基于三轴加速度传感器的抽油机冲次、冲程测量装置的设计
2019-04-28 12:26支中元
价值工程 2019年2期
支中元
摘要:抽油机冲程、冲次是绘制抽油机示功图、计算抽油机平衡率的重要参数。通过加速度传感器测量冲程、冲次,避免了传统拉线式、角度式等方法故有的故障率高、操作繁琐、需要停井等缺点,具有自动化、不影响生产等特点。采用单轴加速度传感器测量抽油机冲程误差较大,而该项目使用三轴加速度传感器,并采用新技术、新算法,能够精确测量抽油机冲程、冲次,而且可以将数据远传至智能终端,因此该项目具有重要的研究意义和应用价值。
Abstract: The pumping speed and stroke of the pumping unit are important parameters for drawing the indicator diagram of the pumping unit and calculating the balance ratio of the pumping unit. The measurement of the pumping speed and the stroke by acceleration sensor can avoid the disadvantages of the traditional wire-drawing type and the angle type, such as high failure rate, cumbersome operation, and need to stop the well, and has the characteristics of automation and no influence on production. There is a large error in the measurement of pumping speed and stroke with single-axis accelerometer. The project uses a three-axis accelerometer and adopts new technology and new algorithm to accurately measure the pump speed and stroke, and can transfer the data to the intelligent terminal, so the project has important research significance and application value.
關键词:三轴加速度;抽油机;单片机
Key words: three-axis acceleration;pumping unit;single chip microcomputer
中图分类号:TE933 文献标识码:A 文章编号:1006-4311(2019)02-0093-03
0 引言
抽油机冲程、冲次是判断抽油机运行工况的重要参数。抽油机冲程有多种测量方法,如拉线法、游梁角位移法、悬点加速度法等,但是均有一定的不足。如拉线法需要抽油机停机,易出现断线故障,而且不适合在线监测;游梁角位移法需要使用角位移传感器,该传感器长期受力,易损坏;悬点加速度法一般利用单轴加速度传感器测量抽油机悬点加速度,再对加速度进行二次积分,计算抽油机冲程。该方法测量精度较低,只能通过冲程标定的方法测量抽油机位移,而且每台抽油机都需要单独标定,操作繁琐。
综上所述,目前所使用的抽油机冲程、冲次测量方法均由一定的缺点。该项目采用三轴加速度传感器对抽油机悬点加速度进行测量,通过数字滤波对加速度数据进行处理,利用加速度传感器的Y、Z轴数据对对X轴加速度数据进行误差修正,然后设计新型数字积分算法来计算抽油机冲程;同时根据悬点加速度数据的变化特征,判断当前抽油机的上、下冲程状态,是否处于上、下死点,计算抽油机的冲次。最后,可以将采集的数据通过无线通讯方式远传至智能终端[1-2]。
1 硬件电路设计
1.1 整体设计方案
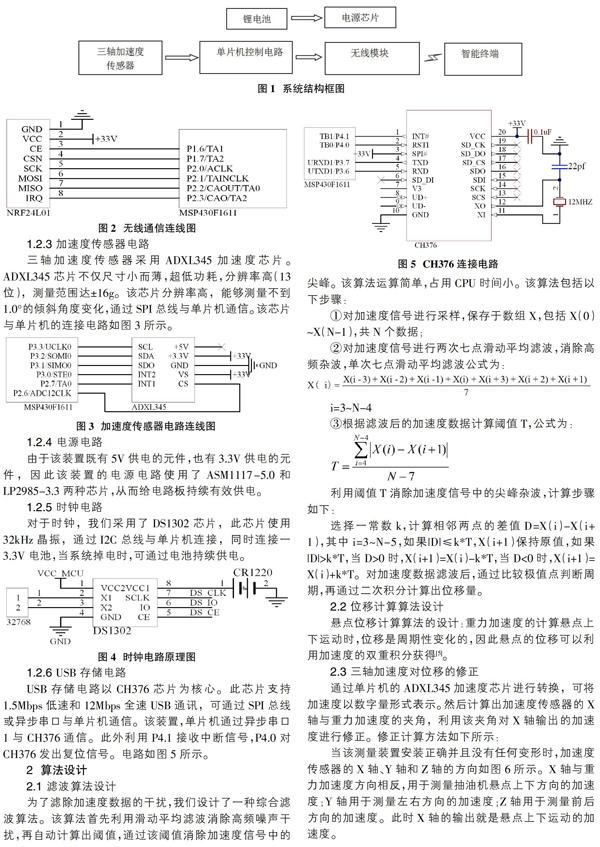
