
全局渐近稳定的移动机器人轨迹跟踪
2019-04-27 01:37刘振纲
科技资讯 2019年1期
关键词:移动机器人
刘振纲

摘 要:伴随当前轮式移动机器人受到人们的广泛关注和应用,在机器人智能化方面的要求也逐步提高。机器人的智能化水平的高低主要是看机器人是否可以自行对运行的姿态以及位置进行判断。所以在进行机器人控制系统设计的过程中需要对机器人的状态进行准确采集,并且依照状态进行运动反馈。机器人在进行运动控制的过程中需要进一步重视末端执行器的航迹轨迹、速度和加速度的控制和管理。在进行机器人的运动控制的过程中主要采取模糊控制、PID控制、变结构控制等,在此过程中变结构控制在各种线性和非线性的系统当中非常适用,具有非常好的抗干扰和自适应性。
关键词:全局渐近稳定 移动机器人 轨迹跟踪
中图分类号:TP24 文献标识码:A 文章编号:1672-3791(2019)01(a)-00-02
1 移动机器人轨迹跟踪概述
当前,变电站巡检机器人利用的主要是2D/3D激光来完成创建地图以及定位导航等相关工作,通过激光完成观测定位,并且让机器人能够依照需要进行自主行进。
该研究的重点在于双轮差速驱动的变电站巡检机器人的轨迹跟踪。首先需要进一步研究上述移动机器人在设计中的运动学模型,依照Lyapunov稳定性理论以及反步时变状态反馈的方法对控制律进行研究,让移动机器人在轨迹跟踪的过程中处于全局渐近稳定的状态。
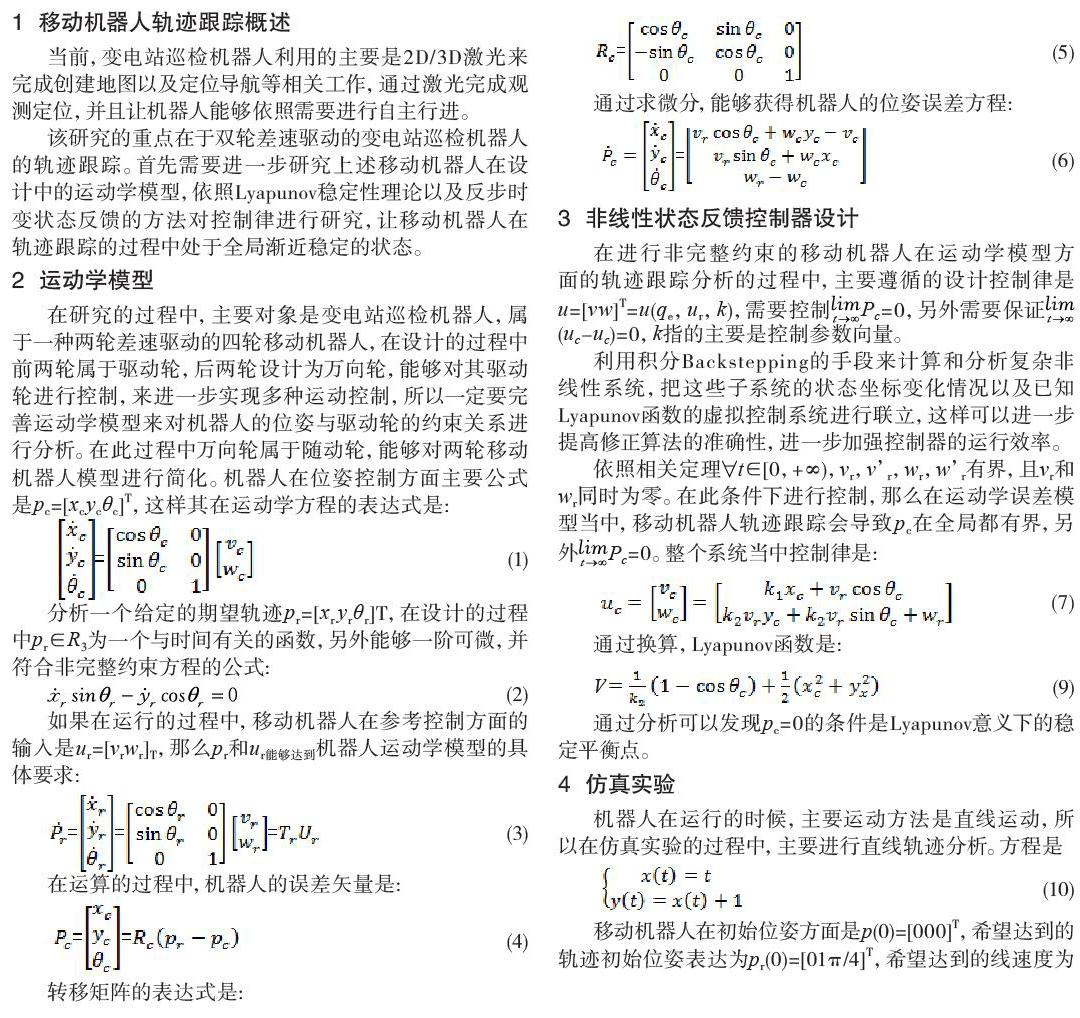
2 运动学模型
3 非线性状态反馈控制器设计
在进行非完整约束的移动机器人在运动学模型方面的轨迹跟踪分析的过程中,主要遵循的设计控制律是u=[vw]T=u(qe,ur,k),需要控制Pc=0,另外需要保证(uc-uc)=0,k指的主要是控制参数向量。
利用积分Backstepping的手段来计算和分析复杂非线性系统,把这些子系统的状态坐标变化情况以及已知Lyapunov函数的虚拟控制系统进行联立,这样可以进一步提高修正算法的准确性,进一步加强控制器的运行效率。
