
基于多模式融合的双自由度太阳能追踪系统的研究与设计
2019-05-07 01:23李立鹏黄天怡刘中仁莫慧淑
天津科技 2019年4期
李立鹏,高 建,黄天怡,刘中仁,方 茹,莫慧淑
(天津商业大学 天津300134)
当前全球传统燃料能源储量日渐降低,太阳能作为可再生能源,备受社会关注。为了克服太阳能收集效率低下的问题,本文设计了基于多模式融合的双自由度太阳能追踪系统,微控制器选用 MSP430F149单片机,融合闭环光电检测与开环视日运动轨迹追踪模式,创新性地选择双自由度的结构实现全方面、全时段追踪太阳光心,可最大限度地提高太阳能接收装置热效率。
1 太阳能追踪系统
当下太阳能追踪系统并不完善,太阳光垂直照射最佳效果无法确保,不能最大限度地实现太阳光的利用,因而出现太阳能收集效率低的问题。近年来,针对太阳能追踪装置的研究相对密集,其追踪模式主要包括闭环-光电检测法以及开环-视日运动轨迹追踪法。视日运动轨迹追踪是依照天文常识确定太阳角度,随着太阳运动轨迹变化实现追踪。光电检测追踪是通过对比实时光强从而确定最佳对日角度。
按照执行机构在追踪方向上的不同,又有单轴、双轴追踪之分。单轴追踪只跟踪太阳的方位角,不追踪高度角,结构简单,但不能始终保持主光轴与太阳光线入射方向平行。双轴追踪有高度角-方位角式和极轴式全跟踪区分。其中极轴式全跟踪方法简单,但其支承装置不易设计、不易实现;高度角-方位角式可以分别在水平方向和垂直方向旋转,实现二维追踪,较为简单,支承装置容易实现且跟踪精度高。
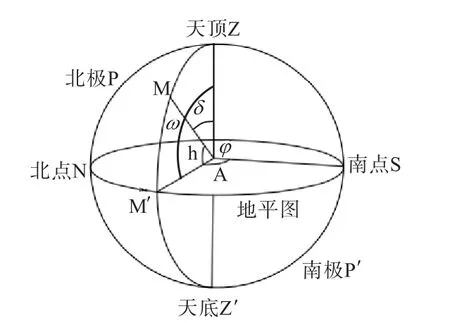
图1 太阳的高度角h和方位角AFig.1 Solar altitude angle h and azimuth A
如图1所示,h是太阳高度角,A是太阳方位角,ϕ是当地纬度,δ是赤纬角,ω是时角。
太阳高度角h:

太阳方位角A:

不管选择任何一种模式,都要将光敏装置安装在挡光板周围,通过对挡光板位置的改变,实现太阳光投影的改变,当光照作用在光敏电阻上就会有微电流产生,通过放大电路、AD转换等硬件电路作用后,在微控制器的作用下,驱动电机等装置改变角度实现最大限度接收太阳光。
2 多模式融合的太阳能追踪系统总体方案
综合多种太阳能跟踪模式、方案的特点,以获取太阳能最大利用率为目的,采用了闭环控制的光电追踪与视日运动轨迹追踪相融合的双自由度太阳能追踪技术。本装置采用计算机单片机控制,步进电机驱动旋转的主动-被动相结合的追踪方法。
通过一组光敏器件对白天和黑夜进行检测以判断系统的工作环境。白天的时候就执行白天所设定的运行方案,到了晚上系统就处于睡眠状态,如果光照强度达到预先的设定值,系统就会启动,进入白天的运行模式。白天系统进行工作时,会对光照强度进行检测,只有当光电传感器感应值达到白天的设定值时,系统会进行光电追踪,如果没有达到,系统就采用视日运动轨迹追踪方式。不管是视日运动轨迹追踪还是光电追踪,最终都是通过把光电信号转换为步进电机的驱动信号来使太阳能电池板转动,从而追踪太阳。
3 多模式融合的太阳能追踪系统硬件设计
选择 MSP430F149单片机作为控制单元,通过光敏元件检测太阳光,确定黑夜或是白天,进而通过微控制器进行模式选择,进一步将操作数据发送到电机驱动装置,实现电机角度的控制进而确保太阳能板最大限度垂直太阳光。图2为系统结构框图。

图2 系统结构图Fig.2 System structure diagram
3.1 微控制器介绍
综合设计需要,微控制器选用低功耗、高性能的MSP430F149,该控制器A/D转换模块精度为12位,I/O引脚多达48个,包括了5类功能模块,均能单独实现设定,此外还具备带捕获比较功能的 16位定时A(B)以及 PWM 输出、基本时钟、串行通信等外设,较好地满足了系统设计中光电检测电路、时钟电路、电机驱动电路、辅助电路的资源需要(图3)。