本系统由电源模块、单片机控制模块、加速度数据采集和无线模块、数据接收终端组成,可固定安装于抽油机悬点。电源模块包括锂电池和电源芯片,向整个装置供电。三轴加速度传感器测量抽油机悬点加速度,以数字信号形式输出,通过SPI总线通信后,送入单片机控制电路,再利用单片机内部编写的滤波算法、加速度修正算法和冲程、冲次计算算法对数字量处理,准确计算抽油机的冲程、冲次,并利用存储器存储,最后利用无线模块将数据传送至智能终端。(图1)
1.2 单元电路设计
1.2.1 单片机控制电路
该装置选用TI公司的MSP430F1611单片机来作为其微控制器。该单片机是一个处理能力强、超低功耗、运算速度快、超低功耗、片内资源丰富的16位单片机。MSP430系列单片机能在25MHz晶体的驱动下,实现40ns的指令周期。[3]
1.2.2 无线通信电路
无线传输模块使用了NRF24L01芯片。此芯片输出功率频道选择和协议的设置可以通过SPI接口进行设置[4]。芯片可以连接到绝大部分单片机芯片,并拥有126个通讯通道,6个数据通道,可满足多点通讯和调频需要。该芯片可以在低功耗模式1.9-3.6V下工作,待机模式下状态为22uA;掉电模式下为900nA,内置2.4GHz天线且体积小巧且编程非常方便。我们用插座实现芯片与单片机的连接,并设置相应的I/O口,实现新芯片的无线传输功能。该模块与单片机的接线如图2所示。
1.2.3 加速度传感器电路
三轴加速度传感器采用ADXL345加速度芯片。ADXL345芯片不仅尺寸小而薄,超低功耗,分辨率高(13位),测量范围达±16g。该芯片分辨率高,能够测量不到1.0°的倾斜角度变化,通过SPI总线与单片机通信。该芯片与单片机的连接电路如图3所示。
1.2.4 电源电路
由于该装置既有5V供电的元件,也有3.3V供电的元件,因此该装置的电源电路使用了ASM1117-5.0和LP2985-3.3两种芯片,从而给电路板持续有效供电。
1.2.5 时钟电路
对于时钟,我们采用了DS1302芯片,此芯片使用32kHz晶振,通过I2C总线与单片机连接,同时连接一3.3V电池,当系统掉电时,可通过电池持续供电。
1.2.6 USB存储电路
USB存储电路以CH376芯片为核心。此芯片支持1.5Mbps低速和12Mbps全速USB通讯,可通过SPI总线或异步串口与单片机通信。该装置,单片机通过异步串口1与CH376通信。此外利用P4.1接收中断信号,P4.0对CH376发出复位信号。电路如图5所示。
2 算法设计
2.1 滤波算法设计
为了滤除加速度数据的干扰,我们设计了一种综合滤波算法。该算法首先利用滑动平均滤波消除高频噪声干扰,再自动计算出阈值,通过该阈值消除加速度信号中的尖峰。该算法运算简单,占用CPU时间小。该算法包括以下步骤:
①对加速度信号进行采样,保存于数组X,包括X(0)~X(N-1),共N个数据;
②对加速度信号进行两次七点滑动平均滤波,消除高频杂波,单次七点滑动平均滤波公式为:
4 结语
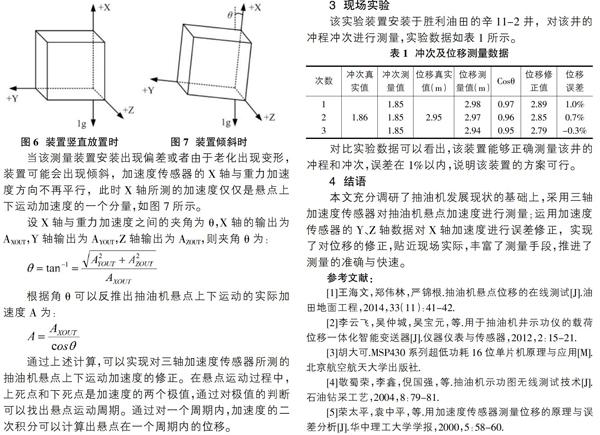
本文充分调研了抽油机发展现状的基础上,采用三轴加速度传感器对抽油机悬点加速度进行测量;运用加速度传感器的Y、Z轴数据对X轴加速度进行误差修正,实现了对位移的修正,贴近现场实际,丰富了测量手段,推进了测量的准确与快速。
參考文献:
[1]王海文,郑伟林,严锦根.抽油机悬点位移的在线测试[J].油田地面工程,2014,33(11):41-42.
[2]李云飞,吴仲城,吴宝元,等.用于抽油机井示功仪的载荷位移一体化智能变送器[J].仪器仪表与传感器,2012,2:15-21.
[3]胡大可.MSP430系列超低功耗16位单片机原理与应用[M].北京航空航天大学出版社.
[4]敬蜀荣,李鑫,倪国强,等.抽油机示功图无线测试技术[J].石油钻采工艺,2004,8:79-81.
[5]荣太平,袁中平,等.用加速度传感器测量位移的原理与误差分析[J].华中理工大学学报,2000,5:58-60.
猜你喜欢
石油石化节能(2022年12期)2022-12-30
设备管理与维修(2022年21期)2022-12-28
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年12期)2018-08-01
计算机测量与控制(2017年6期)2017-07-01
电子制作(2017年19期)2017-02-02
电子设计工程(2015年15期)2015-02-27
中国煤层气(2014年6期)2014-08-07