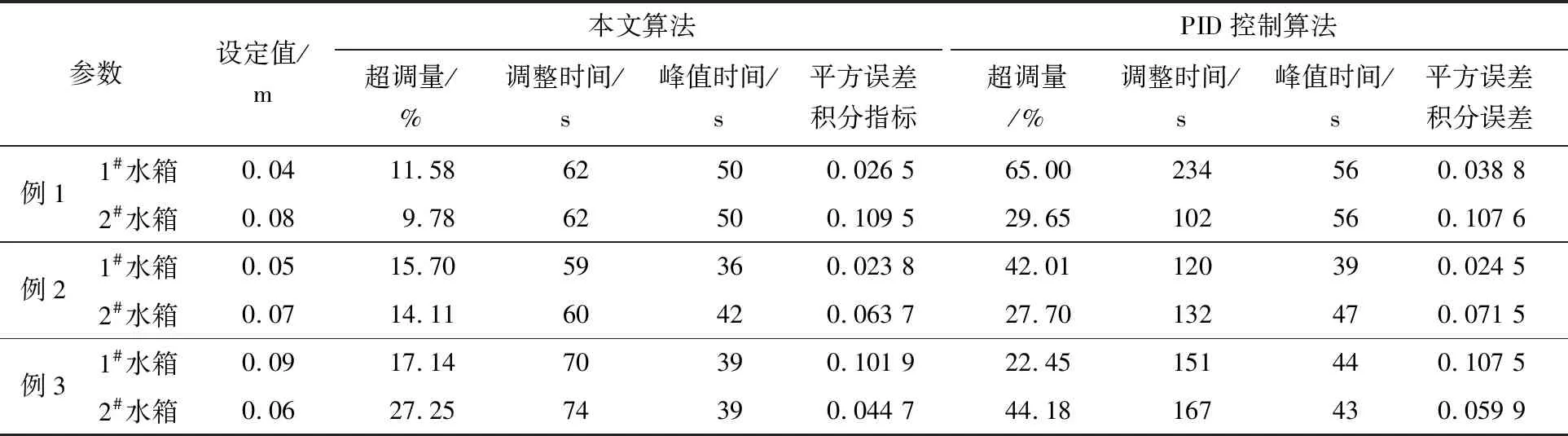
表1 性能指标对比
4 结 语
针对复杂双容水箱对象,本文通过按时间方向分解的思想设计了递阶预测控制优化算法,在每一时刻通过时间分解来求解优化问题的解析优化解。随后通过递阶控制进行协调,优选出进水阀门控制输入量,并施加至被控对象。随着时间的推移,反复执行滚动优化过程,实现了复杂双容水箱液位的优化控制,并保证了一定的鲁棒性。与传统PID控制相比,调整时间大幅度缩短,有效地改善了复杂双容水箱的控制性能;通过时间分解避免了传统预测控制算法的计算复杂度,取得了较优的液位控制效果。
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
湖北农机化(2021年7期)2021-12-07
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17
质量技术监督研究(2015年1期)2015-04-09
汽车维护与修理(2015年2期)2015-02-28
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01