图3 系统原理图Fig.3 System schematic diagram
3.2 光电检测电路的设计
光电检测主要完成两方面工作,一方面对光照强度进行检测,判断白天还是黑天,晴天还是阴天,此外还可以实现对太阳能板位置进行判断。太阳光照射在光电传感器上,通过 AD转换实现光电信号转换,进而传输至控制器,通过软件给控制器设定阈值,从而确定何时、采取哪种模式进行追踪(图4)。
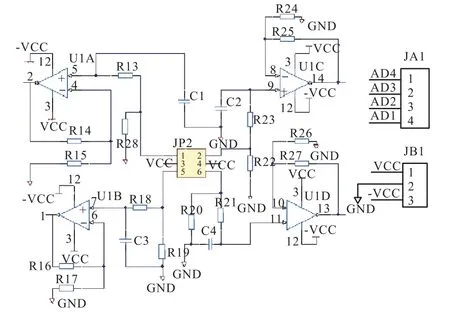
图4 光电检测电路Fig.4 Photoelectric detection circuit
3.3 时钟电路设计
设计过程中选择了 DS1302外部时钟芯片,DS1302能够较好实现时序控制,支持从秒到日期范围的时间设定,抗干扰能力强、连线量小、体积不大,适合小型控制组件,通过读取当前时间,实现该时间下太阳方位角、高度角的计算(图5)。
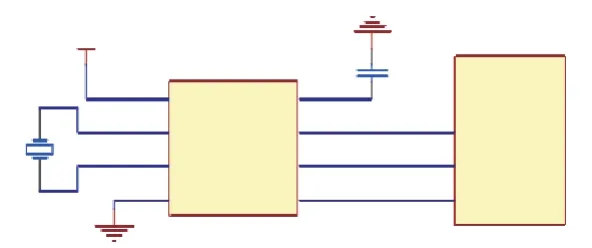
图5 时钟电路Fig.5 Clock circuit
3.4 驱动电路设计
系统设计过程中应用 L298N芯片驱动水平、垂直两个方向的步进电机转动,微控制器将计算出的方位角和高度角信号发出,MSP430F149通过产生两个通道的PWM波,实现步进电机按照控制方向进行相应角度的旋转(图6)。
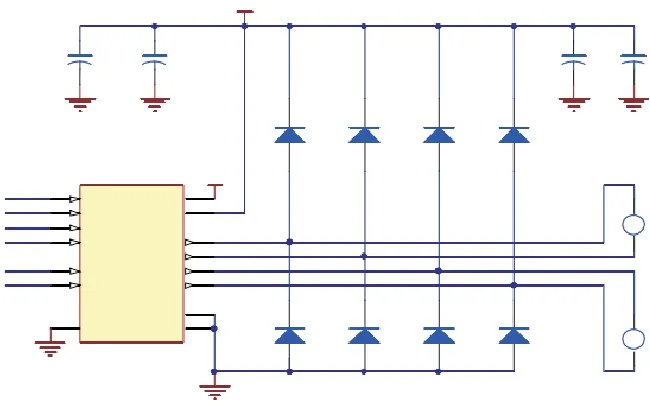
图6 电机驱动电路Fig.6 Motor driving circuit
4 多模式融合的太阳能追踪系统软件设计
系统通电启动,首先实现初始化,之后光电检测模块对当前是白天还是黑夜进行判断,如果是黑天状态,系统将会采取中断,保持低功率待机;假如是白天,通过光电强度检测确定追踪模式,晴天状态下采取光电追踪,阴天时,采用视日运动追踪模式(图7)。
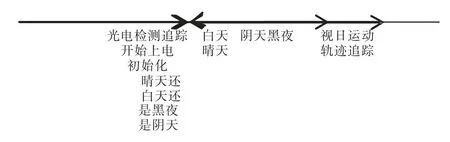
图7 系统总体流程图Fig.7 General flow chart of system
首先由光敏传感器检测是白天还是黑夜,是晴天还是阴天;用软件给单片机设定一个阈值,若超过阈值为白天,否则是黑夜。
若是黑夜采用蓄电池供电,若是白天则检测是晴天还是阴天。同样给单片机设定一个阈值,当光敏传感器检测并经AD转换后的数值超过一定值为晴天,否则为阴天。
晴天时采用光电检测追踪模式,随时检测太阳光入射角的改变,由光敏传感器测得的电压值传给单片机,经 AD转换后,单片机判断是否应该改变电池板的角度及方向,然后发出指令,驱动步进电机的转动方向和步数转动到合适的方位角。
阴雨天时采用视日运动追踪模式,由软件根据读取外部时钟电路的时间,判断太阳现在的位置,并判断和前一次的方位上角度相差多少度,以此确定好当前应该控制步进电机的转动方向和角度。
5 结 论
在完成追踪系统的设计之后,经过不同环境的测试,系统能够初步满足设计要求,天气晴朗环境下,吸收太阳能的接收装置可以按照光敏传感器的检测改变太阳能板的位置,使其始终垂直于太阳光;在阴天的环境下,按照程序设定,太阳能吸收装置每隔特定周期,改变相应的角度,实现视日运动轨迹追踪。尽管完成了基本追踪要求,但由于机械结构粗糙、光电传感器精度不足,使得系统在实施过程中存在一定的误差,有待进一步完善提高。
猜你喜欢
结构工程师(2022年2期)2022-07-15
华人时刊(2021年15期)2021-11-27
小天使·一年级语数英综合(2021年8期)2021-08-17
空间科学学报(2020年4期)2020-04-22
中学生天地·高中学习版(2020年3期)2020-04-10
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
少儿科学周刊·儿童版(2015年7期)2015-11-24
少儿科学周刊·儿童版(2015年7期)2015-11-24
少年科学(2015年6期)2015-07-01