移动机器人在初始位姿方面是p(0)=[000]T,希望达到的轨迹初始位姿表达为pr(0)=[01π/4]T,希望达到的线速度为vr=1m/s,角度需要控制在wr=0rad/s,另外控制器的常数设定为k1=80,k2=80,k3=40。完成仿真后结果如图1~图4所示。
可以发现移动机器人可以完成跟踪预期轨迹,稳定性非常好,具有一定的实用价值。
5 结语
该文依照变电站巡检机器人在运行过程中的实际需要,进行了非线性状态反馈控制器的設计来进一步控制轨迹跟踪的情况,保证其可以依照预期轨迹操作。在实践的过程中,可以保证移动机器人在轨迹跟踪的过程中具有全局渐近稳定的作用。仿真结果符合方法应用的需要。
参考文献
[1] 王猛,靳伍银,王安.轮式机器人轨迹跟踪控制系统的设计[J].计算机测量与控制,2017,25(10):102-104,107.
[2] 张扬名,刘国荣.一种新型的移动机器人轨迹跟踪控制方法[J].计算机工程与应用,2013,49(23):257-260.
[3] 闫茂德,贺昱曜,吴青云.移动机器人全局轨迹跟踪的自适应滑模控制[J].微电子学与计算机,2006,23(4):97-100.
[4] 闫茂德,贺昱曜,武奇生.非完整移动机器人的自适应全局轨迹跟踪控制[J].机械科学与技术,2007,26(1):57-60.
[5] 张鑫,刘凤娟,闫茂德.参数不确定移动机器人全局轨迹跟踪的自适应滑模控制[J].微电子学与计算机,2011,28(7):132-135.
猜你喜欢
设计(2020年24期)2020-01-25
现代职业教育·中职中专(2018年11期)2018-06-11
物联网技术(2017年3期)2017-03-30
物流科技(2017年3期)2017-03-29
现代电子技术(2017年4期)2017-03-23
现代电子技术(2016年23期)2017-01-12
电子技术与软件工程(2016年20期)2016-12-21
科学与财富(2016年28期)2016-10-14
企业文化·中旬刊(2015年12期)2016-03-09
软件导刊(2015年8期)2015-09-18
